進行早期應用目標噪聲估算時需要考慮多個潛在的誤差源。在此過程中需要考慮的 三個常見陀螺儀特性其固有噪聲、線性振動響應和對準誤差。 圖 1的簡單模型顯示了會影響各誤差源評估的幾個特性:噪聲源、傳感器響應和濾波。此模型給出了對這些特性進行頻譜分
2017-10-23 10:57:49 12412
12412 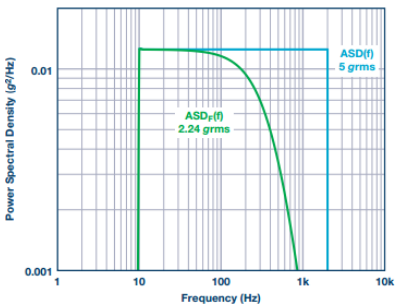
簡介對于在反饋環(huán)路中采用MEMS慣性測量單元(IMU) 的高性能運動控制系統(tǒng),傳感器對準誤差常常是其關鍵考慮之一。對于IMU中的陀螺儀,傳感器對準誤差描述各陀螺儀的旋轉(zhuǎn)軸與系統(tǒng)定義的"
2018-10-17 10:39:42
簡介對于在反饋環(huán)路中采用MEMS慣性測量單元(IMU) 的高性能運動控制系統(tǒng),傳感器對準誤差常常是其關鍵考慮之一。對于IMU中的陀螺儀,傳感器對準誤差描述各陀螺儀的旋轉(zhuǎn)軸與系統(tǒng)定義的"
2019-10-16 08:00:00
:噪聲源、傳感器響應和濾波。此模型給出了對這些特性進行頻譜分析所需的基準。圖1.陀螺儀噪聲源和信號鏈傳感器固有噪聲傳感器固有噪聲代表的是陀螺儀在靜態(tài)慣性和環(huán)境條件下運行時其輸出中的隨機振動。MEMS
2018-10-22 16:44:26
:噪聲源、傳感器響應和濾波。此模型給出了對這些特性進行頻譜分析所需的基準。圖1.陀螺儀噪聲源和信號鏈傳感器固有噪聲傳感器固有噪聲代表的是陀螺儀在靜態(tài)慣性和環(huán)境條件下運行時其輸出中的隨機振動。MEMS
2018-11-01 11:15:18
MEMS陀螺儀介紹
2019-08-28 13:00:59
MEMS陀螺儀介紹
2020-05-14 09:31:29
本帖最后由 eehome 于 2013-1-5 09:52 編輯
MEMS陀螺儀的原理與應用優(yōu)勢分析
2012-08-14 22:49:36
MEMS陀螺儀的簡單校準
2016-08-17 11:53:03
Mark Looney對于采用MEMS加速度計和陀螺儀的工業(yè)系統(tǒng)而言,優(yōu)化帶寬可能是關鍵考慮因素。這代表著精度(噪聲)與響應時間之間的一種經(jīng)典權衡。雖然多數(shù)MEMS傳感器制造商都會給出典型帶寬指標
2018-10-24 10:42:31
電子器件中使用的傳感器處理導致的。這可能導致通過傳感器信號路徑的相位相關誤差波動增加,特別是在卡爾曼濾波器中。MEMS IMU的可用帶寬為330 Hz,采用嵌入式的可調(diào)濾波系統(tǒng),提供合理平衡的方法,最大
2018-10-18 10:55:34
用那種型號的單片機和mems陀螺儀配合使用?謝謝大神指導我這位小學生
2017-03-21 20:05:49
