") 顆粒物傳動的機器人關節(jié)的設計及實驗測試
顆粒物傳動的機器人關節(jié)的設計及實驗測試

小顆粒物(particles,granular material)是我們生活中很常見的事物,工地上的沙礫,家中的大米,綠豆,還有咖啡豆,咖啡粉等,不勝枚舉。顆粒物有著很多獨特的性質(zhì),它們可以變得猶如巖石一般堅硬,也可以變得像液體一樣四處“流動”。基于顆粒物的物理特性,香港大學的陳永華教授帶領的研究團隊提出了“顆粒物傳動(particle transmission)”的概念,并基于“顆粒物傳動“原理設計開發(fā)了“雙足機器人關節(jié)”和“軟體機械手”,兩個研究成果均于去年發(fā)表在國際頂級刊物《IEEE機電一體化學報》(IEEE Transactions onMechatronics)。這種新的傳動方法啟發(fā)自液壓或者氣壓傳動,并且和后兩者相比有著它獨特的優(yōu)勢:1. 不需要專用的密封,不容易泄露;2. 對溫度變化不敏感;3. 可以有剛度的大范圍變化4. 吸收震動等。
1.顆粒物傳動和它在機器人中的應用
顆粒物在我們生活中非常常見,家中儲存的谷物豆類,咖啡豆咖啡粉,大街上的泥土沙礫,都屬于顆粒物的范疇。討論到顆粒物在機器人中的應用,就不得不提下面這個機器貓“機械手”。小編當初真的被這款用咖啡末和氣球做的“抓手”所震驚和吸引到。今天先不展開講述它的原理了,文末附有相關論文可以參考。
小編向大家介紹顆粒物在機器人中的另一個有趣并且有實用價值的應用,顆粒物在“流動”狀態(tài)下可以代替液壓和氣動來作為傳動介質(zhì),設計由顆粒物驅(qū)動的“雙足機器人”和“軟體抓手”。
