基于步進(jìn)電機(jī)驅(qū)動原理,對步進(jìn)電機(jī)驅(qū)動方式進(jìn)行分析,提出了基于西門子S7-1200系列PLC的步進(jìn)電機(jī)位置控制裝置的電氣系統(tǒng)硬件接線及軟件設(shè)計。通過測試,該裝置能對位置進(jìn)行精確控制及狀態(tài)監(jiān)控,在光伏發(fā)電追光系統(tǒng)中可用于光伏板的控制,也適用于PLC運(yùn)動控制教學(xué)實(shí)訓(xùn),在自動化裝置中有較好的推廣價值。
2023-10-23 14:38:16 49
49 
步進(jìn)電機(jī)的運(yùn)行要有一電子裝置進(jìn)行驅(qū)動,這種裝置就是步進(jìn)電機(jī)驅(qū)動器,它是把控制系統(tǒng)發(fā)出的脈沖信號,加以放大以驅(qū)動步進(jìn)電機(jī)。步進(jìn)電機(jī)的轉(zhuǎn)速與脈沖信號的頻率成正比,控制步進(jìn)電機(jī)脈沖信號的頻率,可以對電機(jī)精確調(diào)速;控制步進(jìn)脈沖的個數(shù),可以對電機(jī)精確定位。
2023-10-19 10:59:4230 
步進(jìn)系統(tǒng)=步進(jìn)驅(qū)動器+步進(jìn)電機(jī)。步進(jìn)電機(jī)由步進(jìn)驅(qū)動器來驅(qū)動,相當(dāng)于驅(qū)動電源,且它受外部的脈沖信號和方向信號控制(這里舉例是西門子PLC輸出脈沖),進(jìn)而控制步進(jìn)電機(jī)的旋轉(zhuǎn)角度和速度。
2023-08-25 11:15:10201 
plc作為一種工業(yè)控制計算機(jī),具有模塊化結(jié)構(gòu)、配置靈活、高速的處理速度、精確的數(shù)據(jù)處理能力、PLC對步進(jìn)電機(jī)也具有良好的控制能力,利用其高速脈沖輸出功能或運(yùn)動控制功能,即可實(shí)現(xiàn)對步進(jìn)電機(jī)的控制。對于
2023-08-07 08:09:36476 
plc作為一種工業(yè)控制計算機(jī),具有模塊化結(jié)構(gòu)、配置靈活、高速的處理速度、精確的數(shù)據(jù)處理能力、PLC對步進(jìn)電機(jī)也具有良好的控制能力,利用其高速脈沖輸出功能或運(yùn)動控制功能,即可實(shí)現(xiàn)對步進(jìn)電機(jī)的控制。
2023-08-02 10:05:54264 西門子200PLC步進(jìn)控制:使用200編程軟件,使用pls指令控制步進(jìn)電機(jī)。使用PLC向外發(fā)送脈沖,由脈沖來控制運(yùn)動,PLC分3種類型:晶體管(t),晶閘管(s),繼電器(r) ,驅(qū)動步進(jìn)電機(jī)PLC
2023-04-19 09:42:17 0
0 誰有控制步進(jìn)電機(jī)的程序,謝謝
2012-08-01 16:37:29
步進(jìn)電機(jī)是一種將電脈沖轉(zhuǎn)化為角位移的執(zhí)行機(jī)構(gòu)。當(dāng)步進(jìn)驅(qū)動器接收到一個脈沖信號時就驅(qū)動步進(jìn)電機(jī)按設(shè)定的方向轉(zhuǎn)動一
個固定的角度(稱為“步距角”),其旋轉(zhuǎn)以固定的角度運(yùn)行。可以通過控制脈沖個數(shù)來控制
2023-03-23 14:19:270 動作 ? ? ? ? 在該路徑控制程序段中,回字型運(yùn)動。涉及XY雙軸的交替關(guān)聯(lián)。? ?三、基于臺達(dá)觸摸屏程序進(jìn)行仿真 ?四、基于C#? GDI+ 繪制步進(jìn)電機(jī)動作路勁 ???????? 通過C#讀取PLC的數(shù)據(jù)請
