 木質機械臂DIY圖解
木質機械臂DIY圖解

步驟1:說明
LewanSoul-WoodenArm是基于Arduino Nano板的性能強大的木制機械臂。整個機械臂的機械結構由純木制成。它的外觀精致小巧,結構穩定性強。它使用的主要控制芯片是Arduino Nano板。輸出是LFD-01伺服器,可以同時連接多個模塊。可以基于不同的傳感器模塊創建各種有趣的游戲。
步驟2:了解零件
這個可愛的WoodenArm具有各種電子模塊:加速模塊ADXL-345,顏色模塊APDS-9960,旋鈕模塊,LED顯示屏,LDF-01伺服器。
此外,基于Arduino Nano控制板,我們開發了自己的Arduino擴展板以具有更多的功能模塊,然后使用WoodenArm實現更多的創造力,更好的學習編程和過程中的經驗,帶給我們快樂。因此,聰明的WoodenArm有能力實現不同的游戲玩法。
第3步:車身組裝_1

所需材料:
機器人手臂支架* 1
LDF-01伺服器* 1
螺絲刀* 1
螺絲*多個
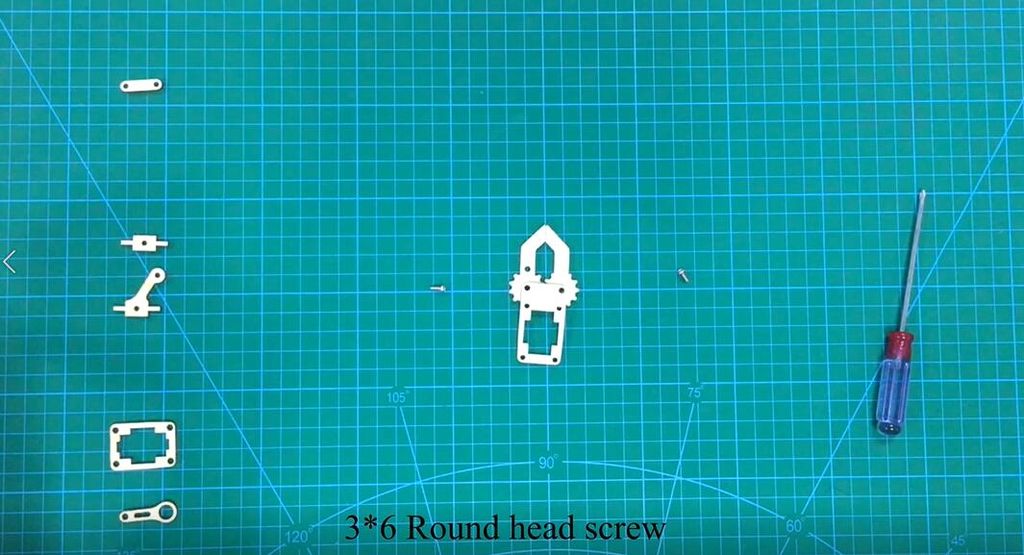
您需要如圖所示安裝身體的一部分。只需用螺釘固定小塊,然后使用螺釘和伺服器將它們固定在一起。在此過程中,請注意調整螺釘的松緊度。注意調整松緊度。此過程測試三顆星的手的能力。
步驟4:車身組裝_2









