 電子發燒友App
電子發燒友App


01 ? 導語
在了解液態透鏡之前,小編想先來跟大家聊聊人眼。我們之所以能夠看到東西,是因為有光射入到了我們的眼睛當中。所以漆黑一片的夜里,我們啥也看不見。光線進入到我們的眼球之后,會經過一個非常重要的部分,叫做晶狀體,它里面包裹著的是柔軟、透明的蛋白質,可以把它想象成一個棗核型的果凍。外界光線在晶狀體的折射下,會非常準確地聚焦在眼球最后方的視網膜上。人類之所以能夠看清不同距離的物體,正是因為眼球中的睫狀肌能夠自動調整眼球中晶狀體的弧度,從而改變不同光線的折射角度使其準確地聚焦在視網膜上。所以當你看遠處的物體時,眼前的近處物體就開始模糊;反之,當注視到眼前的物體時,遠處的物體卻開始出現虛化。
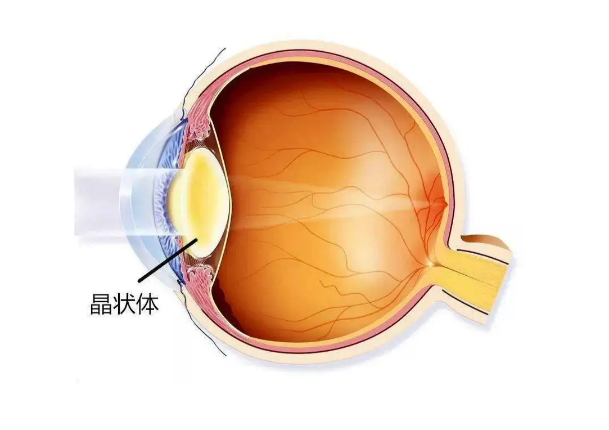
圖1(a)人眼結構示意圖,(b)液態鏡頭示意圖
本質上透鏡成像和我們人眼觀察并且記錄影像的方式是一樣的。液態透鏡是使用一種或多種液體制作而成的一個無機械部件,并通過控制液面形狀無限可變的透鏡,是對人類晶狀體的仿生化模仿,最終使用時效果也大致與眼球相同,在不同模式下能實現焦距和焦點的變化,它有著傳統光學透鏡無法比擬的性能,可通過調節參數改變液體界面的曲率,在超短時間內實現流暢、快速變焦。
02 ? 發展過程
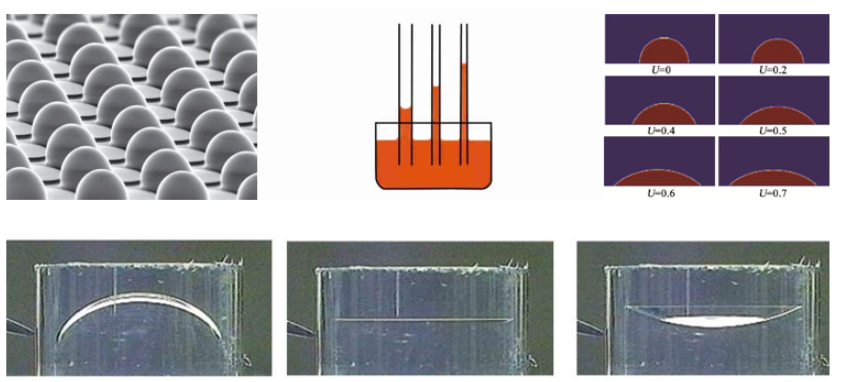
圖2 液態透鏡的發展
17世紀,英國科學家發現水滴的表面曲率會隨孔徑的變化而變化;
1875年,Lippmann 研究了電毛細現象;
1936年,Froumkin 對電潤濕現象進行了研究;
1995年,Gorman 等人利用電潤濕現象第1 次實現了變焦液體透鏡;
2000年,法國Berge 等研究員改進了設計并創立Varioptic公司;
2004年,荷蘭Philip公司開發出新型無機械活動部件的變焦液體透鏡;
2006年,Varioptic公司推出兩款產品,實現液體透鏡商業化;
2021年,小米宣布將在手機上使用液態鏡頭。
03 ? 工作原理
液體透鏡主要有兩種類型:反射式和透射式。
反射式是指一個焦距可變的鏡面。當裝有液體(一般是水銀)的容器旋轉的時候,離心力的作用將使液體表面形成一個正好符合望遠鏡要求的理想凹面。反射式的液體透鏡只須改變旋轉速度,就能使液面的形狀改變成需要的形狀,這可以大大降低制造大型天文望遠鏡的加工難度和成本。
