慣性導(dǎo)航系統(tǒng)是一種利用慣性測(cè)量單元(如加速度計(jì)和陀螺儀)來測(cè)量和跟蹤物體位置、方向和速度的技術(shù)。在無(wú)人駕駛領(lǐng)域,慣性導(dǎo)航系統(tǒng)通常與衛(wèi)星導(dǎo)航系統(tǒng)(如北斗、GPS)結(jié)合使用,以提供更高精度和更可靠的定位
2023-09-11 17:56:10 1274
1274 
慣性導(dǎo)航系統(tǒng)的主要定位測(cè)量裝置由加速度傳感器和陀螺儀組成。其中,加速度傳感器是用來測(cè)量載體所受到的慣性力,并通過牛頓第二加速度定律獲取被測(cè)載體的加速度值。陀螺儀在該系統(tǒng)中主要是用來測(cè)量載體的偏航角度。通過二者的結(jié)合,慣性導(dǎo)航系統(tǒng)能夠通過加速度值、時(shí)間、偏航角度形成一個(gè)完整的坐標(biāo)體系。
2022-01-17 08:00:006204 ,隨著MEMS陀螺儀的興起,在車輛導(dǎo)航、機(jī)械控制等領(lǐng)域,精確導(dǎo)航的競(jìng)爭(zhēng)一直在對(duì)峙。 ? 導(dǎo)航核心——陀螺慣性測(cè)量單元 ? 在高精度的捷聯(lián)慣導(dǎo)系統(tǒng)中,陀螺慣性測(cè)量單元是絕對(duì)的核心。很長(zhǎng)一段時(shí)間以來,激光陀螺儀都是中高精度慣導(dǎo)系統(tǒng)
2023-10-24 01:11:001284 `供應(yīng) 3DM-GX3-25陀螺儀及慣性測(cè)量系統(tǒng)吳經(jīng)理:0755-26998458 /132,4667,5433傳感器事業(yè)部工作Q:1139878854品牌:美國(guó) MicroStrain產(chǎn)品型號(hào)
2020-06-23 14:30:56
的工業(yè)級(jí)別航姿參考系統(tǒng),內(nèi)置自適應(yīng)卡爾曼濾波器。集成有三軸加速度計(jì),陀螺儀,磁力計(jì)和溫度傳感器,實(shí)現(xiàn)慣性導(dǎo)航最優(yōu)解。 此外,雙處理器運(yùn)行自適應(yīng)擴(kuò)展卡爾曼濾波器(EKF)時(shí)刻跟蹤動(dòng)態(tài)姿態(tài),具有廣泛
2021-01-26 14:38:50
代理供應(yīng) 3DM-GX5-25陀螺儀詳詢請(qǐng)致電: ***吳經(jīng)理工作Q:1139878854 美國(guó)Microstrain 3DM-GX3-25TMAHRS解決了許多應(yīng)用方面的測(cè)量問題,包括:- 無(wú)人駕駛的機(jī)車導(dǎo)航- 平臺(tái)穩(wěn)定- 生物力學(xué)- 可佩戴的慣性追蹤- 鉆孔測(cè)量- 姿態(tài)定位- 運(yùn)動(dòng)性能的提高
2020-07-22 15:14:25
。集成有三軸加速度計(jì),陀螺儀,磁力計(jì)和溫度傳感器,實(shí)現(xiàn)慣性導(dǎo)航最優(yōu)解。 此外,雙處理器運(yùn)行自適應(yīng)擴(kuò)展卡爾曼濾波器(EKF)時(shí)刻跟蹤動(dòng)態(tài)姿態(tài),具有廣泛的應(yīng)用領(lǐng)域,是平臺(tái)穩(wěn)定、車輛健康和健康監(jiān)測(cè)的理想選擇
2020-12-09 16:22:02
全球衛(wèi)星導(dǎo)航系統(tǒng)及其產(chǎn)業(yè)當(dāng)前正經(jīng)歷前所未有的三大轉(zhuǎn)變:從單一的GPS時(shí)代轉(zhuǎn)變?yōu)槎嘈亲⒋婕嫒莸腉NSS新時(shí)代,導(dǎo)致衛(wèi)星導(dǎo)航體系全球化和增強(qiáng)多模化;從以衛(wèi)星導(dǎo)航為應(yīng)用主體轉(zhuǎn)變?yōu)镻NT(定位、導(dǎo)航、授時(shí)
2019-09-29 10:21:26
的工作環(huán)境要求。 SKM-4DX引腳定義: 此慣性導(dǎo)航模塊的優(yōu)勢(shì):(1)擺脫里程計(jì)常規(guī)車載導(dǎo)航系統(tǒng)往往依靠里程計(jì)和陀螺儀的DR方案,實(shí)現(xiàn)汽車復(fù)雜環(huán)境下的高精度導(dǎo)航定位,里程計(jì)信號(hào)對(duì)于很多汽車后裝市場(chǎng)
2020-08-13 01:29:45
了發(fā)明陀螺儀的理論研究。陀螺儀再加上加速度計(jì),就是慣性導(dǎo)航的傳感器部分了。這樣,運(yùn)動(dòng)路徑就和傳感器可測(cè)得的加速度、角加速度這兩個(gè)量聯(lián)系在了一起。慣性導(dǎo)航就是通過測(cè)量這兩個(gè)瞬時(shí)變量,在經(jīng)過一系列公式運(yùn)算
2020-08-14 04:39:59
性導(dǎo)航系統(tǒng) INS( Inertia Navigation System,以下簡(jiǎn)稱慣導(dǎo)) 慣導(dǎo)是一種利用慣性傳感器測(cè)量載體的比力及角速度信息,并結(jié)合給定的初始條件實(shí)時(shí)推算速度、位置、姿態(tài)等參數(shù)的自主
2020-05-18 06:15:18
的物理平臺(tái)平臺(tái)式慣導(dǎo):(下圖a所示)慣性傳感器安裝在一組框架上(平衡環(huán)),通過扭矩電機(jī)根據(jù)陀螺儀感應(yīng)的旋轉(zhuǎn)來實(shí)現(xiàn)平臺(tái)的旋轉(zhuǎn),使得平臺(tái)始終與導(dǎo)航系保持一致。因
2021-09-01 08:06:45
的GNSS/INS組合導(dǎo)航系統(tǒng)。工業(yè)級(jí)慣導(dǎo)系統(tǒng):雙核CPU、GNSS模塊(多星座:GPS, GLONASS, BeiDou、Galileo)、陀螺儀、加速度計(jì)、磁力計(jì)、氣壓計(jì)等MEMS傳感器組成。并通過
2020-12-07 09:06:55
請(qǐng)問各位大神,如何用公式節(jié)點(diǎn)讀取陀螺儀數(shù)據(jù),陀螺儀型號(hào)是6050,謝謝!!!