2023-03-23 11:42:000 步進(jìn)電機(jī)是一種將電脈沖轉(zhuǎn)化為角位移的執(zhí)行機(jī)構(gòu)。當(dāng)步進(jìn)驅(qū)動器接收到一個脈沖信號時就驅(qū)動步進(jìn)電機(jī)按設(shè)定的方向轉(zhuǎn)動一
個固定的角度(稱為“步距角”),其旋轉(zhuǎn)以固定的角度運(yùn)行。可以通過控制脈沖個數(shù)來控制
2023-03-23 10:34:222 步進(jìn)電機(jī)的控制方式為開關(guān)控制,即沒有反饋裝置。例如某控制器(PLC)向步進(jìn)電機(jī)發(fā)送了800個脈沖,那么究竟該步進(jìn)電
機(jī)有沒有走對應(yīng)800個脈沖的距離或旋轉(zhuǎn)角度無法得知。
2023-03-22 14:19:172 一、控制要求 設(shè)計一個三相六拍環(huán)形分配器控制脈沖進(jìn)而控制步進(jìn)電機(jī)運(yùn)行。 該程序應(yīng)具有: 1. 電機(jī)正反轉(zhuǎn)控制 2. 轉(zhuǎn)速控制:快速(0.5s)、中速(1s)、慢速(2s) 3. 定步控制:執(zhí)行8步后
2023-03-22 11:19:421 PLC作為一種工業(yè)控制計算機(jī),具有模塊化結(jié)構(gòu)、配置靈活、高速的處理速度、精確的數(shù)據(jù)處理能力、PLC對步進(jìn)電機(jī)也具有
良好的控制能力,利用其高速脈沖輸出功能或運(yùn)動控制功能,即可實(shí)現(xiàn)對步進(jìn)電機(jī)的控制
2023-03-22 11:06:590 步進(jìn)電機(jī)步進(jìn)電機(jī)是將電脈沖信號轉(zhuǎn)變?yōu)榻俏灰苹蚓€位移的開環(huán)控制元件。
步進(jìn)電機(jī)收到一個脈沖,步進(jìn)電機(jī)走一個步距角。
在非超載的情況下,電機(jī)的轉(zhuǎn)速、停止的位置只取決于控制脈沖信號的頻率和脈沖數(shù)
2023-03-22 10:42:590 本文以西門子S7-1200系列PLC、步進(jìn)電機(jī)及西門子KTP700PN觸摸屏為研究對象,步進(jìn)電機(jī)控制為例,利用TIAPortal
V15.1編程軟件進(jìn)行硬件組態(tài)和軟件編程,實(shí)現(xiàn)了PLC以及觸摸屏
2023-03-22 10:05:5913 需要準(zhǔn)備設(shè)備: DC類型的PLC、步進(jìn)電機(jī)、控制卡、24v開關(guān)電源、電線若干
步進(jìn)電機(jī)連接步進(jìn)控制卡:首先檢查電機(jī)的AB項,將電機(jī)中的隨意兩對線進(jìn)行連接,并用力旋轉(zhuǎn)電機(jī)軸,如果不能旋轉(zhuǎn)則表 示為
2023-03-22 09:59:260 我們學(xué)習(xí)PLC課程上機(jī)實(shí)驗的時候,往往是用一個發(fā)光二極管代替步進(jìn)電機(jī),通過發(fā)光二極管的亮滅代表步進(jìn)電機(jī)正轉(zhuǎn)和反轉(zhuǎn),實(shí)際接線中往往出錯,今天就簡單介紹一下; 11.1 PLC型號的選擇我選擇的是三菱
2023-03-22 09:53:101 在不使用PLC、單片機(jī)的情況下怎么只接控制步進(jìn)電機(jī)呢?