MEMS陀螺儀也稱電子式陀螺儀,就是一塊芯片。 Iphone 4上的陀螺儀就是這種,主要作用是在GPS沒有信號時,通過陀螺儀的作用仍然能夠繼續(xù)精確導航。MEMS陀螺儀即硅微機電陀螺儀,絕大多數(shù)
2018-10-23 10:57:15
,如此等等。需要注意的是,電容和電感也有誤差。但這些誤差通常可以忽略不計,在這類直流分析里并無多大的價值。另外,這些器件實際上是無功器件,對濾波和帶寬容差的影響最大,本文的直流分析里同樣沒有考慮這一點
2018-11-01 11:36:23
的疑問時,了解它們?nèi)匀皇怯杏玫摹ATLAB"fdatool"命令可啟動濾波器分析和設計軟件包,幫助設計和分析系統(tǒng)FIR濾波器實施。慣性頻率響應測試方法在陀螺儀中測試頻率響應的最直接
2019-12-30 08:00:00
的監(jiān)控、陀螺儀運行狀態(tài)分析等,建立陀螺儀壽命預測模型和可靠性評估方法,以期研究出基于部分壽命周期(如10%)試驗數(shù)據(jù)的陀螺儀可靠性評估方法。為此,結合有關課題,以動力調(diào)諧陀螺儀為例,研制陀螺儀壽命試驗測試
2019-06-04 06:37:56
MEMS的工作原理和建模機制。典型MEMS傳感器的檢測部分行為就像是一個二階集總式質(zhì)量塊(阻尼器)彈簧機械系統(tǒng),具有單一的諧振頻率,其傳遞函數(shù)如下: 其中Fin(s)是輸入的力(在使用陀螺儀時是科里奧利力
2018-12-05 15:12:05
一種AMR磁羅盤的誤差建模與校準方法
2016-08-17 12:10:13
已經(jīng)有很多大佬介紹過了MPU6050的協(xié)議、數(shù)據(jù)處理方式、濾波算法,所以這部分就不再復述了,本篇主要是針對看不懂長篇大論的小白的簡易上手的方法。首先呢還是得簡單介紹下什么是陀螺儀:MPU-60X0
2022-02-10 07:24:32
MEMS陀螺儀提供了測量旋轉(zhuǎn)角速度的一種簡單方法,其封裝很容易連接印刷電路板,因此被廣泛用于許多不同類型的運動控制系統(tǒng)中作為反饋檢測元件。在這種類型的功能中,角速度信號(MEMS陀螺儀輸出)中的噪聲
2017-08-12 15:38:23
。關鍵詞:FIR,DSP,數(shù)字濾波器中圖分類號:TN7131. 引言數(shù)字濾波器在數(shù)字通信、語音圖象處理、譜分析、模式識別、自動控制等領域得到了廣泛的應用。相對于模擬濾波器,數(shù)字濾波器沒有漂移,能夠處理低頻
2008-05-14 23:30:12
利用高通濾波來消除積分過程中的偏置誤差。圖3. 角向隨機游動 (ADIS16460)。回過頭看圖2中的應用示例,將公式1和公式2結合便可把重要標準(檢查表面上的物理失真)與MEMS陀螺儀數(shù)據(jù)手冊通常會
2018-10-18 11:22:22
基于MEMS的加速度計設備是如何工作的?基于MEMS的陀螺儀設備是如何工作的?