所需材料:
機器人手臂支架* 1
LDF-01伺服器* 1
螺絲刀* 1
螺絲**
您需要安裝身體的一部分,如圖所示。
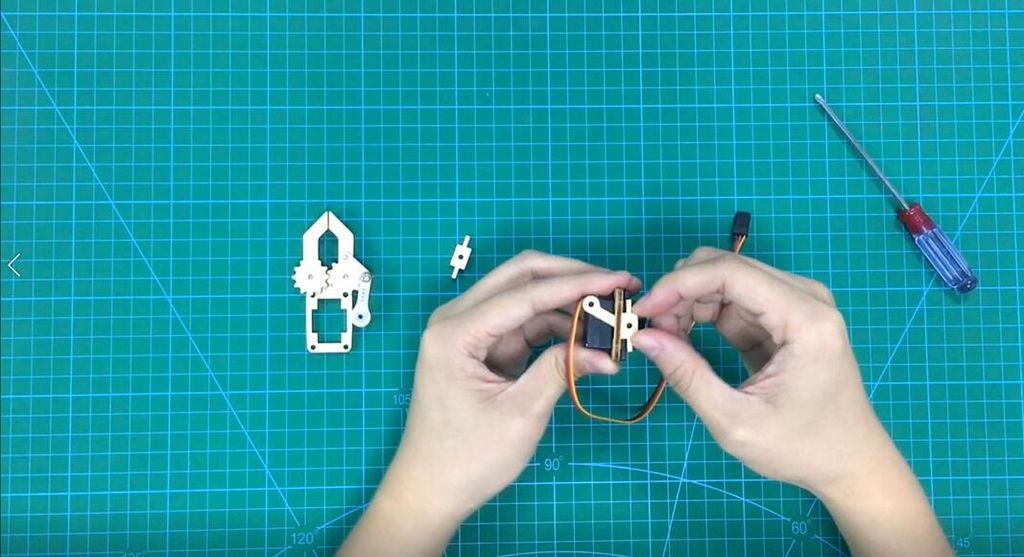
只需用相應的螺釘固定小塊,然后用螺釘將伺服器和塊連接并固定,然后將伺服器和塊固定在一起。注意調整松緊度。此過程測試2星的手的能力。
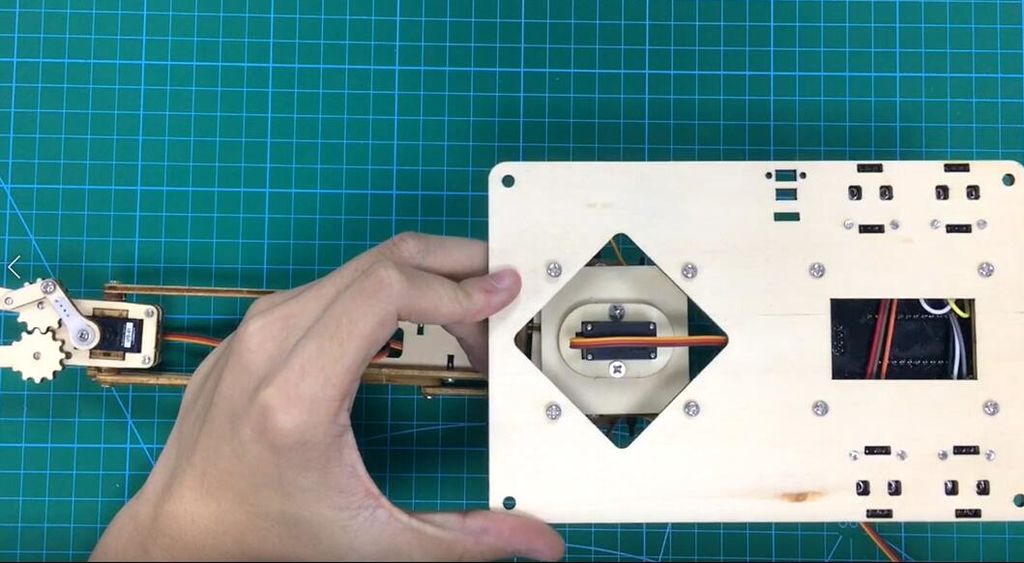
步驟5:車身組裝_3












所需材料:
機器人手臂支架* 1
LDF-01伺服* 1
螺絲刀* 1
螺絲**
您需要如圖所示安裝身體的一部分。這一部分比上一部分要簡單一些。只需用相應的螺釘固定小塊,然后將它們與上一步中組裝的伺服器一起安裝。注意調整松緊度。此過程測試3星的動手能力。
步驟6:爪式裝配











