 電子發燒友App
電子發燒友App


引言
調頻連續波( frequency modulated contin - uous wave,FMCW)雷達是一種通過對連續波進行頻率調制來獲得距離與速度信息的雷達體制系統,由于它具有無距離盲區、高分辨率和低發射功率等優點,近年來受到了人們的廣泛關注。
一、物位測量技術發展
物位測量技術經歷了結構上從機械式儀表向電子式儀表發展,以及工作方式上由接觸式向非接觸式發展的階段。
物位儀表的分類如圖1所示。

?
圖1中,前4種測量技術都屬于接觸式測量方法,第5種輻射法為非接觸測量方法。其中,直視法是指眼睛可以直接觀測到介質容量變化的一類方法;測力法是指通過被測介質對指示器或傳感器等目標施加外力來測量的方法;壓力法是由被測介質施加在測量探頭而產生壓力進行測量的方法;電特性法是利用被測介質的電特性進行測量的方法;輻射法采用電磁頻譜原理技術。
前4種方法需要測量儀器的全部或一部分部件與被測介質(固體或液體物料)相接觸才能達到測量的目的。從長期來看,物料粘附物及沉積物會對這些機械部件產生附著,當物料為腐蝕性或易產生水銹的介質時,對儀器精度的影響將更加嚴重。在工業生產中,對物位儀表最基本的要求是高精度和高可靠性,這就需要有應用范圍更大、精度更高的技術出現。
二、TOF測量原理
近幾年來,發展較快的是行程時間或傳播時間ToF ( time of flight )測量原理,又稱回波測距原理。它是利用能量波在空間中的傳播時間來進行度量的一種方法。能量波在信號源與被測對象之間傳遞,能量波到達被測對象后被反射并返回到探頭上被接收,屬于非接觸測距。
ToF 測量技術可以利用的能量波有機械波(聲或超聲波)、電磁波(通常為K波段或X波段的微波)和激光(通常為紅外波段的激光),相應的物位計稱為超聲波物位計、微波物位計和激光物位計。
天線發射器向距離為R被測量物料發射能量波,經被測量介質反射,由天線的接收器接收。能量波來回所經過的時間用td表示,可得到距離R與時間td 的關系為:td=2R/c (l) 式中:c為空氣中能量波的傳播速度,當以聲波為能量源時,c=340m/s;當以電磁波為能量源時,c=3×l08m/s。非接觸測量方法正是利用式(l)中距離R與時間td的關系,以不同的方式通過時間差td求得距離R的。
三、雷達物位計分類
盡管輻射法物位計都是采用ToF測量原理,但所采用的能量波不同時,信號的反射機理及在信號處理等方面都有很大的不同。以現在常用的超聲波和微波物位計為例,它們都采用ToF測量原理,都需要一個信號發生器和一個回波信號接收器,但兩種能量波在頻率范圍、反射方法以及對于包含距離信號的反射波的處理上都有比較大的差別。
3.1 超聲波物位計與微波物位計
電磁波的波段非常寬,從3kHz~3000GHz ,微波是指頻率為300MHz~300CHz的電磁波。在物位檢測中,微波使用的頻段規定在4~30GHz:之間,典型波段為5.8GHz、10GHz 、24GHz。5.8 GHz 的頻率屬于C波段微波;10GHz的頻率屬于X波段微波;24GHz的頻率屬于K波段微波。
聲波是機械波,頻率范圍為20Hz~20kHz ,因此,當聲波的振動頻率高于20kHz或低于20kHz時,我們便聽不見了。我們把頻率高于20kHz 的聲波稱為“超聲波”。
電磁波與聲波產生的原理是不同的,聲波是靠物質的振動產生的,在真空中不能傳播;而電磁波是靠電子的振蕩產生的,其本身就是一種物質,傳播不需要介質,能在真空中傳播。這兩種波在通過不同的介質時都會發生折射、反射、繞射和散射及吸收等現象,物位計正是應用這種特性來測量距離的。
超聲波物位計由聲納技術衍化而來,其安裝方式有頂部安裝和底部安裝兩種。早期的超聲物位計采用的也是液體導聲,超聲探頭安裝在料罐底部外,超聲波從底部傳入,經被測液體傳播到液面,反射后傳回探頭。超聲波傳播時間與液位的高低成正比。由于超聲波在各種被測介質中傳播的聲速不同,所以很難做成通用產品;且料罐底部(尤其是液體料罐的底部)安裝探頭的方法在實用中往往也有困難。因此,在實際工業過程中,利用空氣作為導聲介質的頂部安裝應用越來越廣泛。
超聲波物位計的聲波信號是在不同聲阻率(聲阻率等于物料密度px聲速。)的界面上反射的。由于空氣和物料的密度差別很大,所以它們的聲阻率相差也很大,聲波在空氣和物料的分界面上就像在鏡面上一樣反射,并由接收器接收回波信號。但是,由于超聲波是機械波,在空氣中傳播的波長小于17mm ,傳播速度受溫度影響較大,如當溫度為0℃ 時,聲速為331.6m/s當溫度為20 ℃ 時,聲速為 344m/s 。因此,必須進行溫度補償,且在測量揮發性液體時,由于空氣中含有的揮發組分不同,聲速也不同,也會產生較大的誤差。
與超聲波物位計相比,雷達物位計的微波信號是在不同介電常數的分界面上反射的。介電常數是表示絕緣能力特性的一個系數,以字母ε表示,單位為F/m ,它通常隨溫度和介質中傳播的電磁波的頻率變化而變化。介電常數越大,對電荷的束縛能力越強;介電常數越小,則絕緣性愈好。某種電介質的介電常數與真空介電常數之比εr稱為該電介質的相對介電常數。常見物料的相對介電常數如表1所示。