2021-11-12 06:59:40
MEMS陀螺儀信號中的常見噪聲源評估MEMS陀螺儀信號中常見噪聲源的簡單流程
2021-03-08 06:17:12
什么影響了運動控制系統(tǒng)的關鍵性能標準?采用MEMS陀螺儀的低噪聲反饋控制設計
2021-03-11 07:01:52
中,一般是基于薩格納克(Sagnac)效應的陀螺。實際上,這幾種傳感器更準確的叫法應該是:角速度傳感器。但由于各種原因,現(xiàn)在一般都叫陀螺儀。結合成本和測量方法,一般選用 MEMS 陀螺儀。獲取旋轉(zhuǎn)
2018-10-24 10:23:31
集成正交安裝的高精度MEMS陀螺儀和正交安裝的高精度MEMS加速度計,內(nèi)置全溫零位誤差補償、安裝正交誤差補償、非線性誤差補償和g值敏感誤差補償?shù)榷喾N校準算法,采用雙排14針插針通過UART TTL通訊
2024-01-18 13:46:16
數(shù)學建模方法及其應用 韓中庚系統(tǒng)的分析了數(shù)學建模的方法
2013-09-05 15:15:10
本文基于某車型門窗控制器(DCM:Door Control Module)的PCBA提出一種有限元分析中PCBA的簡化建模方法,并進行有限元仿真模態(tài)分析。通過仿真模態(tài)分析結果與試驗模態(tài)分析結果對比,驗證所提出的簡化建模方法計算結果的準確性。
2021-04-19 06:20:44
了新的要求如高精度、高采樣頻率等。為使MEMS陀螺能在高頻率下工作,數(shù)字化電路就需要具備高采樣頻率,而目前MEMS陀螺的數(shù)字化主要是通過采用嵌入式現(xiàn)場可編程門陳列(FPGA)、數(shù)字信號處理器(DSP
2018-11-08 16:22:22
的疑問時,了解它們?nèi)匀皇怯杏玫摹ATLAB"fdatool"命令可啟動濾波器分析和設計軟件包,幫助設計和分析系統(tǒng)FIR濾波器實施。慣性頻率響應測試方法在陀螺儀中測試頻率響應的最直接
2018-10-17 09:54:54
振。 本文介紹了MEMS慣性傳感器(例如陀螺儀和加速計)如何幫助人或機器克服空間定向障礙。文章介紹了外力和運動對系統(tǒng)工作的影響,以及元件布局和安裝條件(空間關系)對MEMS慣性傳感器性能的直接影響。系統(tǒng)配置
2018-11-12 15:38:15
MEMS陀螺儀是如何工作的?
2021-03-18 06:48:50
論述了微機電系統(tǒng)(MEMS)器件縮減模型的建立是進行MEMS系統(tǒng)級模擬的關鍵。論證了基于線性正交振型建立MEMS器件縮減模型是一種有效的方法,導出了MEMS器件動態(tài)縮減模型的微分方
2009-05-28 11:19:06 17
17 MEMS單軸陀螺儀芯片利用作用在旋轉(zhuǎn)物體上的科里奧利力。高Q值和相對靈敏度的壓電單晶通過采用,雖然體積小,但在振動型中實現(xiàn)了最高的輸入/輸出靈敏度比。
2022-11-21 13:24:32
各種隨機噪聲是激光陀螺誤差的主要來源;設計了基于激光陀螺漂移數(shù)據(jù)時間序列模型的卡爾曼濾波器,對激光陀螺漂移數(shù)據(jù)進行了濾波,并采用Allan方差法分析了濾波結果;結果表
2009-07-07 15:13:5032 慣性器件誤差補償技術對提高捷聯(lián)慣導系統(tǒng)的導航精度具有十分重要的意義,而誤差補償?shù)年P鍵在于誤差模型的辨識。本文探討將Elman 神經(jīng)網(wǎng)絡應用于慣性器件誤差建模中,詳細介
2009-07-09 15:34:597 共聲學極點/零點(CAPZ)逼近是頭相關傳遞函數(shù)(HRTF)建模的一種高效方法,與極零點模型相比,它可以用更少的參數(shù)表示HRTF。傳統(tǒng)的CAPZ 模型參數(shù)估計方法是基于最小均方誤差準則,而