讓步進(jìn)電機(jī)動起來需要有方向和脈沖,只要能夠收到脈沖信號,電機(jī)就能根據(jù)一定的脈沖數(shù)量旋轉(zhuǎn)一定的角度。
那么我們使用編碼器作為輸入元件,怎么來控制步進(jìn)電機(jī)呢。
2023-03-22 09:45:072 利用單片機(jī)實(shí)現(xiàn)對步進(jìn)電機(jī)的控制,編寫程序,用四路 I/O口實(shí)現(xiàn)環(huán)形脈沖的分配,控制步進(jìn)電機(jī)按固定方向連續(xù)轉(zhuǎn)
動。同時,要求按下“Positive(正轉(zhuǎn))”按鍵時,控制步進(jìn)電機(jī)正轉(zhuǎn);按下
2023-03-21 15:25:243 采用PLC實(shí)現(xiàn)對步進(jìn)電機(jī)的控制。完成驅(qū)動的接線和驅(qū)動器的參數(shù)配置后,即可對PLC編程實(shí)現(xiàn)電機(jī)的運(yùn)轉(zhuǎn)。這里以西門子S-200smart PLC運(yùn)用舉例。
2023-03-02 14:22:352610 
在工業(yè)控制領(lǐng)域,使用步進(jìn)電機(jī)作為運(yùn)動控制的執(zhí)行器件是非常常見的運(yùn)用場景。其控制方式簡單,電機(jī)成本低廉,可快速構(gòu)建一個高精度的定位控制系統(tǒng)。
2023-03-02 14:22:14451 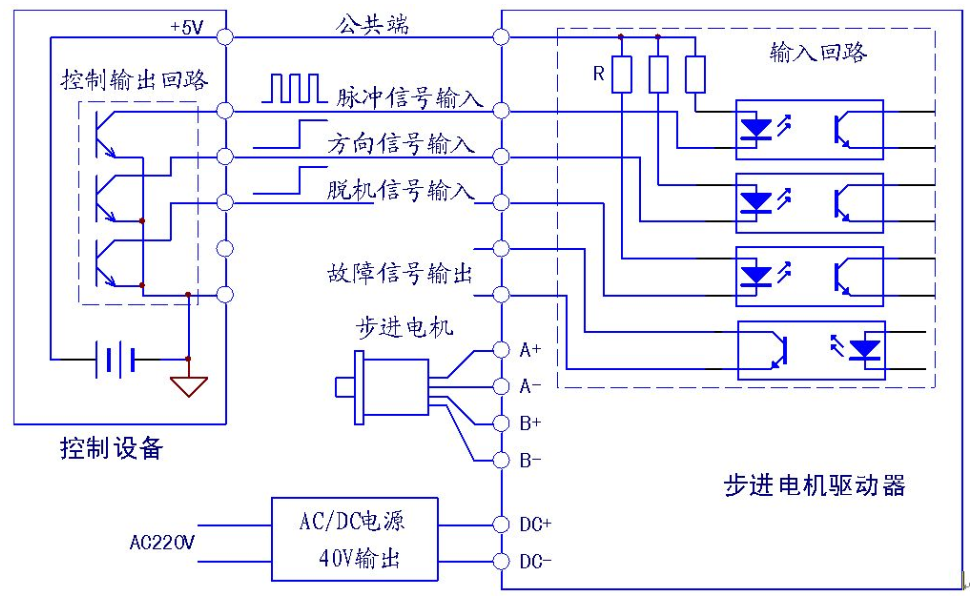
采用西門子TIA Portal V15編程軟件編寫運(yùn)動控制程序,實(shí)現(xiàn)PLC(S7-1200系列:CPU1214C DC/DC/DC )對步進(jìn)電機(jī)的控制,再通過編寫ModbusTCP程序,將控制地址
2022-11-08 10:48:283496 步進(jìn)電機(jī)的可編程控制器直接控制,可使組合機(jī)床自動生產(chǎn)線控制系統(tǒng)的成本顯著下降。文章介紹了用PLC控制步進(jìn)電機(jī)驅(qū)動的數(shù)控滑臺方法,伺服控制、驅(qū)動及接口以及步進(jìn)電機(jī)PLC控制的軟件邏輯。
2022-10-26 11:47:026382 本文是一篇綜合性非常強(qiáng)的文章,從PLC輸入輸出及步進(jìn)電機(jī)接線開始,到PLC運(yùn)動控制程序編寫,再到后續(xù)的ModbusTCP通信協(xié)議及上位機(jī)編程實(shí)現(xiàn)最終控制,涉及知識面比較廣,能夠讓我們很好地將所學(xué)知識結(jié)合起來。
2022-10-20 10:02:371192 三菱PLC(可編程邏輯控制器)編程實(shí)例項目例程
2022-05-13 17:14:30166 網(wǎng)焊機(jī)使用FX1N-40MT控制步進(jìn)電機(jī)的,PLC源碼程序。
2022-05-05 15:05:410 LabVIEW步進(jìn)電機(jī)控制相機(jī)程序完整資料
2022-01-18 14:17:2218 本文檔作備份用。摘 要: 設(shè)計了一種具有多模式的步進(jìn)電機(jī)控制裝置,本裝置基于STC的一款單片機(jī)STC89C52,軟件部分由C51編寫,包含啟停中斷程序、轉(zhuǎn)向中斷程序、步進(jìn)電機(jī)調(diào)速程序以及鍵盤信號