2017-08-26 10:08:21
1 引言 慣性導(dǎo)航系統(tǒng)具有完全自主性、全天候和抗外界干擾等特點(diǎn),可以提供完整的導(dǎo)航定位參數(shù),己廣泛地應(yīng)用于各種運(yùn)載體的導(dǎo)航定位中。作為核心元件的陀螺儀,它為系統(tǒng)提供坐標(biāo)基準(zhǔn),用于測(cè)量載體的姿態(tài)和方位
2019-06-04 06:37:56
上的產(chǎn)品。可能看到這里,大家還是會(huì)覺得有些迷惑,既然陀螺儀很厲害,那么它在手機(jī)上到底有什么用呢?我們不妨來看看。第一大用途,導(dǎo)航。陀螺儀自被發(fā)明開始,就用于導(dǎo)航,先是德國(guó)人將其應(yīng)用在V1、V2火箭上
2020-09-03 07:29:47
` 陀螺儀的名字由來 陀螺儀名字的來源具有悠久的歷史。據(jù)考證,1850年法國(guó)的物理學(xué)家萊昂·傅科(J.Foucault)為了研究地球自轉(zhuǎn),首先發(fā)現(xiàn)高速轉(zhuǎn)動(dòng)中地的轉(zhuǎn)子(rotor),由于它具有慣性
2020-12-17 16:31:35
。 最早的陀螺儀的簡(jiǎn)易制作方式如下:即將一個(gè)高速旋轉(zhuǎn)的陀螺放到一個(gè)萬(wàn)向支架上,靠陀螺的方向來計(jì)算角速度,簡(jiǎn)易圖如下圖所示。 其中,中間金色的轉(zhuǎn)子即為陀螺,它因?yàn)?b class="flag-6" style="color: red">慣性作用是不會(huì)受到影響的,周邊的三個(gè)
2020-09-09 08:48:00
`陀螺儀在航天航空中的應(yīng)用 陀螺儀器最早是用于航海導(dǎo)航,但隨著科學(xué)技術(shù)的發(fā)展,它在航空和航天事業(yè)中也得到廣泛的應(yīng)用。 陀螺儀器不僅可以作為指示儀表,而更重要的是它可以作為自動(dòng)控制系統(tǒng)中的一個(gè)敏感
2020-09-04 07:52:53
附近,陀螺儀會(huì)測(cè)量運(yùn)動(dòng)的方向和速度,將速度乘以時(shí)間獲得運(yùn)動(dòng)的距離,實(shí)現(xiàn)精確定位導(dǎo)航,并能修正導(dǎo)航線路。 這就是手機(jī)陀螺儀的作用,有沒有覺得這手機(jī)陀螺儀很不可缺少呢? 陀螺儀的特性 接下來,我們用圖
2018-11-08 16:14:38
://ezchina.analog.com/thread/6549要求高精度穩(wěn)定性的慣性導(dǎo)航或其他應(yīng)用經(jīng)常會(huì)使用陀螺儀。為獲得最高性能,用于這些應(yīng)用的陀螺儀一般需要進(jìn)行校準(zhǔn)和外部溫度補(bǔ)償。本資料介紹了一種
2016-01-18 15:31:32
ADIS16485 iSensor?器件是一款完整的慣性系統(tǒng),內(nèi)置一個(gè)三軸陀螺儀和一個(gè)三軸加速度計(jì)。每個(gè)慣性傳感器都實(shí)現(xiàn)了業(yè)界領(lǐng)先的iMEMS?技術(shù)與信號(hào)調(diào)理技術(shù)的完美結(jié)合,可提供優(yōu)化的動(dòng)態(tài)性能
2015-12-26 13:46:59
簡(jiǎn)介對(duì)于在反饋環(huán)路中采用MEMS慣性測(cè)量單元(IMU) 的高性能運(yùn)動(dòng)控制系統(tǒng),傳感器對(duì)準(zhǔn)誤差常常是其關(guān)鍵考慮之一。對(duì)于IMU中的陀螺儀,傳感器對(duì)準(zhǔn)誤差描述各陀螺儀的旋轉(zhuǎn)軸與系統(tǒng)定義的"
2019-10-16 08:00:00
Mark Looney應(yīng)用工程師ADI公司摘要當(dāng)MEMS慣性測(cè)量單元(IMU)用作運(yùn)動(dòng)控制系統(tǒng)中的反饋傳感器時(shí),必須了解陀螺儀的噪聲情況,因?yàn)樗鼤?huì)在所監(jiān)視的平臺(tái)上造成不必要的物理運(yùn)動(dòng)。根據(jù)具體情況
2018-10-22 16:44:26