透射式按照驅動方式分類可大致分為兩類:一種是機械驅動,常見的變焦方式有靜電力驅動、電磁力驅動、壓力調節和環境響應;另一種是物性驅動,一般是使用液晶材料、電化學技術、介電泳技術和電潤濕技術。
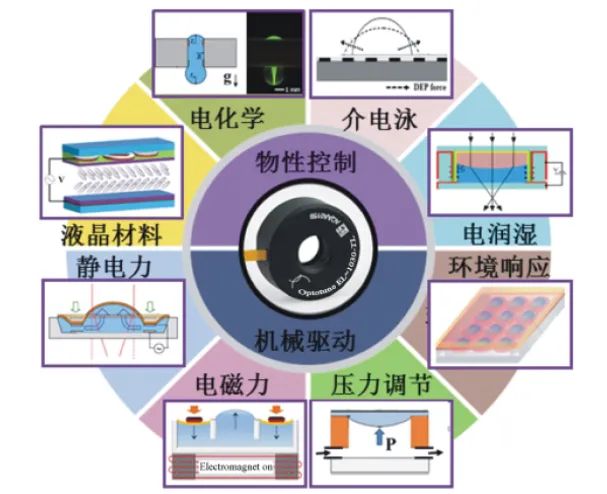
圖3 液態透鏡驅動方式分類
1)??機械驅動式液態透鏡
機械驅動式液態透鏡通過調節鏡頭腔體壓力和改變外界環境使液體介質的界面曲率和折射率改變,從而實現變焦。
a.??基于液晶材料的變焦透鏡
大約在40年前,研究人員發現可以利用靜電場控制平面型液晶微透鏡實現變焦功能。研究成果表明,在不施加外部電場時,液晶分子按照一定角度排列,如圖4(a)所示。在環形電場作用下,液晶分子取向會趨于電場方向傾斜,并且,隨著電場強度的增大,傾斜角變大。在圖4(b)中,由于電場強度從中心向邊緣增強,因此中心的液晶分子傾斜角度較小。
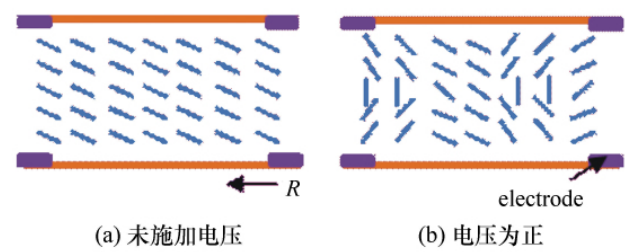
圖4 液晶材料透鏡在不同電壓下液晶分?取向示意圖
b.??基于電化學活化的液態透鏡
電化學活化作用能夠使水溶性分子在表面非活性態和表面活性態之間轉化,實現對溶液中表面活性物質濃度的調控。同時,水溶性分子濃度的變化會導致液體表面張力改變,使液體介質產生變形。
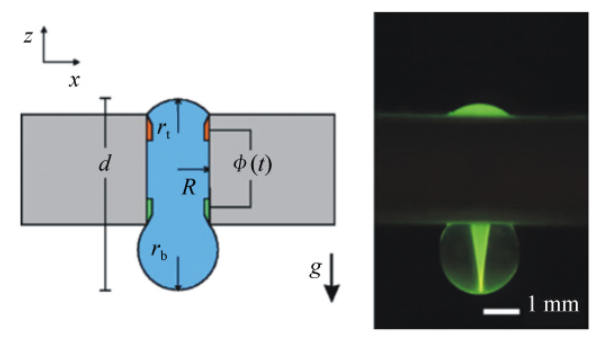
圖5 電化學活化液態透鏡示意圖
圖5展示了一種毛細管微透鏡,由兩個毛細管表面組成,用過量的自由表面液體填充毛細管孔,表面活性劑在電壓作用下會發生氧化還原反應,使一個毛細管表面相對于另一表面的表面張力發生變化。毛細管內液體曲率的改變將引起焦距的變化,而且這一過程是可逆的。該類鏡頭的焦距調節響應時間較長,且變化規律難以定量分析。
c.??基于介電泳技術的液態透鏡
介電泳效應指在非均勻電場的作用下,由于介質顆粒極化程度不同,導致正負電荷受力不均產生側向位移。
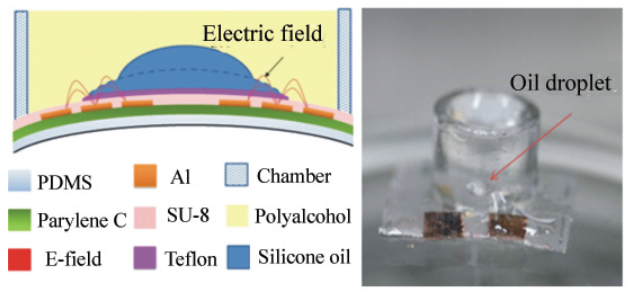
圖6 基于介點泳力作用的液態透鏡結構和器件
圖6展示了一種基于柔性襯底的介電泳力作用液體變焦鏡頭,該介電液體透鏡包含硅油和多元醇兩種密度相等的不導電液體。在柔性基底上表面沉積一層特氟龍(Teflon)薄膜,利用其潤濕性對硅油滴的空間位置進行限制,減小運動產生的摩擦力。同時,在環氧SU-8樹脂下表面布置一對環形同心電極,以產生非均勻電場。當施加電壓時,由于多元醇的介電常數比被包圍的硅油液滴的介電常數大,電場作用產生的介電泳力使液體向內擠壓變形,從而增大硅油液滴與基底的接觸角。該類透鏡通常需要設計加工復雜的電極結構,而且驅動電壓較高,調焦范圍相對較小。