2021-11-23 16:22:5118 單片機(jī)控制步進(jìn)電機(jī)-單片機(jī)程序(avr)硬件線路連接圖見上一篇文章軟件:ICCV7 FOR AVR-寫程序Progisp-燒程序速度S曲線生成器(后續(xù)后單獨(dú)講解)-生成S曲線數(shù)組代碼硬件
2021-11-15 09:21:0421 的加速和減速的控制,還可以實(shí)現(xiàn)正反轉(zhuǎn)控制。同時顯示模塊能夠?qū)崟r顯示當(dāng)前步進(jìn)電機(jī)的速度和正反轉(zhuǎn)狀態(tài)。它的最大的創(chuàng)新不僅僅是因為可以控制步進(jìn)電機(jī)的速度,更在于它根據(jù)步進(jìn)電機(jī)的工作原理,通過程序計算出來了步進(jìn)電機(jī)的工作轉(zhuǎn)速
2021-06-07 09:11:3724 基于PLC步進(jìn)電機(jī)控制系統(tǒng)的設(shè)計說明。
2021-05-19 10:01:0792 51單片機(jī)控制步進(jìn)電機(jī)的C程序。
2021-05-17 09:28:189 C51控制步進(jìn)電機(jī)程序設(shè)計說明。
2021-03-30 09:59:2636 本文檔的主要內(nèi)容詳細(xì)介紹的是單片機(jī)控制步進(jìn)電機(jī)的源程序免費(fèi)下載。
2021-03-10 16:09:2536 介紹基于FPGA 的步進(jìn)電機(jī)控制器的設(shè)計, 在分析步進(jìn)電機(jī)的工作原理的基礎(chǔ)上, 給出了層次化設(shè)計方案與VHDL程序,并利用Quartus Ⅱ進(jìn)行了仿真并給出了仿真結(jié)果。它以FP GA 作為核心器件
2021-02-05 11:37:0026 經(jīng)常聽到眾多人說plc控制伺服電機(jī)運(yùn)行,那么也有人疑惑可以不可以控制步進(jìn)呢?答案是可以的,也需要配步進(jìn)電機(jī)驅(qū)動器。plc控制步進(jìn)電機(jī)其實(shí)在使用中有一個很大的特點(diǎn),就是在使用的時候?qū)?b style="color: red">步進(jìn)電機(jī)的也具有
2021-01-12 16:14:283007 plc作為一種工業(yè)操控核算機(jī),具有模塊化構(gòu)造、裝備活絡(luò)、高速的處理速度、準(zhǔn)確的數(shù)據(jù)處理才調(diào)、PLC對步進(jìn)電機(jī)也具有超卓的操控才調(diào),運(yùn)用其高速脈沖輸出功用或運(yùn)動操控功用,即可結(jié)束對步進(jìn)電機(jī)的操控。
2020-09-26 11:09:035996 本文檔的主要內(nèi)容詳細(xì)介紹的是GX developer三菱PLC實(shí)現(xiàn)步進(jìn)電機(jī)往返運(yùn)動的程序和免費(fèi)下載。
2020-08-31 08:00:004 本文檔的主要內(nèi)容詳細(xì)介紹的是步進(jìn)電機(jī)控制程序免費(fèi)下載。
2020-06-04 08:00:007 本文檔的主要內(nèi)容詳細(xì)介紹的是步進(jìn)電機(jī)控制PLC的程序免費(fèi)下載。