Mark Looney應(yīng)用工程師ADI公司摘要當(dāng)MEMS慣性測(cè)量單元(IMU)用作運(yùn)動(dòng)控制系統(tǒng)中的反饋傳感器時(shí),必須了解陀螺儀的噪聲情況,因?yàn)樗鼤?huì)在所監(jiān)視的平臺(tái)上造成不必要的物理運(yùn)動(dòng)。根據(jù)具體情況
2018-11-01 11:15:18
3DM-GX5-25陀螺儀產(chǎn)品亮點(diǎn)集成有三軸加速度計(jì),陀螺儀,磁力計(jì)和溫度傳感器,實(shí)現(xiàn)慣性導(dǎo)航最優(yōu)解雙處理器運(yùn)行自適應(yīng)擴(kuò)展卡爾曼濾波器(EKF),卓越的動(dòng)態(tài)姿態(tài)估算優(yōu)點(diǎn)同類性能最佳偏置跟蹤,誤差估計(jì),閾值標(biāo)志
2020-12-09 16:20:17
MEMS陀螺儀也稱電子式陀螺儀,就是一塊芯片。 Iphone 4上的陀螺儀就是這種,主要作用是在GPS沒有信號(hào)時(shí),通過陀螺儀的作用仍然能夠繼續(xù)精確導(dǎo)航。MEMS陀螺儀即硅微機(jī)電陀螺儀,絕大多數(shù)
2018-10-23 10:57:15
陀螺儀,是一種用來感測(cè)與維持方向的裝置,基於角動(dòng)量不滅的理論設(shè)計(jì)出來的。陀螺儀主要是由一個(gè)位於軸心可以旋轉(zhuǎn)的輪子構(gòu)成。 陀螺儀一旦開始旋轉(zhuǎn),由於輪子的角動(dòng)量,陀螺儀有抗拒方向改變的趨向。陀螺儀
2018-11-08 16:12:15
。陀螺儀在工作時(shí)要給它一個(gè)力,使它快速旋轉(zhuǎn)起來,一般能達(dá)到每分鐘幾十萬(wàn)轉(zhuǎn),可以工作很長(zhǎng)時(shí)間。然后用多種方法讀取軸所指示的方向,并自動(dòng)將數(shù)據(jù)信號(hào)傳給控制系統(tǒng)。 手機(jī)陀螺儀的作用:動(dòng)作感應(yīng)的GUI:通過
2012-10-19 14:51:35
本帖翻譯自IMU(加速度計(jì)和陀螺儀設(shè)備)在嵌入式應(yīng)用中使用的指南。這篇文章主要介紹加速度計(jì)和陀螺儀的數(shù)學(xué)模型和基本算法,以及如何融合這兩者,側(cè)重算法、思想的討論介紹本指南旨在向興趣者介紹慣性MEMS(微機(jī)電系統(tǒng))傳感器,特別是加速度計(jì)和陀螺儀以及其他整合IMU(慣性測(cè)量
2021-08-09 06:46:21
如今工程師所設(shè)計(jì)的很多系統(tǒng)和產(chǎn)品中都包含有微機(jī)電系統(tǒng)(MEMS)傳感器,特別是MEMS陀螺儀等關(guān)鍵元器件。這些應(yīng)用種類繁多,從便攜式設(shè)備、可穿戴設(shè)備到工業(yè)機(jī)器人、關(guān)鍵的汽車安全系統(tǒng)等一應(yīng)俱全。它們
2018-11-12 15:35:11
本帖最后由 餅干11 于 2021-8-11 09:44 編輯
我想在一個(gè)比較大的平臺(tái),分別安裝陀螺儀實(shí)現(xiàn)這個(gè)平臺(tái)穩(wěn)定,平臺(tái)是三個(gè)吊輪吊著的,如何讓陀螺儀判斷哪個(gè)吊輪快了或者慢了,然后給單片機(jī)指令去控制吊輪,但是平臺(tái)太大了會(huì)不會(huì)導(dǎo)致陀螺儀不靈敏,比如人在地球上感覺不到地球自轉(zhuǎn)一樣。
2021-08-11 08:32:28
的速度、偏航角和位置等信息,同時(shí)可以獲得載體的載體信息。但慣性導(dǎo)航系統(tǒng)由于陀螺儀零點(diǎn)漂移嚴(yán)重,車輛震動(dòng)等因素,致使無(wú)法通過直接積分加速度獲得高精度的方位和速度等信息,即現(xiàn)有的微慣性導(dǎo)航系統(tǒng)很難長(zhǎng)時(shí)間
2017-10-12 18:13:02
的工作壽命更長(zhǎng)、成本更低和制造更簡(jiǎn)單,這種陀螺也被稱為固態(tài)環(huán)形激光陀螺儀(固態(tài)RLG)。 目前,基于氦-氖環(huán)形激光陀螺儀的慣性導(dǎo)航系統(tǒng)已經(jīng)廣泛應(yīng)用在航空和航海導(dǎo)航、戰(zhàn)略導(dǎo)彈的導(dǎo)航、制導(dǎo)與控制領(lǐng)域,成為
2018-11-09 16:05:25