類似機器貓手的”萬能抓手”
液壓和氣壓傳動都是機器人中常見的傳動方式,它是以流體(液體,氣體)為工作介質(zhì)進行能量傳遞和控制的一種傳動方式,這種傳動方式的優(yōu)點是設備執(zhí)行端的重量可以很輕,響應速度快,傳輸力大等。Boston dynamic的人形機器人Atlas采用的就是精妙設計的液壓系統(tǒng)驅(qū)動28個關節(jié),另外大家熟悉的軟體抓手則利用了壓縮氣體驅(qū)動。
液壓驅(qū)動和氣動的例子
顆粒物是一種很特別的物質(zhì),雖然每一顆單拎出來都是固體,但是一群顆粒物在松散的狀態(tài)下具有像液體一樣的流動性。比如我們抓一把沙子,一把豆子,平攤手掌的話會從指縫流走。同時,如果對松散的顆粒物施加壓力,那么顆粒物之間便會產(chǎn)生一種“阻塞(jamming)”效應,相互擠壓,使得顆粒物整體的又呈現(xiàn)固體的狀態(tài)。我們生活中常見的真空包裝綠豆可以很好的展示顆粒物的特性。
真空包裝的“阻塞”的綠豆和“流動”的綠豆
來自香港大學陳永華教授團隊聯(lián)想到了是否可以借助顆粒物的流動性,將它作為媒介,達到類似于液壓傳動或者氣體傳動的效果,從而進行動力的傳遞。應用顆粒物傳動設計了兩種機器人,行走機器人和軟體抓手,兩篇文章均于去年發(fā)表于機械工程頂刊《IEEE機電一體化學報》(IEEETransactions on Mechatronics)。
顆粒物傳動設計的基本原理
當然僅僅能夠模擬液壓或者氣壓傳動的效果還不夠,研究者分析了顆粒物傳動的一些特點:
1. 和氣體液體傳動相比,顆粒物傳動不需要過于嚴格的密封,因此可以簡化傳動結(jié)構的設計。