2020-05-26 08:00:0017 簡要介紹利用 PLC 控制步進(jìn)電機(jī)對執(zhí)行元件進(jìn)行自動分度, 重點(diǎn)介紹一種 PLC 控制步進(jìn)電機(jī)的分度算法, 可實(shí)現(xiàn) 360°內(nèi)轉(zhuǎn)角誤差為 0, 保證了精確分度, 并給出分度算法梯形圖。
2020-04-28 08:00:001 本文檔的主要內(nèi)容詳細(xì)介紹的是步進(jìn)電機(jī)控制的程序免費(fèi)下載。
2020-04-26 08:00:006 資源使用說明:
定時器:
■步進(jìn)電機(jī)控制器采用兩個定時器cputimer0 和 cputimer2;
■cputimer0 為步進(jìn)電機(jī)每一步的周期計數(shù),定時器的計數(shù)初值為0XFFFF,計數(shù)滿
2020-03-24 15:02:0012 步進(jìn)電機(jī)是一種很常見的動力元件,步進(jìn)電機(jī)可以很方便的由控制系統(tǒng)控制其速度與轉(zhuǎn)動方向。那么使用PLC如何控制步進(jìn)的速度與方向呢。
2020-02-16 22:37:5819287 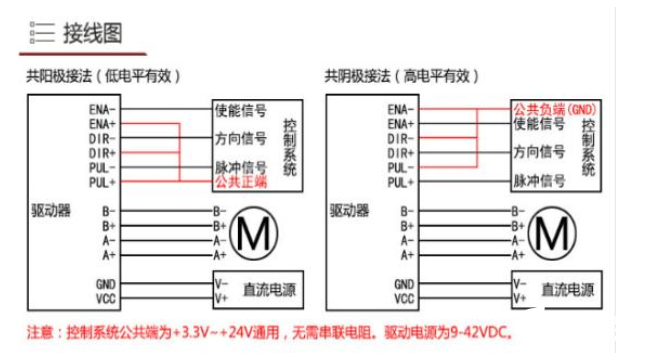
本文檔的主要內(nèi)容詳細(xì)介紹的是步進(jìn)電機(jī)的基礎(chǔ)知識和使用51單片機(jī)控制步進(jìn)電機(jī)的程序免費(fèi)下載。
2019-08-21 17:31:0049 本文檔的主要內(nèi)容詳細(xì)介紹的是S7-200、變頻器與觸摸屏的應(yīng)用PLC與步進(jìn)電機(jī)的運(yùn)動控制資料說明。一、運(yùn)動小車裝置介紹二、運(yùn)動控制與步進(jìn)電機(jī) 三、光柵尺四、基于PLC與步進(jìn)電機(jī)的小車自動往返控制五、基于PLC與步進(jìn)電機(jī)的位置閉環(huán)控制
2018-10-25 08:00:0043 和計算機(jī)技術(shù)的發(fā)展,步進(jìn)電機(jī)的需求量與日俱增,在各個行業(yè)的控制領(lǐng)域都將有廣泛應(yīng)用。PLC 作為一種工業(yè)控制計算機(jī),具有模塊化結(jié)構(gòu)、配置靈活、高速的處理速度、精確的數(shù)據(jù)處理能力、PLC 對步進(jìn)電機(jī)也具有良好的控制能力,利用其高速脈沖輸出功能或運(yùn)動控制功能,即可實(shí)現(xiàn)對步進(jìn)電機(jī)的控制。
2018-10-08 14:44:004216 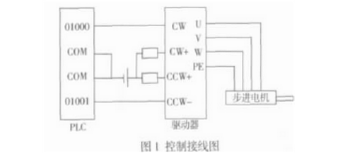
msp430控制步進(jìn)電機(jī)程序,共同學(xué)習(xí)。
2018-05-11 10:23:3424 的長短來具體控制步進(jìn)角來改變電機(jī)的轉(zhuǎn)速,從而實(shí)現(xiàn)步進(jìn)電機(jī)的調(diào)速,本文主要介紹基于單片機(jī)的步進(jìn)電機(jī)轉(zhuǎn)速控制設(shè)計詳解,文章最后附上程序。