,是發(fā)達(dá)國(guó)家不可缺少的基本導(dǎo)航定位手段之一,如自動(dòng)化程度很高的波音飛機(jī)都裝載有磁導(dǎo)航定位系統(tǒng)。 二、什么是陀螺儀 為了介紹地磁傳感器與陀螺儀的區(qū)別,此處先對(duì)陀螺儀加以簡(jiǎn)單介紹。 陀螺儀的原理就是,一個(gè)
2021-01-20 14:41:13
基于加速度計(jì)的無(wú)陀螺慣性導(dǎo)航系統(tǒng)的研究汽車狀態(tài)的實(shí)時(shí)準(zhǔn)確測(cè)量是汽車智能輔助駕駛系統(tǒng)研究的關(guān)鍵問題。本文針對(duì)智能輔助駕駛車輛研究的需求,建立了一套無(wú)陀螺儀式慣性導(dǎo)航系統(tǒng)。該系統(tǒng)沒有采用傳統(tǒng)的陀螺儀測(cè)量
2009-12-02 12:40:03
陀螺儀動(dòng)態(tài)測(cè)試系統(tǒng)軟件是由哪些部分組成的? 硬件又是由哪些部分組成的?請(qǐng)問如何利用PC/104來設(shè)計(jì)陀螺儀動(dòng)態(tài)測(cè)試系統(tǒng)?
2021-04-13 06:02:27
慣性空間繞正交于自轉(zhuǎn)軸的一個(gè)或二個(gè)軸的角運(yùn)動(dòng)檢測(cè)裝置,手機(jī)上的指南針功能就是一種很好的證明。如通過其他原理進(jìn)行制作的角運(yùn)動(dòng)檢測(cè)裝置,功能一樣的的也稱陀螺儀。可以精確的分析判斷出使用者的實(shí)際動(dòng)作,通過他
2018-11-07 09:53:37
遠(yuǎn)距離測(cè)量系統(tǒng)或自動(dòng)控制、慣性導(dǎo)航平臺(tái)中使用較多。 陀螺穩(wěn)定平臺(tái)。以陀螺儀為核心元件,使被穩(wěn)定對(duì)象相對(duì)慣性空間的給定姿態(tài)保持穩(wěn)定的裝置。穩(wěn)定平臺(tái)通常利用由外環(huán)和內(nèi)環(huán)構(gòu)成制平臺(tái)框架軸上的力矩器以產(chǎn)生
2020-09-06 07:49:27
陀螺儀(角速率傳感器或角速度傳感器)是一種可以測(cè)量到物體角速度的裝置。陀螺儀可以感知旋轉(zhuǎn)運(yùn)動(dòng)和方向的變化。角速度不同,運(yùn)動(dòng)產(chǎn)生的電位差也不同。陀螺儀將角速度的變化轉(zhuǎn)換成電信號(hào)輸出。
2020-08-19 06:15:05
陀螺儀因其獨(dú)特的性質(zhì),被廣泛應(yīng)用在導(dǎo)航系統(tǒng)(航空航海)、運(yùn)動(dòng)分析與控制、平臺(tái)的穩(wěn)定性檢測(cè)與控制、滾動(dòng)檢測(cè)、轉(zhuǎn)速控制、高要求的慣性測(cè)量單元、機(jī)器人控制系統(tǒng)等方面,而在電子領(lǐng)域則可以用于光學(xué)防抖
2018-12-05 15:25:46
捷聯(lián)慣性導(dǎo)航技術(shù),加速度與陀螺儀傳感器,控制attach://209539.pdf
2014-08-20 15:15:14
捷聯(lián)式慣性導(dǎo)航系統(tǒng)
2016-08-17 12:06:13
~+105 °C
規(guī)格尺寸:22.4mm ×22.4mm ×9.0mm
三 典型應(yīng)用領(lǐng)域
L2~L5智能駕駛
組合導(dǎo)航系統(tǒng)自主導(dǎo)航
ADAS傳感器精準(zhǔn)平臺(tái)穩(wěn)定
詳細(xì)資料請(qǐng)查閱手冊(cè);*附件:RJX-IMU-16460慣性測(cè)量單元產(chǎn)品手冊(cè).pdf
2024-01-18 13:46:16
為什么要設(shè)計(jì)一個(gè)輪式小車慣性導(dǎo)航系統(tǒng)?輪式小車慣性導(dǎo)航系統(tǒng)的軟件裝置怎樣去設(shè)計(jì)?輪式小車慣性導(dǎo)航系統(tǒng)的硬件裝置怎樣去設(shè)計(jì)?如何去測(cè)試輪式小車慣性導(dǎo)航系統(tǒng)?
2021-04-19 11:35:46
陀螺儀測(cè)試系統(tǒng)硬件是怎樣設(shè)計(jì)的?如何去設(shè)計(jì)陀螺儀測(cè)試系統(tǒng)的軟件?怎樣去設(shè)計(jì)一款機(jī)載陀螺儀測(cè)試系統(tǒng)?并將其應(yīng)用于哪些領(lǐng)域?