2. 通過“阻塞(jamming)”效應,顆粒物傳動可以進行剛度變化。
3. 顆粒物對于溫度和壓強的敏感程度低,更適用于嚴苛的環(huán)境。
4. 顆粒物傳動可以起到減震的效果。
研究者們設計了兩款具體的應用,來驗證顆粒物傳動這種想法的可行性,包括一個“小型雙足機器人”和“軟體機械手”。在這兩款設計中,均采用了顆粒物傳動的設計。今天小編就幫大家解讀一下顆粒物傳動是如何被應用于設計這兩種機器人系統(tǒng)的。
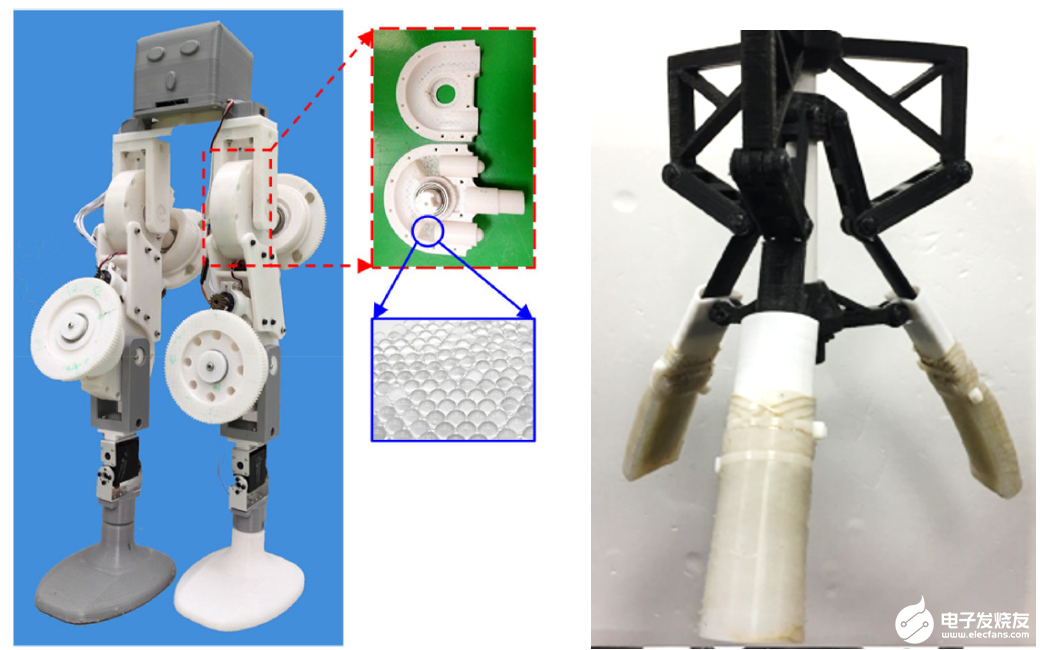
顆粒物傳統(tǒng)設計的雙足機器人和軟體抓手
我們可以先看一下顆粒物驅(qū)動的這兩個應用的展示,下一部分會帶大家了解具體的設計。文末附有相關論文的題目,鏈接,以及完整版視頻。
顆粒物傳動關節(jié)設計
顆粒物傳動的機器人關節(jié)
呆萌的雙足機器人
顆粒物傳動的軟體抓手抓取
2. 顆粒物傳動的應用設計及實驗測試
2.1顆粒物傳動的機器人關節(jié)的設計
如果將顆粒物填入一段封閉的腔體中,在一側(cè)給一個輸入力,那么力可以通過顆粒物傳到到另一側(cè)。研究者給出了四種典型的設計方案,除去最基本的直線傳動方案,通過不同的結(jié)構設計,顆粒物傳動還可以實現(xiàn)90度,180度,以及直線到旋轉(zhuǎn)運動的傳動。
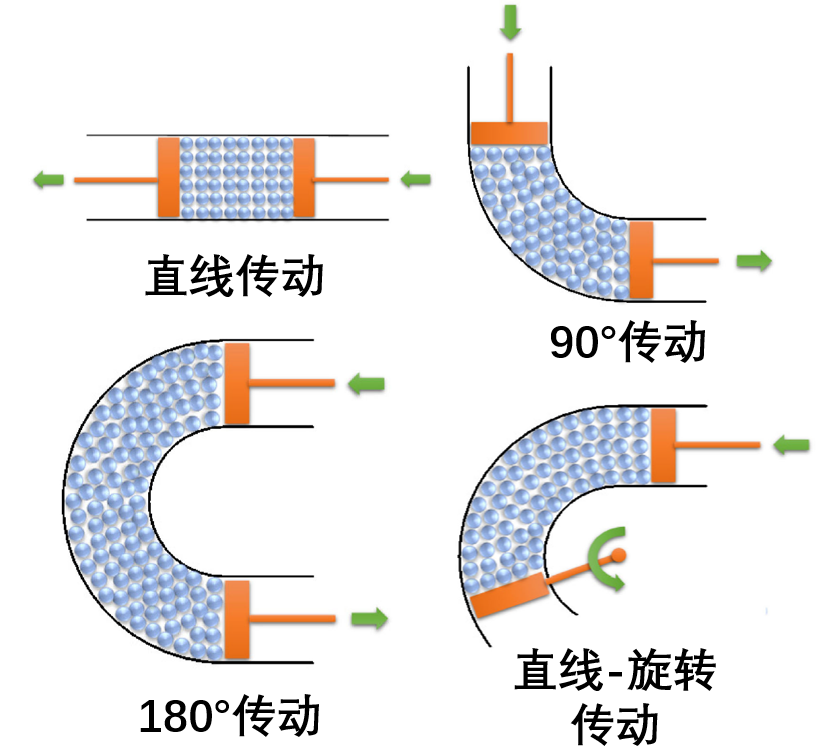
顆粒物傳動的幾種變化
顆粒物傳動比通常狀態(tài)下是小于1的,因此具有一定的緩沖效果,能夠減少輸出端的壓力,達到柔順輸出的效果。通過實驗測試得知,顆粒物傳動比隨著輸入力的速度增加而增大,同時,通過不同角度的傳動測試,顆粒物傳動受到重力的影響比較小。