2018-04-25 16:09:1223725 步進(jìn)電機(jī)由于體積精巧、價格低廉、運(yùn)行穩(wěn)定,在低端行業(yè)應(yīng)用廣泛,步進(jìn)電機(jī)運(yùn)動控制實(shí)現(xiàn)全閉環(huán),是工控行業(yè)的一大難題。主要問題有兩個,原點(diǎn)的不確定性和失步,目前,采用高速光電開關(guān)作為步進(jìn)系統(tǒng)的原點(diǎn),這個誤差在毫米級,所以在精確控制領(lǐng)域
2018-03-12 14:32:3123570 
近年來,人們更關(guān)注的是步進(jìn)電機(jī)的變頻特性。由于事物變化的不均勻性,定頻技術(shù)越來越顯示出它的局限性,而變頻技術(shù)扣能很好地適應(yīng)各種隨帆變化的系統(tǒng)。本文就是介紹采用PLC控制的步進(jìn)電帆的變頻特性,使其運(yùn)用
2017-11-08 16:12:407 及文化娛樂等各行各業(yè),隨著PLC性能價格比的不斷提高,其應(yīng)用領(lǐng)域不斷擴(kuò)大。本文主是根據(jù)設(shè)計要求,在了解步進(jìn)電機(jī)原理的情況下,結(jié)合實(shí)際應(yīng)用將PLC與步進(jìn)電機(jī)有效的結(jié)合起來,達(dá)到控制目的。 步進(jìn)電機(jī)低速時可以正常運(yùn)轉(zhuǎn),但若高于
2017-10-13 17:12:3216 本文主要闡述了五相十拍步進(jìn)電動機(jī)結(jié)構(gòu)原理,以及對步進(jìn)電機(jī)的調(diào)速和正反轉(zhuǎn)的研究。采用 PLC 基本邏輯指令和常用指令的方法對步進(jìn)電機(jī)調(diào)速正反轉(zhuǎn)控制。步進(jìn)電機(jī)是一種將脈沖信號轉(zhuǎn)換成直線位移或角位移的執(zhí)行
2017-10-13 16:36:2717 PLC 是廣泛應(yīng)用于工業(yè)自動化領(lǐng)域的控制器,PLC 及其有關(guān)的設(shè)備,都按易于與工業(yè)控制系統(tǒng)連成一個整體、易于擴(kuò)充功能的原則而設(shè)計。現(xiàn)在,PLC 功能得到了很大的擴(kuò)充和完善,比如為了配合步進(jìn)電機(jī)的控制
2017-10-13 15:42:0716 步進(jìn)電機(jī)的單片機(jī)控制仿真和源程序【DOC】
2017-01-24 17:30:1388 PLC的步進(jìn)電機(jī)控制系統(tǒng) 復(fù)雜的控制系統(tǒng)不僅I/O點(diǎn)數(shù)多,功能表圖也相當(dāng)復(fù)雜,除包括前面介紹的功能表圖的基本結(jié)構(gòu)外,還包括跳步與循環(huán)控制,而且系統(tǒng)往往還要求設(shè)置多種工作方式。
2016-08-24 16:52:028 控制步進(jìn)電機(jī)資料,感興趣的小伙伴們可以看一看。
2016-08-23 16:23:3219 步進(jìn)電機(jī)程序控制,感興趣的小伙伴們可以看看。
2016-07-21 17:33:2424 步進(jìn)電機(jī)控制程序液晶顯示程序,快來學(xué)習(xí)吧。
2016-05-12 16:25:3133 步進(jìn)電機(jī)控制,基于C51的步進(jìn)電機(jī)控制,快來下載學(xué)習(xí)吧