2021-04-13 06:19:00
。 慣性導(dǎo)航的優(yōu)勢(shì)和限制:慣性導(dǎo)航具有體積小、成本低、精度高、不依賴外界信息、抗干擾能力極強(qiáng)、隱蔽性好等特點(diǎn)。慣性測(cè)量裝置一般包括加速度計(jì)和陀螺儀。加速度計(jì)是測(cè)量物體的加速度,陀螺儀又被叫做角速度傳感器
2018-03-26 11:26:37
激光陀螺儀的光環(huán)路實(shí)際上是一種光學(xué)振蕩器,按光腔形狀分有三角形陀螺和正方形陀螺,腔體結(jié)構(gòu)有組件式和整體式兩種,一般三角型激光陀螺用的最多。
2019-10-23 09:00:26
夠提供全姿態(tài)信息參數(shù),這是其他導(dǎo)航系統(tǒng)所不能比擬的。內(nèi)置三軸陀螺儀,三軸加速度計(jì),三軸磁傳感器,可以測(cè)量載體的速度、位置、姿態(tài),以及輸出補(bǔ)償后的角速率、加速度、磁場(chǎng)等數(shù)據(jù)信息。特點(diǎn)該模塊可以完成
2022-01-07 06:44:53
Ben Wang汽車航位推算(DR)導(dǎo)航系統(tǒng)采用一個(gè)陀螺儀(gyro)來推算車輛的即時(shí)航向。借助該信息再加上行駛的距離,導(dǎo)航系統(tǒng)可以正確確定車輛的位置,即使衛(wèi)星信號(hào)因擁擠的城區(qū)環(huán)境或隧道而受阻時(shí)亦是
2018-10-22 14:35:59
汽車航位推算(DR)導(dǎo)航系統(tǒng)采用一個(gè)陀螺儀(gyro)來推算車輛的即時(shí)航向。借助該信息再加上行駛的距離,導(dǎo)航系統(tǒng)可以正確確定車輛的位置,即使衛(wèi)星信號(hào)因擁擠的城區(qū)環(huán)境或隧道而受阻時(shí)亦是如此。在DR導(dǎo)航
2018-10-22 17:00:37
和最輕的工業(yè)級(jí)別航姿參考系統(tǒng),內(nèi)置自適應(yīng)卡爾曼濾波器。集成有三軸加速度計(jì),陀螺儀,磁力計(jì)和溫度傳感器,實(shí)現(xiàn)慣性導(dǎo)航*優(yōu)解。此外,雙處理器運(yùn)行自適應(yīng)擴(kuò)展卡爾曼濾波器( EKF )時(shí)刻跟蹤動(dòng)態(tài)姿態(tài),具有
2020-04-13 14:55:30
。陀螺儀就是慣性制導(dǎo)的基礎(chǔ)慣性導(dǎo)航系統(tǒng)有平臺(tái)式和捷聯(lián)式兩類實(shí)現(xiàn)方案:前者有跟蹤導(dǎo)航坐標(biāo)系的物理平臺(tái), 慣性儀表安裝在平臺(tái)上, 對(duì)加速度計(jì)信號(hào)進(jìn)行積分可得到速度及位置信息, 姿態(tài)信息由平臺(tái)環(huán)架上的姿態(tài)角
2020-06-13 08:00:00
如題,陀螺儀測(cè)得的角頻率是導(dǎo)航參考坐標(biāo)系的還是儀器自身載體坐標(biāo)系的?
2019-05-31 01:24:09
做一個(gè)步速慣性導(dǎo)航的產(chǎn)品 ,需要陀螺儀,請(qǐng)幫忙推薦陀螺儀的芯片,X軸一個(gè),Y軸一個(gè),Z軸一個(gè)
2019-02-15 09:46:18
捷聯(lián)式組合導(dǎo)航系統(tǒng)[1],影響系統(tǒng)精度的主要誤差源有:慣性器件的刻度系數(shù)誤差、零位誤差及軸安裝不對(duì)準(zhǔn)角等。為了確保系統(tǒng)的對(duì)準(zhǔn)和導(dǎo)航精度,必須利用精密轉(zhuǎn)臺(tái)對(duì)以上誤差源進(jìn)行精確標(biāo)定,并通過系統(tǒng)軟件加以補(bǔ)償。一般情況下,在完成系統(tǒng)標(biāo)定后,若不對(duì)陀螺、加速度計(jì)全文下載
2010-04-24 09:31:29
嵌入式實(shí)時(shí)操作系統(tǒng)VxWorks在慣性導(dǎo)航系統(tǒng)中的應(yīng)用
2009-03-29 12:26:36 18
18 對(duì)慣性導(dǎo)航系統(tǒng)、北斗雙星定位系統(tǒng)兩者的組合進(jìn)行了研究。建立了慣性/北斗雙星組合導(dǎo)航系統(tǒng)的數(shù)學(xué)模型,針對(duì)雙星系統(tǒng)噪聲特性難于統(tǒng)計(jì)的特點(diǎn)設(shè)計(jì)了可實(shí)時(shí)估計(jì)量測(cè)噪聲的自