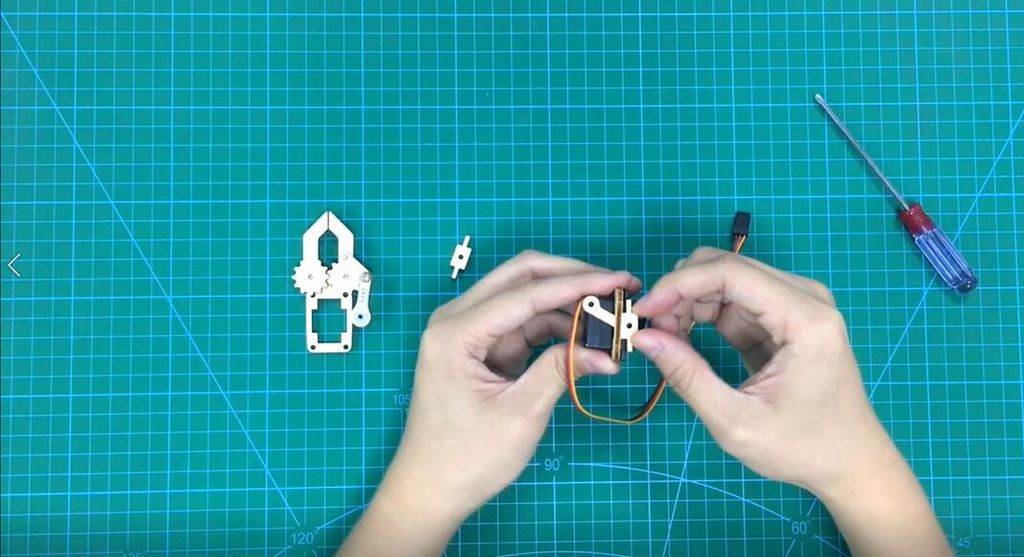
所需材料:
機械手臂支架* 1
LDF-01伺服* 1
螺絲刀* 1
螺絲**數
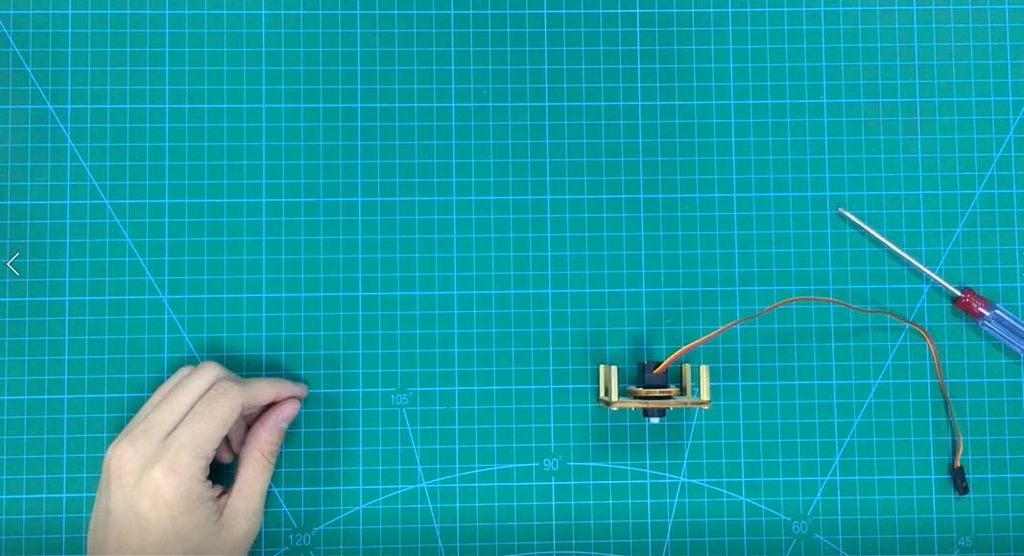
您需要如圖所示安裝爪。只需用相應的螺絲固定小木塊,然后用螺絲將伺服器和木塊連接并固定,然后將伺服器和小木塊固定在一起即可。
請注意調整松緊度。此過程測試了4星的指針能力。
步驟7:機箱組裝