2016-01-13 14:12:0750 基于單片機(jī)的綜合應(yīng)用程序HMI人機(jī)界面控制步進(jìn)電機(jī)(新程序)【C語言】
2016-01-06 18:03:1647 51單片機(jī)控制TB6600驅(qū)動步進(jìn)電機(jī)程序 OK
2015-11-10 11:34:49467 步進(jìn)電機(jī)控制系統(tǒng) 步進(jìn)電機(jī)控制系統(tǒng) 步進(jìn)電機(jī)控制系統(tǒng)
2015-11-02 18:07:0152 plc控制步進(jìn)電機(jī)直接控制
2012-06-20 17:17:515317 步進(jìn)電機(jī)是一種感應(yīng)電機(jī),廣泛應(yīng)用在各種自動化控制系統(tǒng)中。電子發(fā)燒友網(wǎng)整理了步進(jìn)電機(jī)控制系統(tǒng)的一些控制原理及步進(jìn)電機(jī)驅(qū)動電路圖、步進(jìn)電機(jī)控制驅(qū)動程序等知識,較為翔實(shí)的介紹了步進(jìn)電機(jī)控制系統(tǒng)。
2012-06-18 16:52:56

提出了一種基于PLC的四相步進(jìn)電機(jī)控制的方法,介紹了控制系統(tǒng)的設(shè)計方案及其軟硬件的實(shí)現(xiàn)方法。實(shí)現(xiàn)對四相步進(jìn)電機(jī)的轉(zhuǎn)速控制、正反轉(zhuǎn)控制、以及步數(shù)控制。提出設(shè)計總體方案
2010-07-21 09:31:1761 本文介紹一種PLC間通信的步進(jìn)電機(jī)遠(yuǎn)程閉環(huán)控制的方案,主要介紹了系統(tǒng)構(gòu)成、主站和從站的程序編制,步進(jìn)電機(jī)的驅(qū)動實(shí)現(xiàn),該方案簡單、實(shí)用,適合用于作業(yè)與控制分離的場合
2010-07-20 15:12:4235 步進(jìn)電機(jī)控制程序ST
2010-01-09 15:19:176 控制步進(jìn)電機(jī)正反轉(zhuǎn)的實(shí)際應(yīng)用程序:/*這是一個控制步進(jìn)電機(jī)正反轉(zhuǎn)的實(shí)際應(yīng)用程序*/ /*選用的是三相步進(jìn)電機(jī)驅(qū)動器,p14口線用做步進(jìn)電機(jī)的脈沖控制*/ /*p13口線用做步進(jìn)電機(jī)的方向
2010-01-09 15:13:25146 本文介紹一種PLC 間通信的步進(jìn)電機(jī)遠(yuǎn)程閉環(huán)控制的方案,主要介紹了系統(tǒng)構(gòu)成、主站和從站的程序編制,步進(jìn)電機(jī)的驅(qū)動實(shí)現(xiàn),該方案簡單、實(shí)用,適合用于作業(yè)與控制分離的場
2009-08-15 09:28:4735 提出了一種基于PLC的四相步進(jìn)電機(jī)控制的方法,介紹了控制系統(tǒng)的設(shè)計方案及其軟硬件的實(shí)現(xiàn)方法。實(shí)現(xiàn)對四相步進(jìn)電機(jī)的轉(zhuǎn)速控制、正反轉(zhuǎn)控制、以及步數(shù)控制。提出設(shè)計總體方
2009-08-11 11:14:5089 8255A控制步進(jìn)電機(jī)