2009-11-24 15:33:5815 本文介紹了一個自由轉(zhuǎn)子陀螺的漂移誤差模型識別系統(tǒng)。該系統(tǒng)在實現(xiàn)數(shù)據(jù)采集的基礎上采用擴展卡爾曼濾波算法進行模型參數(shù)的識別,在擴展卡爾曼濾波計算中采用了改進的格
2009-12-19 14:59:088 有源濾波器中數(shù)字低通濾波器的設計及其DSP實現(xiàn)摘要:介紹了基于瞬時無功功率理論的ip iq 諧波檢測方法及對低通濾波器的要求,分析討論了數(shù)字低通濾波器的類
2010-05-13 17:19:1890 ST mems陀螺儀
基于ST專有的MEMS技術的優(yōu)勢和世界
2008-09-23 10:41:202137 中國自己的MEMS陀螺儀誕生
深迪半導體,日前發(fā)布了旗下第一款陀螺儀產(chǎn)品-- SSZ030CG,這標志著第一款具有中國自主知識產(chǎn)權的商用 MEMS (微機電)陀螺儀誕生。
2009-12-07 09:05:401337 陀螺儀能夠測量沿一個軸或幾個軸運動的角速度,而MEMS加速計則能測量線性加速度,因此這兩者是一對理想的互補技術。事實上,如果組合使用加速計和陀螺儀這兩種傳感器
2010-12-16 09:03:131080 光纖陀螺 漂移具有弱非線性和弱時變的特點。為了更準確的描述這種特性,介紹了非平穩(wěn)時間序列的DDS建模方法,并對光纖陀螺隨機誤差進行建模。通過對建模結果的脈沖響應分析,表
2011-06-08 15:25:1525 基于可重用IP(Intellectual Property)的設計方法為微機電系統(tǒng)( MEMS )系統(tǒng)級建模與仿真技術提供了新的思路,有望成為未來的主流。它將MEMS分解為梁、質(zhì)量塊、可變電容器等多個功能結構部件
2011-08-23 16:07:140 介紹了基于DSP技術的開環(huán)光纖陀螺。開環(huán)光纖陀螺以效應為基礎, 是一種新型的全固態(tài)陀螺儀, 由于其具有潛在的良好的性價比, 與數(shù)字信號處理芯片DSP接口簡單等優(yōu)點而倍受青睞, 一經(jīng)
2011-09-13 14:27:5841 針對在陀螺控制過程中陀螺基準信號頻率和相位角測量不準確,從而導致陀螺控制過程中定位不準確,產(chǎn)生漂移的難題,研究了一種基于DSP + FPGA 的陀螺控制方法。利用FPGA 進行基準信號頻率
2011-09-13 14:30:1129 為了抑制動力調(diào)諧陀螺的隨機漂移, 采取時間序列分析的方法, 分析了扔小型動力調(diào)諧陀螺儀輸出數(shù)據(jù)的平穩(wěn)性,建立了其隨機漂移的自回歸求和滑動平均, 模型。以所建模型作為狀態(tài)方程
2011-09-13 17:14:3431 針對衛(wèi)星定位信息誤差形成的原因和組成,分析了幾何精度因子在誤差形成中的影響,在對誤差分析的基礎上提出了一種誤差處理的數(shù)學模型,采用卡爾曼濾波的方法對誤差進行處理。實驗
2011-11-04 11:25:0271 深迪半導體(上海)有限公司正式發(fā)布其首款三軸微機電(MEMS)陀螺儀產(chǎn)品,ST200G
2012-06-06 18:07:441447 MEMS陀螺正交誤差分析理論及分析,適用于初學者學習
2015-12-08 09:53:111 本文針對提高低精度微陀螺精度的問題展開研究,基于陀螺陣列的虛擬陀螺技術,利用濾波補償算法,將多個具有相似特性的低精度陀螺組成陀螺陣列,提出改進的卡爾曼濾波算法將多個陀螺的輸出進行數(shù)據(jù)融合,構成虛擬
2015-12-28 09:56:144 MEMS微陀螺研究與發(fā)展述評,有需要的下來看看。