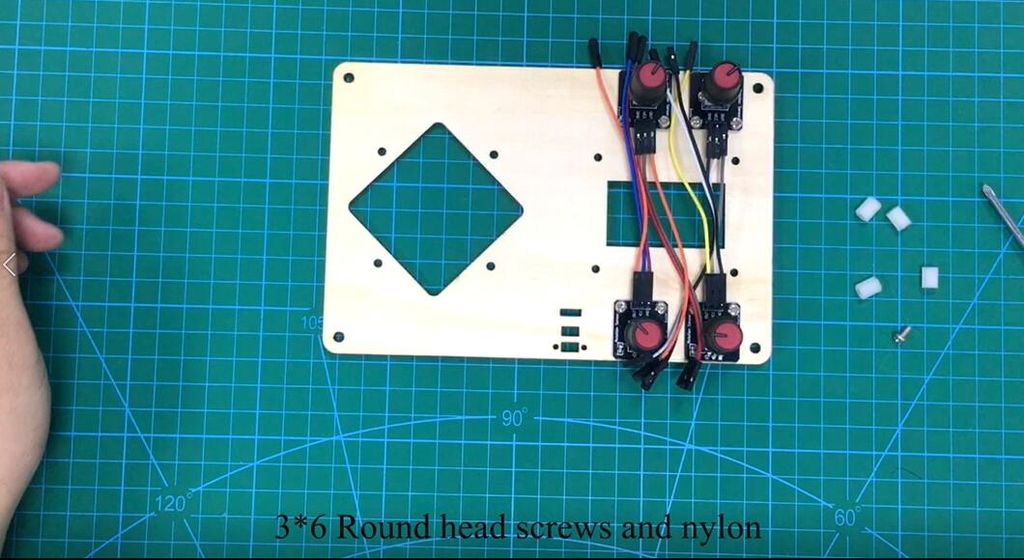



所需材料:
機器人手臂車身支架* 1
杜邦線* 4
螺絲*多個
尼龍* 4
旋鈕模塊* 4
Arduino Nano控制板* 1
擴展板* 1
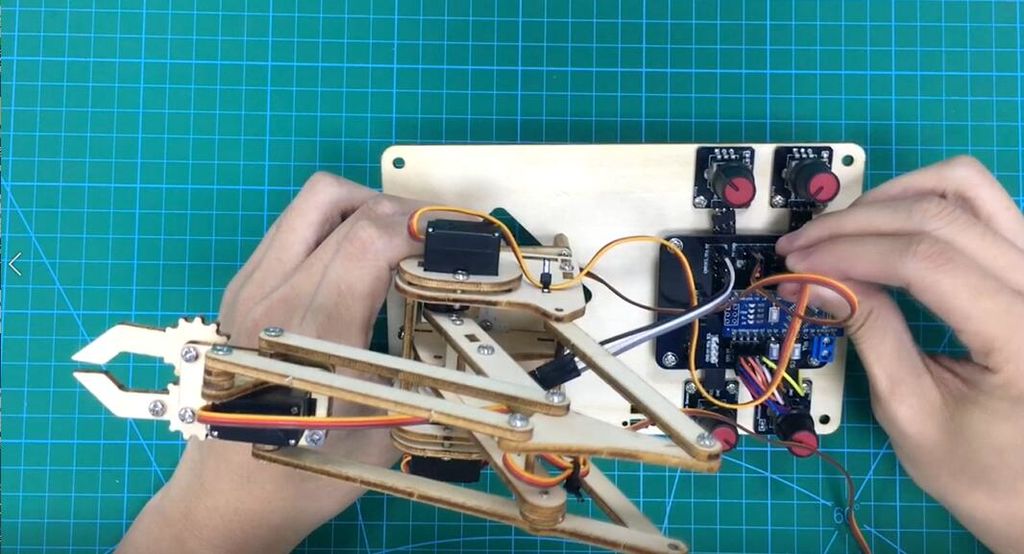
您需要如圖所示安裝機箱。這部分是用螺絲將旋鈕模塊固定到基座上。同時,需要在旋鈕模塊上插入杜邦線。最后,將Arduino Nano控制板和Arduino擴展板擰入四個旋鈕模塊的中間。此過程測試四顆星的手的能力。
步驟8:整體組裝