<實(shí)驗?zāi)康?gt;了解步進(jìn)電機(jī)的的基本控制原理,掌握控制步進(jìn)電機(jī)的轉(zhuǎn)速、轉(zhuǎn)向的程序設(shè)計方法。<實(shí)驗內(nèi)
2009-06-28 00:02:405150 步進(jìn)電機(jī)的PLC直接控制
步進(jìn)電機(jī)的可編程控制器直接控制,可使組合機(jī)床自動生產(chǎn)線控制系統(tǒng)的成本顯著下降。文章介紹了用PLC控制步
2009-06-19 14:09:032755 
適用PLC使用的步進(jìn)電機(jī)控制驅(qū)動器
本文介紹了一種新型步進(jìn)電機(jī)控制驅(qū)動器。該驅(qū)動器充分利用了單片機(jī)軟件控制靈活和PLC的ΔC門控制
2009-06-18 14:34:402447 
本文主要說明四相八拍中步進(jìn)電機(jī)的PLC編程控制。
2009-04-02 16:12:0532 本文介紹了步進(jìn)電機(jī)的工作原理和控制原則。
2009-04-02 14:27:4839 步進(jìn)電機(jī)具有控制簡單、定位準(zhǔn)確等特點(diǎn)。
2009-04-02 11:03:1156 單片機(jī)驅(qū)動步進(jìn)電機(jī)程序
NS-6型實(shí)驗板驅(qū)動步進(jìn)電機(jī)
控制輸出為P1口
由
2009-03-18 15:36:1211471 步進(jìn)電機(jī)控制程序(PLC控制)
2008-10-10 14:35:0265
步進(jìn)電機(jī)控制(含原理圖和程序)
2008-10-09 15:45:49238 步進(jìn)電機(jī)的PLC控制方法
一、引言 隨著微電子技術(shù)和計算機(jī)技術(shù)的發(fā)展,可編程序控制器有了突飛猛進(jìn)的發(fā)展,其功能已遠(yuǎn)遠(yuǎn)超出了邏輯
2008-10-09 15:14:457180 
實(shí)驗 步進(jìn)電機(jī)自動控制一、實(shí)驗?zāi)康?nbsp; 1.掌握用PLC控制步進(jìn)電機(jī)的方法。
2008-09-30 13:16:041424 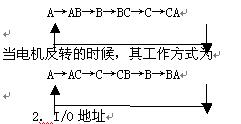
uln2803步進(jìn)電機(jī)的控制原理電路圖和源程序 步進(jìn)電機(jī)的控制原理和程序 選自北航
2008-08-28 15:48:069751 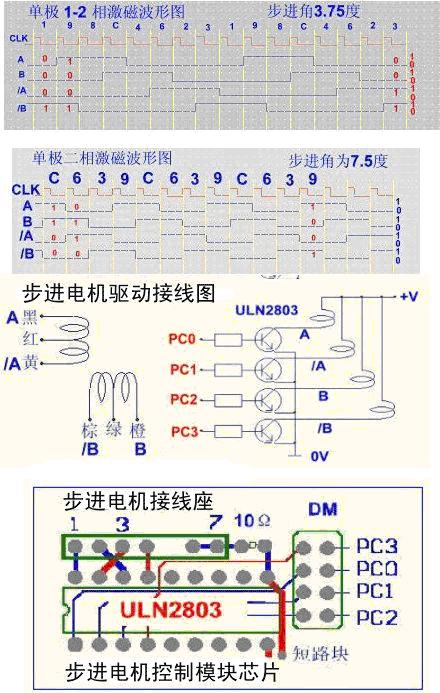
plc步進(jìn)電機(jī)原理圖
PLC選用日本松下FP0 PLC,共8點(diǎn)輸入(X0~X7),8點(diǎn)輸出(Y0~Y7),主要控制主電機(jī)Motor1
2008-05-22 11:49:579153 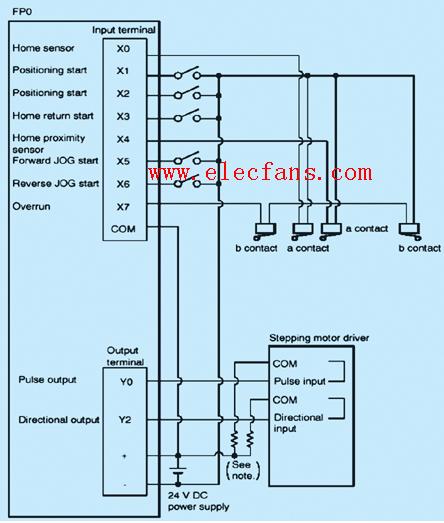
步進(jìn)電機(jī)工作原理與編程方法和控制源程序
本文介紹了步進(jìn)電機(jī)的工作原理與編程方法,以及例出
2008-05-22 09:13:48314
 電子發(fā)燒友App
電子發(fā)燒友App











 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論