2016-12-17 16:37:587 基于DSP的MEMS陀螺去噪算法研究,下來看看。
2016-12-17 16:33:397 基于磁強計和MEMS陀螺的彈箭全姿態(tài)探測
2016-12-17 16:33:3910 基于隨機平均法的MEMS陀螺自適應控制設計
2016-12-17 16:33:399 Sagnac式光纖電流互感器的光波偏振特性建模及誤差特性分析_孫健
2016-12-31 14:45:090 MEMS加速度計的溫度誤差建模及補償_秦麗
2017-01-12 18:09:582 基于濾波的SAR影像去噪方法分析_賈偉潔
2017-03-16 10:57:060 基于ARMA模型和狼群算法的陀螺隨機漂移建模研究_來凌紅
2017-03-19 19:07:173 基于九軸MEMS定位系統(tǒng)誤差分析與補償算法研究_張港
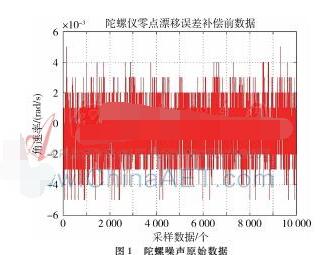
2017-03-19 19:28:034 詳細介紹了陀螺零漂的方法
2017-10-14 09:27:3210 光纖陀螺信號處理電路中FPGA與DSP的接口方法研究
2017-10-20 08:40:252 是很高,要想大范圍應用必須對MEMS陀螺儀的信號進行處理。 本文選用TI公司的TMS320VC33作為MEMS陀螺儀信號處理平臺的核心芯片,同時引入DSP/BIOS實時操作系統(tǒng)提供的多任務處理機制,在對陀螺儀信號進行數(shù)據(jù)采集的間隙同時對先采集來的信號數(shù)據(jù)進行處理
2017-10-26 15:27:059 ,而這些漂移量是非線性、非穩(wěn)定的,使得測量數(shù)據(jù)中存在較大誤差。 常用的陀螺儀信號降噪方法有卡爾曼濾波、短時傅里葉變換、小波變換等。其中,卡爾曼濾波是基于建立線性模型,然而線性模型對于非穩(wěn)定、非線性漂移信號并不是很有
2017-11-01 09:43:544 、等導航系統(tǒng)中具有廣泛應用。由于目前微慣性器件的精度相對較低,因此其標定、誤差建模與補償研究對于提高其精度至關重要。 陀螺是敏感殼體相對慣性空間做角運動的裝置,陀螺儀即是能白主地測量物體角速度或角位移的器件。陀螺儀類型
2017-11-05 11:25:145 三軸陀螺儀也叫“微機械陀螺儀”,而“微機械陀螺儀”也可稱作“MEMS陀螺儀”,即同時測定6個方向的位置,移動軌跡,加速。
2017-12-01 16:17:2314565 
MEMS陀螺儀對微機械加工工藝具有高度的敏感性,加工工藝偏差、加工應力以及可靠性等對MEMS陀螺儀的成品率至關重要。整個微機械加工工藝流程是實現(xiàn)MEMS陀螺儀長期穩(wěn)定工作的基礎,因此必須加強微機械加工工藝過程的控制。
2018-06-13 15:14:001608 MEMS陀螺儀信號的處理平臺的硬件系統(tǒng)應該包括以下幾個部分:DSP模塊,數(shù)據(jù)采集模塊,上位機通信模塊和JTAG調(diào)試接口模塊。數(shù)據(jù)采集模塊由兩部分組成:6路16位模/數(shù)轉(zhuǎn)換器ADS8364和同步時序
2018-04-12 12:10:002001 
進行滑動扣除均值方法來抑制直流分量,利用滑動濾波算法抑制加速度計高頻噪聲,引入互補濾波算法將預處理后的陀螺儀和加速度計信號進行融合,得到更加準確穩(wěn)定的角度測量值,分析了融合算法中加權因子與濾波頻率特征之間的關系。
2018-03-29 14:07:004286 
光纖陀螺儀(FOG)以前曾經(jīng)是環(huán)形激光陀螺儀(RLG)等其他技術的低成本替代品,現(xiàn)在該技術面臨著新的競爭。微機電系統(tǒng)(MEMS)陀螺儀開始搶奪傳統(tǒng)FOG應用的市場份額。具體來說,天線陣列穩(wěn)定、農(nóng)業(yè)機械控制、常規(guī)車輛導航成為MEMS和FOG對峙的戰(zhàn)場。