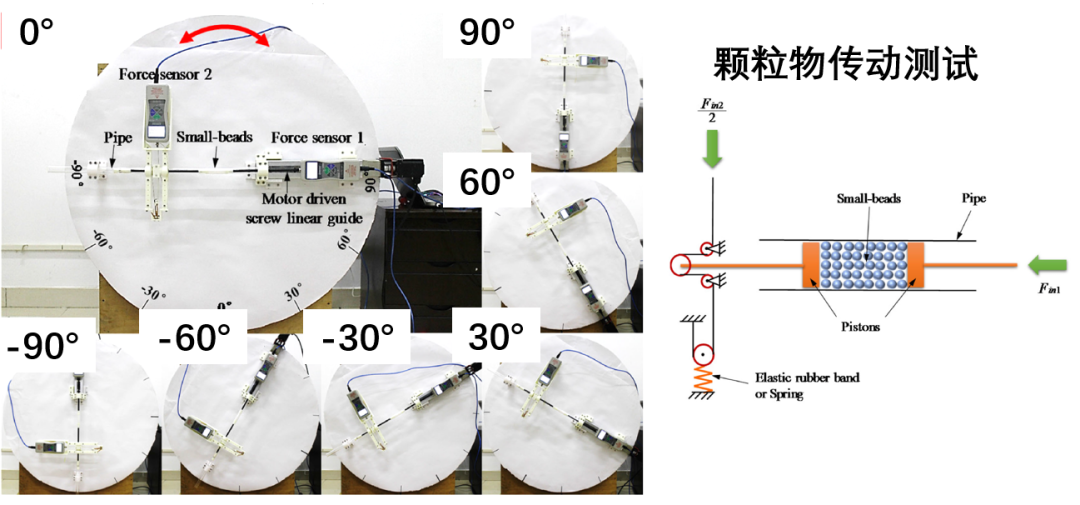
顆粒物傳動的測試
研究者設計的顆粒物傳動關節(jié)如圖,在一個U形管中填入一定的顆粒物(例如小玻璃珠),然后用兩個活塞密封它。活塞連接到一個輸出軸。兩個活塞由一個輸入的凸輪進行周期性的上下運動,從而帶動輸出軸旋轉(zhuǎn),這個旋轉(zhuǎn)運動即可以被用作機器人的關節(jié)。
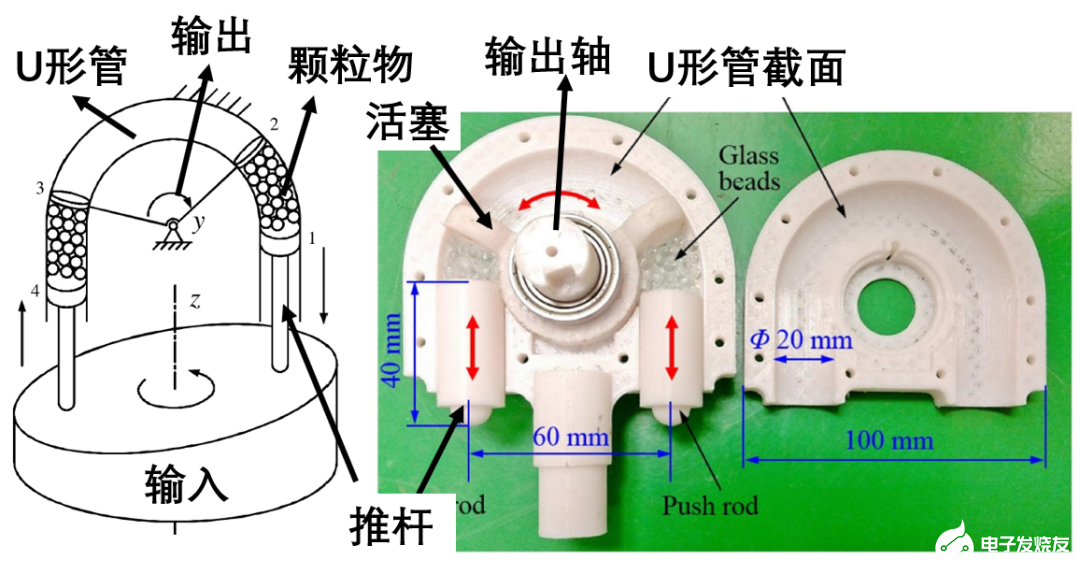
基于顆粒物傳動的機器人關節(jié)的設計
當顆粒物傳動設計的關節(jié)在遇到外界的大沖擊的時候,顆粒物之間會被互相擠壓,“流動”的顆粒物便會切換為“固態(tài)”,從而達到阻塞(jamming)-自鎖(self locking)的效果。研究者認為這種效應可以幫助機器人關節(jié)抵御外界的沖擊,并且提升關節(jié)的剛度。研究者們利用顆粒物傳動關節(jié)設計了一個雙足行走機器人,簡單展示了這種傳動方式應用于機器人的可行性。
雙足機器人行走步態(tài)
2.2顆粒物傳動的軟體抓手
顆粒物傳動的另一個應用便是軟體抓手了。傳統(tǒng)的氣動軟體手指由壓縮氣體驅(qū)動,基本原理就是,氣囊的底部是限制膨脹層,上面是彈性層,因此在氣壓的增大作用下,軟體手指會朝著限制層彎曲。假設把一個個的氣體分子具化,增大的壓強可以看作是氣體分子對于氣囊內(nèi)壁的沖擊力增大了。
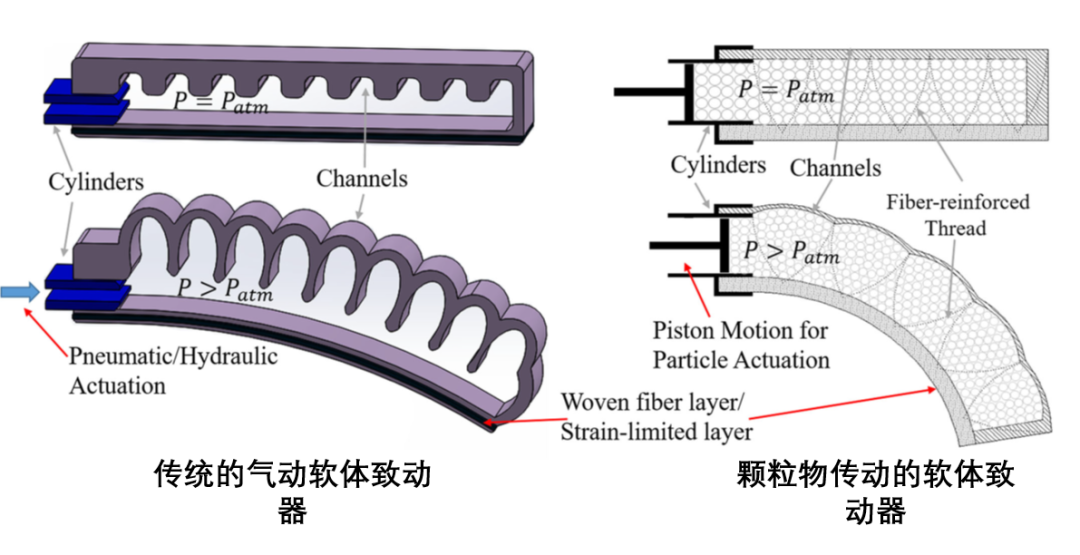