?
微波以光速傳播,速度幾乎不受介質特性的影響,傳播衰減也很小,約0.2dB/km 。回波信號強弱很大程度上取決于被測液面上的反射情況。在被測液面上的反射率除了取決于被測物料的面積和形狀外,主要取決于物料的相對介電常數εr。相對介電常數高,反射率也高,得到的回波強度高;相對介電常數低,物料會吸收部分微波能量,回波強度較低。對于普及型的雷達液位計,通常要求被測物料相對介電常數εr 〉4; 對于更低介電常數的物料,要求增設波導管來增強回波信號,或選用較復雜的雷達,通常測量下限為εr> 2。對于測量介電常數高或導電的物料時,有效量程要下降很多,如20m量程的雷達物位計,若用于測量煤粉,有效量程最多為7m對于測量介電常數低的塑料粒子等,測量效果也不好。
3.2 脈沖與調頻連續波雷達物位計
微波物位計按使用微波的波形可分為脈沖波和調頻連續波兩大類。
3.2.1 脈沖雷達物位計
脈沖雷達的發射原理比較簡單,即雷達向距離為 R 的目標發送一個高頻脈沖,微波遇到介質后被反射回來,測得發送與接收的延遲時間,利用式(1)即可求得距離。但是,由于其靠時間來計算數值,因此,需要對事件精確到幾+皮秒(1ps = 10-12s) 。
假設記錄時間的芯片最高精度為 50Ps ,按式(l) 可得到其測量誤差距離精度為:△R= △t×c=15mm, 即脈沖雷達如果僅靠時間來處理數據,其最高精度為15mm 。所以,早期脈沖雷達大都采用時間拓展的方法來進行時間的準確測量與記錄,外加多次測量求平均的辦法。但采用拓展時間以及平均法求值,其最終精度要達到5~10mm具有一定的難度。
3.2.2 調頻連續波雷達物位計
調頻連續波(FMCW)雷達的原理為發送具有一定帶寬、頻率線性變化的連續信號,再對接收到的連續信號進行快速傅里葉變換,通過發送與接收信號的頻率差來計算兩個信號的時間差,最后與脈沖波雷達物位計一樣,由時間差得到對應的距離值。FMCW雷達能夠獲取很高的精度,其精度主要取決于壓控振蕩器的線性度和溫漂。
FMcw 雷達通過發射頻率調制的連續波信號,從回波信號中提取目標距離信息。FMcw分為線性調頻和非線性調頻(如正弦波調頻)兩種。使用非線性調頻方式時,每個目標產生的差拍頻率不唯一,一般只適用于單目標的場合,如雷達高度計等;線性調頻方式適合于用FFT算法測量頻率,應用最廣。這種方式使每個目標產生的差拍信號都是單一頻率,但其對線性調頻的線性度要求很高,比較常用的調制波形是三角波和鋸齒波,物位儀表常用鋸齒波高頻方式。FMCW 雷達發射和接收信號的原理如圖2所示。