2018-02-24 17:24:278463 
單軸硅微MEMS角速率陀螺PA-ARG系列 1. 單軸硅微MEMS角速率陀螺PA-ARG 簡介 : PA-ARG系列角速率傳感器(陀螺),由西安精準測控自行研制,是用來測量角速率的無旋轉(zhuǎn)馬達的固態(tài)
2018-04-03 10:33:583305 
本視頻是ADI公司MEMS陀螺儀和同類陀螺儀產(chǎn)品的對比演示,比較兩者對錯誤輸出激勵的響應。可以看出,我們的結果新款陀螺儀具有高抗振動、抗沖擊性和抗線性加速度特性。
2018-06-03 01:47:003404 MEMS陀螺儀也稱電子式陀螺儀,就是一塊芯片。 Iphone 4上的陀螺儀就是這種,主要作用是在GPS沒有信號時,通過陀螺儀的作用仍然能夠繼續(xù)精確導航。
2018-07-30 11:21:3512905 軸對此漂移最為敏感。俯仰(姿態(tài))和滾動軸的相當一部分陀螺儀漂移可以在IMU內(nèi)部予以消除,即利用加速度計的反饋結果監(jiān)控相對于重力的位置。在IMU內(nèi)部利用低通或卡爾曼濾波器對陀螺儀輸出進行濾波,也是廣泛采用的消除部分漂移誤差的方法。
2018-09-07 14:20:276339 但是MEMS陀螺儀(gyroscope)的工作原理不是這樣的,因為要用微機械技術在硅片襯底上加工出一個可轉(zhuǎn)動的結構可不是一件容易的事。MEMS陀螺儀利用科里奧利力——旋轉(zhuǎn)物體在有徑向運動時所受到的切向力。下面是導出科里奧利力的方法。有力學知識的讀者應該不難理解。
2019-03-08 14:47:285260 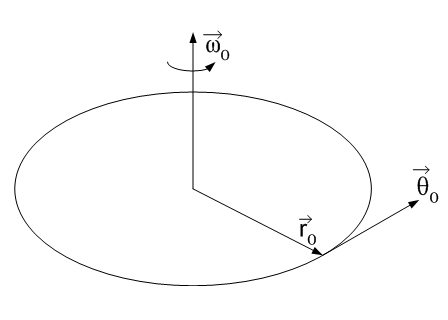
MEMS 陀螺儀的基本工作原理是通過科里奧利力來實現(xiàn)的,演示文稿中利用生動的動畫講述了這一原理,并介紹了為什么工業(yè)級的陀螺儀要采用差分甚至是四核的設計結構。當然,MEMS 陀螺儀的設計架構中還用到了MEMS加速度計的基本設計單元。
2019-07-31 06:18:004029 本陀螺儀演示視頻介紹2個ADI MEMS陀螺儀(ADXRS800、ADXRS450)和2個同類陀螺儀產(chǎn)品。可以看到每個陀螺儀對施加的旋轉(zhuǎn)速率所做出的響應。同時還展示了ADI公司陀螺儀出色的沖擊和振動抑制性能。
2019-07-16 06:15:002584 本視頻是ADI公司MEMS陀螺儀和同類陀螺儀產(chǎn)品的對比演示,比較兩者對錯誤輸出激勵的響應。可以看出,我們的結果新款陀螺儀具有高抗振動、抗沖擊性和抗線性加速度特性。
2019-07-16 06:12:002668 本文主要圍繞嵌套環(huán)MEMS陀螺的關鍵技術展開調(diào)研,分析討論了國內(nèi)外主要研究機構在嵌套環(huán)MEMS陀螺關鍵技術上的研究思路和進展,為后續(xù)嵌套環(huán)MEMS陀螺的研究提供參考和借鑒。
2019-11-30 07:42:007474 
體有徑向速度Vr,那么將會產(chǎn)生切向科里奧利加速度。 MEMS加速度計在較長時間的測量值是正確的,而在較短時間內(nèi)由于信號噪聲的存在,而有誤差。陀螺儀在較短時間內(nèi)則比較準確而較長時間則會有與漂移而存有誤差。因此,需要兩者(相互調(diào)整)來確保航向的正確。 現(xiàn)在一般
2020-04-16 15:10:422253 體有徑向速度Vr,那么將會產(chǎn)生切向科里奧利加速度。 MEMS加速度計在較長時間的測量值是正確的,而在較短時間內(nèi)由于信號噪聲的存在,而有誤差。陀螺儀在較短時間內(nèi)則比較準確而較長時間則會有與漂移而存有誤差。因此,需要兩者(相互調(diào)整)來確保航向的正確。 現(xiàn)在一般