顆粒物傳動的軟體致動器原理
基于類似的原理,當把細小的顆粒物作為介質(zhì)用外力推入具有相同設計的彈性氣囊中,用一個外力去不斷推動外界的顆粒物進入氣囊,隨著顆粒物的體積的增加,氣囊壁收到的顆粒物的壓力越來越大,由此便會產(chǎn)生像是氣動軟體手指一樣的彎曲。但是相比于氣動,顆粒物驅(qū)動的軟體手指不需要很嚴苛的密封,并且隨著彎曲角度的增加,氣囊壁對顆粒物的反作用壓力也逐漸增大,從而顆粒物會發(fā)生阻塞效應(jamming),軟體手指的剛度也會成倍的增加。
通過一系列的抓取實驗測試,顆粒物驅(qū)動的軟體抓手也有著自適應的抓取能力,可以抓取多種物體。同時,由于顆粒物的阻塞效應使得軟體手指在最終狀態(tài)的剛度變化比較大,因此這款軟體抓手可以抓取比較重的物體。
顆粒物傳動的軟體抓手抓取
為了更準確的探討顆粒物傳動的軟體手指剛度變化情況,研究者利用三種不同的媒介進行了測試,即空氣,水和顆粒物。利用活塞推進相同體積的介質(zhì),可以看到,隨著擠壓體積的增加,在后期顆粒物傳動的軟體手指的剛度要遠遠優(yōu)于水和氣體驅(qū)動的。
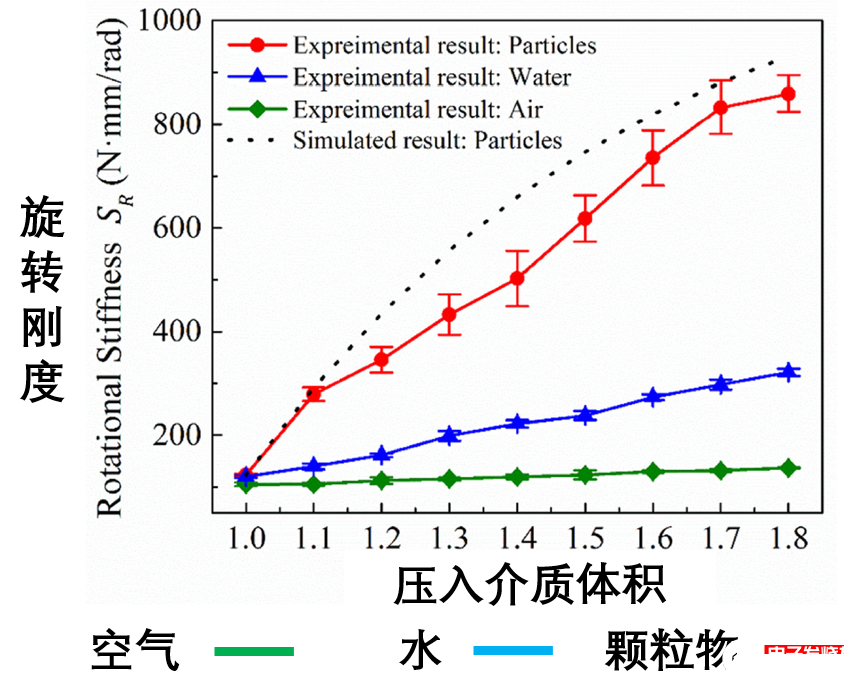
顆粒物傳動軟體手指的剛度和水,氣體的比較
3. 總結(jié)和展望
把顆粒物當作水,當作氣體來作為傳動介質(zhì)的想法真的很充滿想象力,這也正是科學研究的魅力,透過現(xiàn)象看本質(zhì),就可以發(fā)現(xiàn)一些原本毫無關聯(lián)的事物之間竟然有著某種底層的聯(lián)系。