2009-12-16 12:46:1339 陀螺電機(jī)是慣性器件陀螺儀的主要構(gòu)成部分,而陀螺儀是慣性導(dǎo)航系統(tǒng)的核心元件,廣泛運(yùn)用于艦船導(dǎo)航和各
2010-11-17 10:18:271260 設(shè)計(jì)了一款基于MEMS陀螺和MEMS加速度計(jì)的低成本微慣性導(dǎo)航系統(tǒng)。采用“四元數(shù)”法進(jìn)行姿態(tài)計(jì)算,通過比力變換、積分
2010-12-29 15:05:332180 
傳統(tǒng)上,陀螺儀是用于測(cè)量旋轉(zhuǎn)角速率的機(jī)械器件,其常見用途之一就是在導(dǎo)航系統(tǒng)中估算方位角。在系統(tǒng)中安裝此類陀螺儀時(shí),通常會(huì)涉及到艙壁安裝的機(jī)械設(shè)計(jì),即機(jī)械定位螺絲系統(tǒng)
2011-08-25 17:27:250 陀螺儀因其獨(dú)特的性質(zhì),被廣泛應(yīng)用在導(dǎo)航系統(tǒng)(航空航海)、運(yùn)動(dòng)分析與控制、平臺(tái)的穩(wěn)定性檢測(cè)與控制、滾動(dòng)檢測(cè)、轉(zhuǎn)速控制、高要求的慣性測(cè)量單元、機(jī)器人控制系統(tǒng)等方面,而在電子領(lǐng)域則可以用于光學(xué)防抖、游戲控制、3D鼠標(biāo)當(dāng)中。
2017-11-30 10:17:5115962 陀螺電機(jī)是慣性器件陀螺儀的主要構(gòu)成部分,而陀螺儀是慣性導(dǎo)航系統(tǒng)的核心元件,廣泛運(yùn)用于艦船導(dǎo)航和各種武器系統(tǒng)中。陀螺電機(jī)的性能好壞,將直接影響陀螺儀的性能以及整個(gè)慣導(dǎo)系統(tǒng)的導(dǎo)航精度,因此,對(duì)于陀螺電機(jī)供電電源的設(shè)計(jì)顯得十分重要,其電壓、頻率穩(wěn)定度等都直接影響電機(jī)的工作精度。
2018-06-15 10:35:001765 
陀螺儀作為慣性導(dǎo)航系統(tǒng)的核心部件,能夠?yàn)檩d體提供精確的空間角位置信息。目前,能達(dá)到慣性級(jí)的中高精度陀螺儀仍多為工作在閉環(huán)條件下的機(jī)械式陀螺儀,如液浮陀螺儀、動(dòng)力調(diào)諧陀螺儀( Dynamically
2018-01-23 14:24:490 慣性導(dǎo)航系統(tǒng) INS( Inertia Navigation System ,以下簡(jiǎn)稱慣導(dǎo) ) 慣導(dǎo)是一種利用慣性傳感器測(cè)量載體的比力及角速度信息,并結(jié)合給定的初始條件實(shí)時(shí)推算速度、位置、姿態(tài)等參數(shù)的自主式導(dǎo)航系統(tǒng).具體來說慣性導(dǎo)航系統(tǒng)屬于一種推算導(dǎo)航方式。
2018-04-26 09:06:0062937 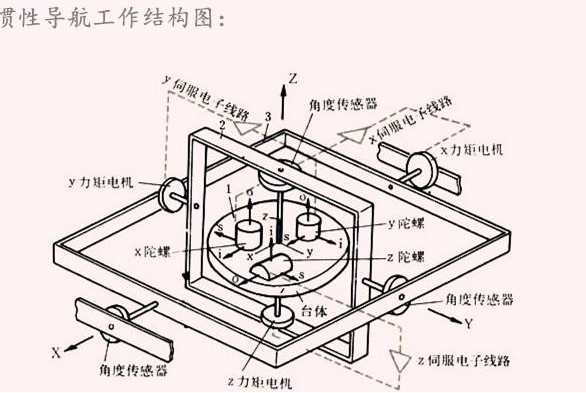
慣性導(dǎo)航系統(tǒng)(INS,Inertial Navigation System)也稱作慣性參考系統(tǒng),是一種不依賴于外部信息、也不向外部輻射能量(如無(wú)線電導(dǎo)航那樣)的自主式導(dǎo)航系統(tǒng)。其工作環(huán)境不僅包括空中
2018-03-04 09:25:442683 。INS(慣性導(dǎo)航系統(tǒng)):以牛頓力學(xué)定律為基礎(chǔ),通過測(cè)量載體在慣性參考系的加速度,將它對(duì)時(shí)間進(jìn)行積分,且把它變換到導(dǎo)航坐標(biāo)系中,就能夠得到在導(dǎo)航坐標(biāo)系中的速度、姿態(tài)和位置等信息。? ? ? INS(慣性
2018-04-27 11:05:034099 針對(duì)在導(dǎo)航系統(tǒng)姿態(tài)解算中,陀螺儀和電子羅盤在解算姿態(tài)時(shí)分別存在積分誤差和磁場(chǎng)干擾的問題,提出了利用Kalman濾波和互補(bǔ)濾波相融合的算法進(jìn)行定位。首先將電子羅盤和陀螺儀通過Kalman濾波得出最優(yōu)
2018-05-02 08:27:0018388 
慣性導(dǎo)航系統(tǒng)根據(jù)陀螺儀的不同,可分為機(jī)電(包含液浮、氣浮、靜電、 撓性等種類)陀螺儀、光學(xué)(包含激光、光纖等種類) 陀螺儀、微機(jī)械(MEMS)陀螺儀等類型的慣性導(dǎo)航系統(tǒng)。