d.??基于介電潤濕技術的液態透鏡
介質上電潤濕技術(EWOD)是目前運用廣泛的制造液體鏡頭的技術之一。
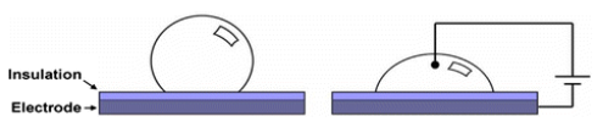
圖7 介電潤濕原理圖
該技術通過在液體和電極之間施加電壓,改變液滴及其接觸面的潤濕性,使得液滴和介質表面接觸角發生變化。液滴的接觸角變化與施加的電壓U之間的關系,可由 Young-Lippmann方程表示。液滴與介質間接觸角余弦值的改變不僅與電壓值變化有關,也受介電層厚度和介電常數變化的影響。圖7展示了加壓前后液滴接觸角變化情況。可見,當施加電壓時,液滴變形導致接觸角減小。
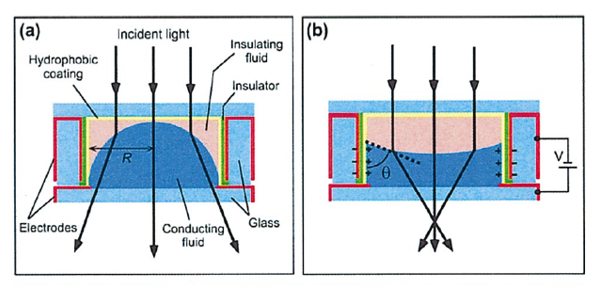
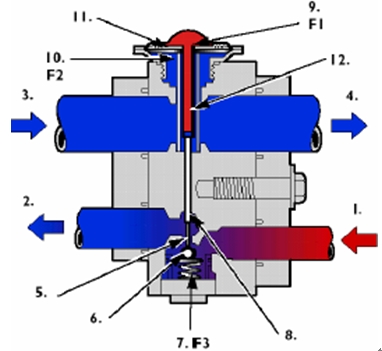
圖8 介電潤濕驅動的液態透鏡工作原理圖
介電潤濕液體透鏡的工作原理如圖8所示:在雙液體透鏡之中, 電壓加在電解液和金屬電極之間,相當于一個可變電容器。當施加外界電壓時,電容器兩端電壓升高,兩極板電量增多,在面電荷密度固定的條件下,只有使極板表面積增大,才能在絕緣層兩側積聚更多的電荷,水溶液開始加大與疏水層的接觸面積,即所謂的“減弱了疏水性能”。同時,由于容器內空間和液體體積均不變,電解液沿容器周圍液面上升,油會填補原本是電解液占用的空間,從而使兩種液體界面的弧度產生改變,最終達到改變透鏡焦距的目的。
2)? 物性控制式液體液態透鏡
物性控制式液體液態透鏡依靠鏡頭內填充介質材料本身的物理性質變化實現焦距調節,通過調節電壓來實現對介質材料的分子取向、表面張力、接觸角和潤濕性等參數的操控。
a.??基于靜電力驅動的液態透鏡
靜電力驅動情況下,通電電極由于電場作用產生相互作用力,施加于鏡頭填充液。圖9展示了一種由平面電極靜電驅動的液體變焦鏡頭。
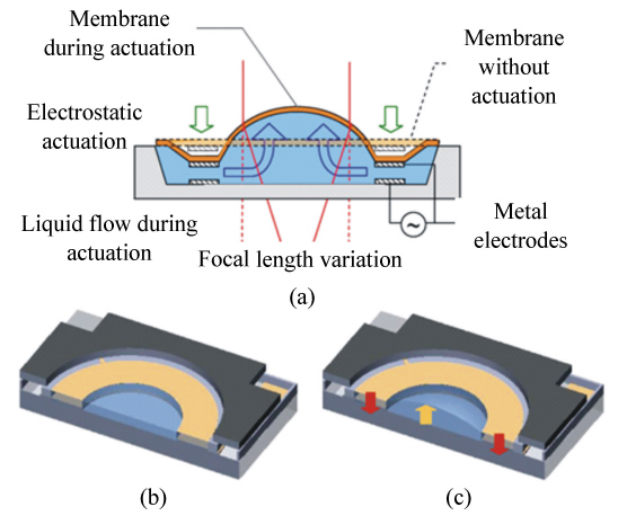
圖9 基于靜電吸引的液態透鏡 (a)透鏡的截面結構圖,(b)無電壓狀態,(c)有電壓狀態