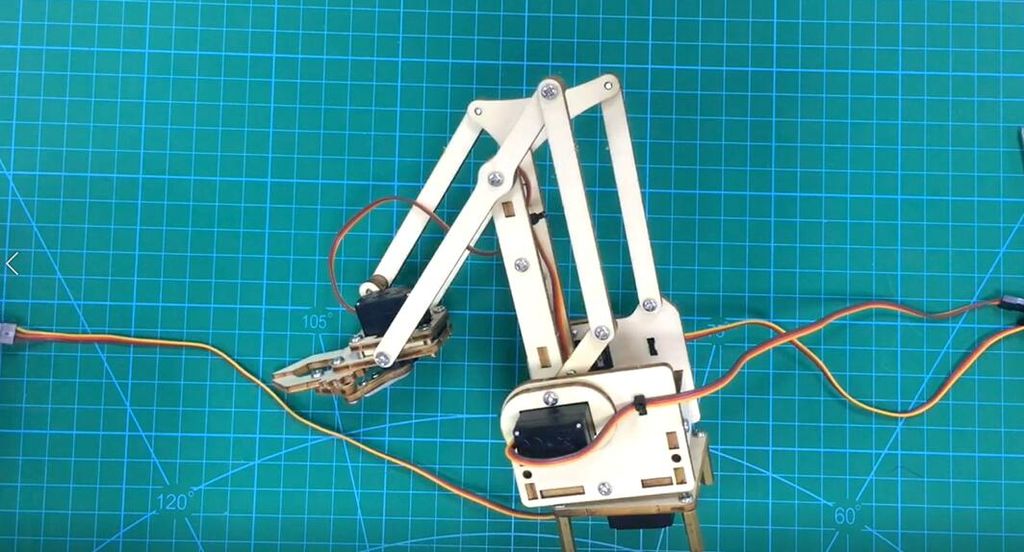








所需材料:
30cm纏繞管* 1
螺絲*幾個
吸盤,墊圈,墊圈,螺母* 1
滾動帶* 4
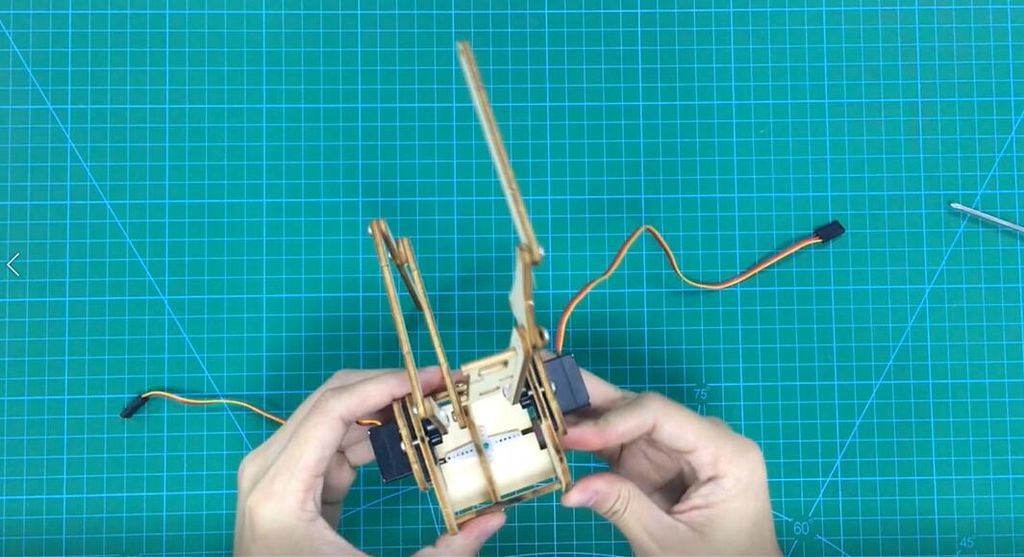
恭喜,您終于到了安裝的最后一步。您需要如圖所示安裝其余部分。在此步驟中,您需要將先前安裝的基座和手臂部分固定在一起,以便可以成為完整的WoodeArm。此過程測試了三顆星的手的能力。
https://www.youtube.com/playlist?list=PLQYW5Ukp- 1D-4u2Z8CBjoQ4pSFhfnP74B
第9步:設計注意事項
市場上有很多金屬車,包括我們自己的產品。但是,隨著時代的變遷,我們一直在思考如何與時代融合,并呼應當代倡導的主題。在這個想法的驅使下,我們設計了木制車WoodenArm。汽車的外殼是木質的,因此顯示了環保主題。在我們的安裝包中,手推車底座和臂上使用的木材是固定的,經過完美切割后,由于安裝后的零浪費,所有組件都可以派上用場。汽車上的Arduino Nano控制板和我們自己的Arduino擴展板也使汽車在功能上更加強大,并激發了用戶的創造力。我們支持所有創意。此外,復古的外觀,輕巧的外觀,不傷手的材料,易于安裝的功能以及強大的功能使該產品與眾不同。
步驟10:游戲和最終備注
您可以使用計算機或紅外線遙控器控制木臂。
您可以插入將該程序放入Arduino Nano控制板以控制WoodenArm。您還可以修改程序,甚至自己創建一個新程序。實際上,為了幫助用戶更好地了解WoodenArm開發工具包,我們為用戶準備了一些有趣的游戲玩法,幫助他們快速開始使用WoodenArm學習(您可以參考我們的LewanSoul網站)。
責任編輯:wv
-
機械臂
+關注
關注
13文章
553瀏覽量
25323
發布評論請先 登錄
GZCOM-NET:為機械臂測試帶來高效無線解決方案!

如何使用PLC控制myCobot 320機械臂

使用myCobot 280機械臂結合ROS2系統搭建機械分揀站

深度解析!RK3568 加持機械臂是如何實現顏色識別與抓取的?

RK3568國產實驗箱+人工智能機械臂:跳舞、疊羅漢、夾方塊、積木搬運案例全解!
凌科電氣新品發布:揭秘機械臂高可靠連接器解決方案
“雙保險”鎖緊機制:YM28系列連接器為機械臂提供高牢靠的大電流連接

機械臂的高效運作,連接器起關鍵作用
工業產線機械臂數字孿生 流程工業應用

【原創】 drawbot 平面機械臂scara寫字畫畫機器人DIY教程貼
OrangePi AIpro應用:機械臂應用開發指南

工業機器人和機械臂的設計、功能和應用有哪些區別?
奧比中光推出2.0版大模型機械臂
大象機器人開源協作機械臂機械臂接入GPT4o大模型!






 工商網監
工商網監
評論