?
圖2中,實線為雷達天線發送信號ft;虛線為雷達接收信號fr;B為信號的帶寬。發射信號的調頻周期T要遠大于目標最大回波時延td,即信號由天線發送經物料反射,再由天線接收所經的時間td比信號期T要小得多。發送信號和接收信號由于時延引起頻率的變換它們的頻率差就是差頻信號,可用fif表示。顯然差額信號fif的大小正比于天線與目標間的距離R,即:
?
式中:c為光速,3×108m/s;T為信號周期,B為信號帶寬,均為已知參數。獲得差頻信號fif的值最簡單的方法是利用傅里葉變換方法,通過頻譜分析求得。
與脈沖雷達相比,調頻雷達抗干擾能力強,這使得它能夠運用于更多的環境,但其價格昂貴雷達的2~2.5倍左右。FMCW 雷達發射的是連續波脈沖雷達的(峰值)功率小很多。發射功率小具有以下優點:① 電源電壓大大降低,這對于用于油艙內液位測量系統的安全性非常重要;② 發射系統便于用固態器件實現,從而使得發射系統尺寸大大減小,可靠性提高;③ FMCW 雷達極寬的信號帶寬使其具有很高的距離分辨率和距離測量精度,以及較強的抗干擾性。
四、雷達料位計測量技術難點
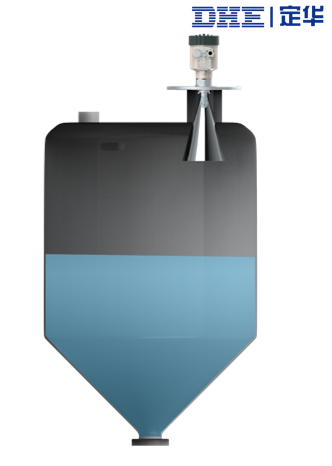
由于固態物料(如沙石、煤炭等)的料面都有一定的安息角,因此固態料面的測量基本上是利用波在粗糙表面的漫反射。形成漫反射的條件近似于:顆粒直徑〉1/6波長。則波長λ與頻率f的關系為: c=λf (3)可以算出它的波長為8.6mm , 對顆粒直徑為2mm 以上的物料都可形成良好的漫反射;而當c為光速3×l08m/s,采用X波段頻率為5.8GHz或6GHz 的微波物位計時,由式(3)可得波長約為52mm ,對于粒徑較小的顆粒狀物位,漫反射效果差,回波信號干擾嚴重。為改善測量性能,可提高發射信號的頻率,采用K波段(24GHz或26GHz),從而得到較好的回波信號。從雷達料位計的測量原理可知,雷達料位計是通過處理雷達波從探頭發射到介質表面,然后返回到探頭的時間來測量料位的。反射信號中混合有許多干擾信號,因此,對真實回波的處理和對各種虛假回波的識別技術就成為雷達料位計能否準確測量的關鍵因素。由于液面波動和隨機噪聲等因素的影響,檢測信號中必然混有大量噪聲 ,為了提高檢測的準確度,必須對檢測信號進行處理,盡可能消除噪聲。
調頻連續波雷達必須在發射的同時進行接收,如果采用同一天線進行發射和接收,必須有效地防止發射信號直接泄漏到接收系統,因此,可采用環行器隔離發射接收信號。為了保證測量精度的要求,還必須采取有效的措施保證發射信號頻率的穩定度和線性度。
五、結束語
近年來,微電子技術的滲入大大促進了新型物位測量技術的發展,新的測量技術促使物位測量儀表產品結構產生了很大變化。電池供電及無線雷達式物位儀表也開始在市場上出現。所有這些技術上取得的進步以及不斷下降的價格正推動著雷達式物位儀表的不斷增長。



















 工商網監
工商網監
評論