2020-06-08 17:01:251624 近日,揚州大學機械工程學院副教授梁峰帶領的科研團隊對“MEMS陀螺儀的動力學特性”進行了深入分析,研究發(fā)現(xiàn)采用壓電薄膜,可大大提高陀螺儀的靈敏度。
2020-08-12 15:38:331960 以四元數(shù)為基礎的擴展卡爾曼濾波 (EKF)來進行傳感器信息融合;利用陀螺儀測得的角速度更新四元數(shù),使用 GPS信息所計算的偽姿態(tài)來更新濾波器的測量值;仿真結果表明所提出的方法即使在陀螺儀漂移和偽姿態(tài)包含噪聲的情況下,也擁有較好的長期和短期精
2021-01-05 08:00:004 是個非常重要而且必須面對的問題。針對閉環(huán)消偏光纖陀螺信號處理中既要實現(xiàn)對快速A仍采樣數(shù)據(jù)進行濾波,同時又能保證光纖陀螺能夠?qū)崿F(xiàn)閉環(huán)控制以及具有一定的帶寬,以光纖陀螺(FoG)信號濾波處理電路中FPGA和DSP的接口問題為例,探討了三種不同的接口方案的設計思路、優(yōu)缺點及其適用情況,考慮到光纖陀螺信號處理及其濾波
2021-02-01 11:53:2912 DSP技術在電度表中的應用進行了研究,對電度表系統(tǒng)的誤差進行了分析,提出了采用軟件方法來補償誤差的措施,使電度表的精度達到了設計要求,又避免了利用硬件進行誤差補償所帶來的弊端,不用在線路中調(diào)整電壓、電流采樣值,有利于生產(chǎn)。
2021-04-11 11:35:085 機床熱誤差嚴重影響機床的加工精度,必須對其加以控制,在研究機床的熱誤差時,首先需要明確機床的熱特性,該工作可以為后續(xù)熱誤差建模提供模型輸入值。主要綜述了機床熱誤差的來源、機床溫度場的獲取方法、溫度
2021-04-16 09:52:3828 MEMS陀螺儀姿態(tài)算法研究綜述
2021-05-26 14:24:1439 一種簡易的MEMS陀螺儀標定方法
2021-06-11 14:31:0016 MEMS陀螺捷聯(lián)慣導系統(tǒng)標定方法綜述
2021-08-05 16:54:135 Mark Marshall博士將探討這款MEMS陀螺儀的工作原理,并詳細介紹其性能規(guī)格和Pinpoint結構,包括MEMS振動環(huán)的設計與制造。
2023-03-20 09:43:47846 Ericco的MEMS陀螺儀根據(jù)軸數(shù)分為單軸、雙軸和三軸。它分為工業(yè)級、戰(zhàn)術級(ER-MG-056、ER-MG-067)和導航級(ER-MG2-50/100、ER-MG2-300/400)。戰(zhàn)術
2023-07-07 10:16:472085 摘要:MEMS(微機電系統(tǒng))陀螺儀在慣性導航、姿態(tài)控制和運動測量等領域中具有重要應用。然而,傳統(tǒng)MEMS陀螺儀在尺寸和性能方面存在一定的限制。本文介紹了一種基于陶瓷基板的技術芯片實現(xiàn)了小型化MEMS
2023-07-10 15:03:37369 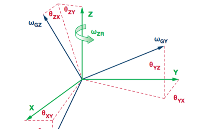
ER-MG2 -50/100高性能尋北MEMS陀螺儀的零偏穩(wěn)定性可達0.1°/hr,零偏重復性為0.1°/hr,可見其測量精度非常高。
2023-07-13 09:32:222309 
MEMS加速度計與MEMS陀螺儀是現(xiàn)代慣性導航系統(tǒng)中最常用的傳感器。
2024-02-17 14:05:00345 
 電子發(fā)燒友App
電子發(fā)燒友App









 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論