鏡頭裝置通過彈性聚合物薄膜將高介電常數液體封裝在薄玻璃片上的腔體中。同時,分別在薄膜下表面和薄玻璃片上表面沉積環形金屬電極構成平行板靜電致動器。當施加電壓時,平行板電極由于靜電吸引相互靠近,腔內液體被擠向透鏡中心,改變了薄膜的曲率。該透鏡結構緊湊、驅動電壓低,可以利用MEMS制造工藝批量化生產。
b.??基于電磁力驅動的液態透鏡
利用電磁場與磁性材料、帶電導體和鐵磁流體的相互作用產生電磁力,直接或間接地作用于透鏡腔體內部填充液體。
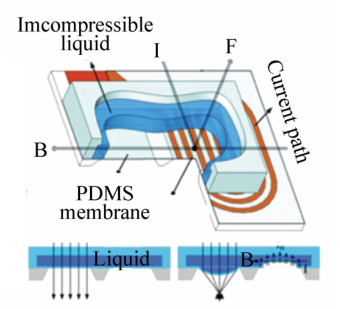
圖10?基于PDMS彈性薄膜與電磁微致動器集成的液態透鏡
圖10展示了一種由聚二甲基硅氧烷(PDMS)彈性薄膜與電磁微致動器集成的液體鏡頭,在電場和磁場的共同作用下,附著在薄膜上的帶狀金屬電極在洛倫茲力驅動下將引起薄膜均勻變形,并通過液體介質傳遞到透鏡腔體。該類鏡頭具有驅動電壓低,成像像差小等特點,但是在施加的大電流作用下電極產生的熱量會加速液體介質的蒸發,影響鏡頭成像性能的穩定性。
c.??基于壓力調節的液態透鏡
壓力調節式液體變焦鏡頭通過在鏡頭液體腔內充液、擠壓或改變孔徑等方式調節腔室壓力,使透鏡薄膜曲率或者介質材料折射率發生變化。
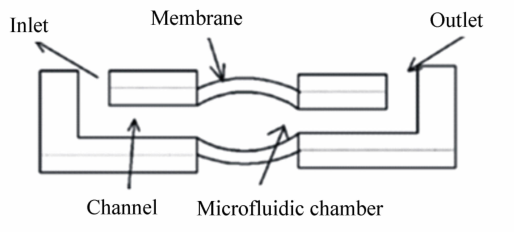
圖11 基于液壓控制的液態透鏡結構
圖11展示了一種液壓控制的液態鏡頭,該設計通過注入或抽取液體,改變裝置進出口壓力差值,實現雙凹和雙凸透鏡的轉換。鏡頭裝置具有結構簡單、調焦范圍大等優點,但是需要液壓泵或者注射器等為其提供驅動力。
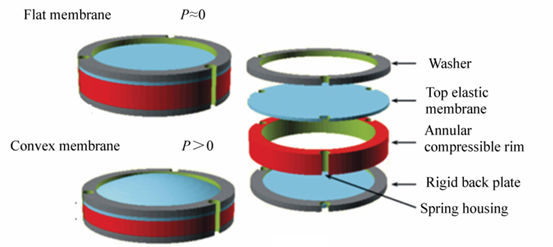
圖12 基于形狀記憶合金的液態透鏡
圖12展示了一種有形狀記憶合金驅動的液態透鏡,以形狀記憶合金彈簧為執行機構,設計的大光圈液體變焦透鏡,其利用形狀記憶合金彈簧控制壓縮環的變形,通過調節鏡頭孔徑實現變焦。
d.??基于環境響應的液態透鏡
環境響應式液體變焦鏡頭利用液體介質對溫度和振動等外部環境參數變化的響應,通過改變曲率或折射率調節焦距。
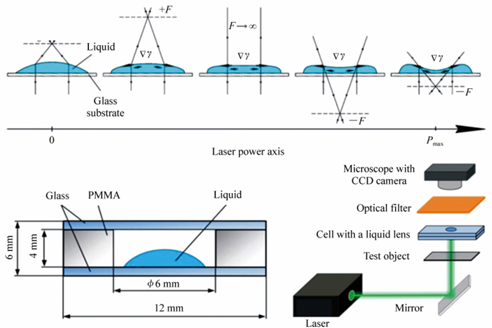
圖13 激光誘導的液態透鏡原理及實驗圖
圖13 展示了一種激光誘導的液態透鏡,用激光束加熱,使液滴從中心到邊緣進行熱毛細流動,從而改變液滴表面的局部曲率。通過調整激光束的功率,液滴可以作為聚焦透鏡或發散透鏡。該類透鏡具有制造成本低、加工簡單等優點,但是液體受熱后蒸發速度加快,影響成像的穩定性。