2018-05-10 17:09:4133756 陀螺儀作為一種慣性測(cè)量器件,是慣性導(dǎo)航、慣性制導(dǎo)和慣性測(cè)量系統(tǒng)的核心部件,廣泛應(yīng)用于軍事和民用領(lǐng)域。
2019-07-15 08:02:006495 
的精度在整個(gè)過程中起到了至關(guān)重要的作用,也就是高精度的陀螺儀直接決定了慣性導(dǎo)航系統(tǒng)的精度以及制導(dǎo)和自動(dòng)控制系統(tǒng)的性能品質(zhì)。
2018-10-23 17:34:0920525 慣性導(dǎo)航系統(tǒng)是隨慣性傳感器(陀螺儀和加速度計(jì))技術(shù)的發(fā)展而發(fā)展起來的一門導(dǎo)航技術(shù),由于具有完全自主,不受任何干擾,隱蔽性強(qiáng),輸出信息量大,輸出信息實(shí)時(shí)性強(qiáng)等優(yōu)點(diǎn),在軍事領(lǐng)域和民用領(lǐng)域都得到了廣泛
2018-10-30 19:45:3514 美國(guó)科學(xué)家研制出了迄今全球最小的光學(xué)陀螺儀,其個(gè)頭比一粒米還小,僅為目前最尖端光學(xué)陀螺儀大小的1/500,未來有望用于無(wú)人機(jī)和航天器上。
2018-11-07 09:03:513353 由美國(guó)加州理工學(xué)院設(shè)計(jì)的一款面積僅為2平方毫米的硅基光學(xué)陀螺儀,得益于采用的一種噪聲自消除技術(shù),克服了這類微型慣性單元中的主要誤差源。
2019-02-11 15:52:123231 捷聯(lián)式慣性導(dǎo)航系統(tǒng),其慣性測(cè)量裝臵(加速度計(jì)和陀螺儀)直接裝在飛 行器、艦艇、導(dǎo)彈等載體上,載體轉(zhuǎn)動(dòng)時(shí),加速度計(jì)和陀螺儀的敏感軸指向也跟隨轉(zhuǎn)動(dòng)。陀螺儀測(cè)量載體角運(yùn)動(dòng),計(jì)算載體姿態(tài)角,從而確定加速度計(jì)
2020-04-28 11:40:501167 慣性器件 慣性導(dǎo)航系統(tǒng)通常由慣性測(cè)量裝臵、計(jì)算機(jī)、顯示器等組成。慣性測(cè)量裝 臵由兩大核心慣性元器件組成:加速度計(jì)和陀螺儀。三個(gè)自由度的陀螺用來測(cè)量 飛行器的角加速度,三個(gè)加速度計(jì)用來測(cè)量飛行器
2020-04-28 11:14:033225 傅科稱這種剛體為陀螺,后來制成供姿態(tài)測(cè)量用的陀螺儀。1906年H.安休茲制成陀螺方向儀,其自轉(zhuǎn)軸能指向固定的方向。1907年他又在方向儀上增加擺性,制成陀螺羅盤。這些成果成為慣性導(dǎo)航系統(tǒng)的先導(dǎo)。1923年M.舒拉發(fā)表舒拉擺理論,解決了在運(yùn)動(dòng)載體上建立
2020-04-28 10:59:553516 信息,也不向外界輻射能量,不易受到干擾,是一種自主式導(dǎo)航系統(tǒng)。 慣性測(cè)量裝置,包括加速度計(jì)和陀螺儀,又稱慣性導(dǎo)航組合。前者是測(cè)量物體的加速度,后者又被叫做角速度傳感器,是測(cè)量角速度的,利用這些裝置的參數(shù),計(jì)
2020-06-01 10:21:443291 信息,也不向外界輻射能量,不易受到干擾,是一種自主式導(dǎo)航系統(tǒng)。 慣性測(cè)量裝置,包括加速度計(jì)和陀螺儀,又稱慣性導(dǎo)航組合。前者是測(cè)量物體的加速度,后者又被叫做角速度傳感器,是測(cè)量角速度的,利用這些裝置的參數(shù),計(jì)算并
2020-06-08 14:41:521898 近幾年來,MEMS慣性傳感器發(fā)展迅速,精度不斷提高。雖然精度相比光纖陀螺、激光陀螺仍有很大差距,但是其價(jià)格低、體積小、重量輕,使MEMS慣性導(dǎo)航系統(tǒng)在慣性導(dǎo)航系統(tǒng)中發(fā)揮重要作用。
2020-07-14 15:32:553351 慣性導(dǎo)航系統(tǒng)(INS,以下簡(jiǎn)稱慣導(dǎo))是一種不依賴于外部信息、也不向外部輻射能量的一種自主式導(dǎo)航系統(tǒng),主要由陀螺儀和加速度計(jì)兩部分組成。
2020-10-20 16:11:572833 作為黃隴礦區(qū)首套引進(jìn)的LASC慣性導(dǎo)航系統(tǒng),該系統(tǒng)采用軍用高精度光纖陀螺儀和定制的定位導(dǎo)航算法,可以實(shí)時(shí)監(jiān)測(cè)采煤機(jī)三維姿態(tài)、精準(zhǔn)定位,實(shí)現(xiàn)工作面自動(dòng)調(diào)直,采煤工藝水平控制、遠(yuǎn)程監(jiān)測(cè)與控制等功能。