善于思考的研究者們基于一些非常基礎的物理現(xiàn)象,比如今天所探討的顆粒物的流動性和阻塞效應,可以開發(fā)設計出具有創(chuàng)新的結(jié)構,甚至有一些超過傳統(tǒng)方法的優(yōu)點。
責任編輯:pj
-
機器人
+關注
關注
213文章
29620瀏覽量
212209 -
香港
+關注
關注
0文章
19瀏覽量
13578 -
氣體
+關注
關注
0文章
62瀏覽量
15810
發(fā)布評論請先 登錄
盤點#機器人開發(fā)平臺
基于多通道降壓穩(wěn)壓器的機器人關節(jié)供電系統(tǒng)設計
基于RISC-V內(nèi)核的嵌入式系統(tǒng)在機器人關節(jié)控制中的應用研究
舵機:機器人領域的“關節(jié)革命者”
海康機器人布局關節(jié)機器人業(yè)務
關節(jié)電機驅(qū)動,解鎖智能機器人 的“靈動” 密碼

霍爾元件DH49E在機器人的關節(jié)位置中的應用
伺服電動缸在人形機器人中的應用
機器人關節(jié)的靈動之源:揭秘舵機的技術奧秘
運用在機器人關節(jié)控制領域的磁性旋轉(zhuǎn)編碼器芯片-AME200

泰科機器人獲獎,開啟人形機器人關節(jié)模組新動力

激光顆粒物傳感器在環(huán)境監(jiān)測中的應用
機器人關節(jié)模組為何選擇雙編碼器設計?

專為人形機器人應用打造,助力具身智能行業(yè)發(fā)展,泰科機器人關節(jié)模組持續(xù)升級!

柔性機器人和剛性機器人有什么區(qū)別?






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論