04 ? 應用
1)??消費電子
圖14 手機鏡頭結構示意圖
隨著消費電子設備的流行,各大公司開始著力于液態鏡頭的研究,近年來,液體鏡頭開始向手機應用滲透,2020年5月,華為的液體鏡頭專利曾一度引起轟動,今年3月,小米正式發布搭載液體鏡頭的小米 MIX。與傳統光學鏡片相比,液體鏡頭有著耗電量更低、體積更小;不需要活動部件和馬達,靜音,對焦速度更快范圍更廣等特點。
2)??顯微成像
在顯微鏡技術中,快速Z聚焦和圖像穩定性一直是一個難以權衡的問題,尤其是獲取三維信息(DFF)或計算具有擴展景深(EDOF)的圖像。目前的技術,如步進電機Z執行器或壓電,由于速度慢(步進電機Z致動器)或行程和振動小(壓電定位器),定位器正在影響生命科學業務的吞吐量。將這兩種不同的技術結合起來以克服這些問題一直是必要的瓶頸,增加了系統的復雜性和成本。可調液體透鏡提供了一種通用、緊湊且經濟高效的解決方案來克服這一挑戰。由于沒有平移力學,液體透鏡有可能在幾毫秒內聚焦,結合粗糙和精細的聚焦范圍,確保沒有振動。
3)??機器視覺
液態鏡頭材質是可改變形狀的光學液態材料,采用電控方式來改變曲率半徑,從而改變焦距。在高速高可變性的應用中,動態自動對焦能夠自動適用工作距離的變化。在機器視覺成像系統的一個標準的檢查系統中,不同高度的物體在快速移動的傳送帶上經過時被成像,液液態透鏡的引入克服了速度和景深的限制,重新聚焦到不同高度的時長僅僅需要毫秒。
4)??醫療檢測
由于醫用內窺鏡光學系統要求的物距范圍非常廣(3至100mm),普通光學系統在這樣大景深范圍內實現清晰成像難度較大,這就使得內窺鏡在使用狀態下的成像質量受到一定限制。同時,如何在物距不變的情況下實現局部范圍內病灶的圖像放大,也是醫生希望實現的功能。
然而,內窺鏡光學系統對系統尺寸及鏡片數量的要求非常嚴格,傳統光學系統很難實現變焦。因此又成為了液態透鏡的一個重要突破方向。
05 ? 總結與展望
液體變焦鏡頭無需復雜的機械部件,大大簡化了光學成像系統結構符合智能制造裝備的發展趨勢。隨著先進醫療儀器、智慧安防設備及智能制造裝備的快速發展,將對自適應液體變焦鏡頭提出更高的要求,促進液體變焦鏡頭在結構制造和應用等方面快速優化升級。
但同時,液體鏡頭還有很多要解決的難題,包括生產工藝、重力效應、像差缺陷以及材料等因素,能否大規模生產并替代傳統的光學鏡頭,仍需時間來驗證,但未來可期。
編輯:黃飛











 工商網監
工商網監
評論