2021-02-23 10:28:294153 電子發(fā)燒友網(wǎng)報(bào)道(文/李誠(chéng))慣性導(dǎo)航系統(tǒng)是一種不受電磁波干擾,且不依靠外界信號(hào)即可完成自主定位的導(dǎo)航系統(tǒng)。
2022-01-19 15:46:232581 陀螺儀作為一種檢測(cè)外部旋轉(zhuǎn)角速度的器件,可以結(jié)合加速度計(jì)構(gòu)建慣性導(dǎo)航系統(tǒng),在軍事、工業(yè)和消費(fèi)電子領(lǐng)域的許多應(yīng)用中發(fā)揮著不可替代的作用,例如:慣性導(dǎo)航、航姿參考、角度檢測(cè)等。然而,在無(wú)人駕駛航天器、火箭發(fā)射和石油鉆探等涉及極端環(huán)境的應(yīng)用中,陀螺儀芯片會(huì)受到很大的沖擊過載。
2022-09-19 10:48:16461 隨著慣性導(dǎo)航系統(tǒng)的快速發(fā)展,陀螺儀一直都是慣性導(dǎo)航系統(tǒng)的核心,其性能決定了慣性導(dǎo)航系統(tǒng)的性能。隨著現(xiàn)代物理學(xué)的快速發(fā)展,特別是量子控制等領(lǐng)域的快速進(jìn)步,高精度、小體積、低功耗、低成本的核磁共振陀螺成為一個(gè)重要的研究方向。
2022-10-15 18:53:37538 隨著服務(wù)機(jī)器人的市場(chǎng)和技術(shù)的增長(zhǎng),導(dǎo)航已成為研究應(yīng)用的熱點(diǎn)。與車輛、輪船或飛機(jī)相比,服務(wù)機(jī)器人體積小,成本低,因此它們的導(dǎo)航系統(tǒng)應(yīng)該是捷聯(lián)和低成本的。傳統(tǒng)的穩(wěn)定平臺(tái)導(dǎo)航系統(tǒng)通常涉及單獨(dú)的加速器和光纖或基于激光的陀螺儀,所有組件都機(jī)械和剛性地安裝在與移動(dòng)車輛隔離的穩(wěn)定平臺(tái)上。
2022-12-22 14:45:256180 
汽車航位推算 (DR) 導(dǎo)航系統(tǒng)使用陀螺儀(陀螺儀)來估計(jì)車輛的瞬時(shí)航向。這些信息與行駛距離相結(jié)合,使導(dǎo)航系統(tǒng)能夠正確確定車輛的位置,即使在擁擠的市區(qū)或隧道中衛(wèi)星信號(hào)被阻擋時(shí)也是如此。在DR導(dǎo)航中使
2023-01-30 14:16:551681 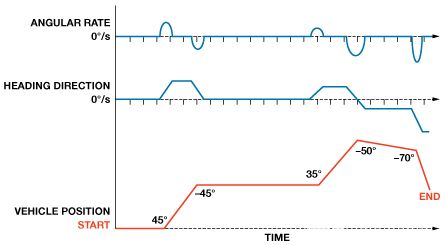
光學(xué)陀螺儀是一種利用光學(xué)原理測(cè)量角速度和角位移的裝置。其基本原理是利用光的干涉或相對(duì)位移來檢測(cè)旋轉(zhuǎn)運(yùn)動(dòng)。
2023-07-19 14:58:55430 慣性導(dǎo)航技術(shù)是慣性技術(shù)的核心和發(fā)展標(biāo)志,慣性導(dǎo)航系統(tǒng) (Inertia navigation system,INS) 利用陀螺儀和加速度計(jì) (統(tǒng)稱為慣性儀表) 同時(shí)測(cè)量載體運(yùn)動(dòng)的角速度和線加速度,并通過計(jì)算機(jī)實(shí)時(shí)計(jì)算出載體的三維姿態(tài)、 速度、 位置等導(dǎo)航信息。
2023-08-22 09:56:072988 
,我們來介紹三軸陀螺儀。三軸陀螺儀是指具有三個(gè)測(cè)量軸的陀螺儀,通常以x、y和z軸表示。它們用于測(cè)量物體圍繞這些軸的旋轉(zhuǎn)。 三軸陀螺儀可以感知物體的旋轉(zhuǎn)方向和速度,并且具有較高的精確度和穩(wěn)定性。它們通常用于導(dǎo)航系統(tǒng)、
2024-01-02 14:22:101180 MEMS加速度計(jì)與MEMS陀螺儀是現(xiàn)代慣性導(dǎo)航系統(tǒng)中最常用的傳感器。
2024-02-17 14:05:00345 
以激光陀螺儀為核心部件的導(dǎo)航系統(tǒng)是一種慣性導(dǎo)航系統(tǒng),相對(duì)于大家耳熟能詳?shù)腉PS和北斗等衛(wèi)星導(dǎo)航系統(tǒng),熟知慣性導(dǎo)航系統(tǒng)的人很少。
2024-02-23 18:09:091202
 電子發(fā)燒友App
電子發(fā)燒友App









 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論