") 上海發(fā)那科開發(fā)了機(jī)器人+3D視覺+AGV的解決方案
上海發(fā)那科開發(fā)了機(jī)器人+3D視覺+AGV的解決方案

紙箱及周轉(zhuǎn)箱是當(dāng)今的工廠中必不可少的物流載體,關(guān)于它們的拆垛應(yīng)用,有不少難題:垛形復(fù)雜多變、箱體種類繁多等。為解決上述難題,上海發(fā)那科開發(fā)了智能機(jī)器人自動化物流拆垛系統(tǒng),為您提供了一種機(jī)器人+3D視覺+AGV的解決方案。
該系統(tǒng)主要由1臺R-1000iA/80F機(jī)器人、1臺FANUC三維廣域傳感器和AGV小車等其他周邊配套設(shè)備構(gòu)成。AGV小車將堆有紙箱或周轉(zhuǎn)箱的托盤運至三維廣域傳感器下方,完成拍照、點云生成、位置獲取后,由機(jī)器人自動完成相應(yīng)的搬運拆垛過程,載有紙箱或周轉(zhuǎn)箱的托盤再由AGV小車運出。
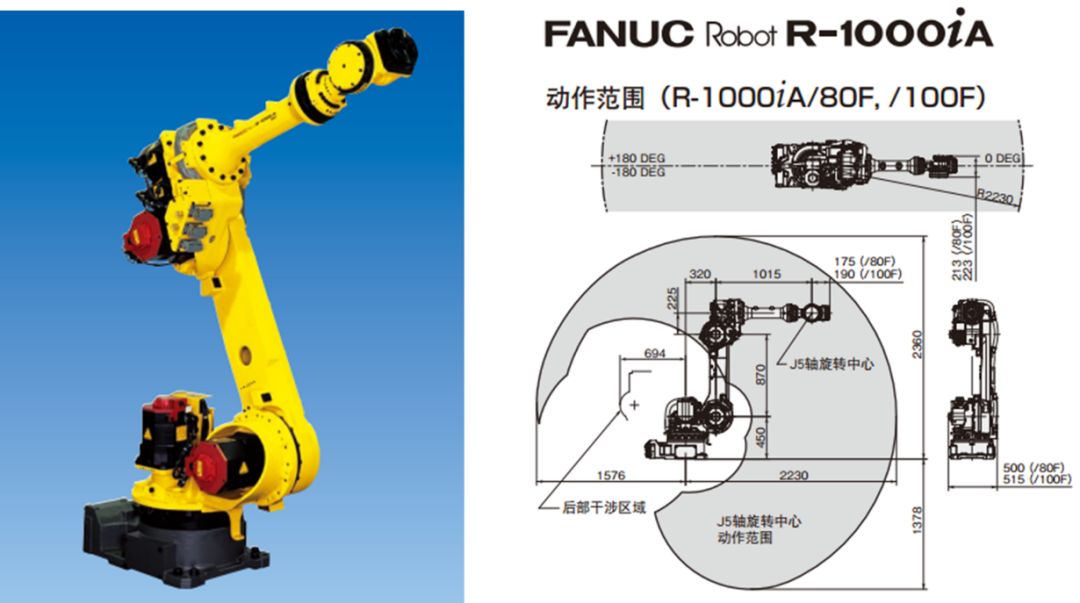
圖1 R-1000iA/80F
紙箱及周轉(zhuǎn)箱的拆垛采用的是FANUC中型機(jī)器人R-1000iA/80F,緊湊的機(jī)械結(jié)構(gòu)使它更擅長緊湊空間的高速碼垛和搬運工作。最大80Kg的負(fù)載能力則足以應(yīng)對紙箱及周轉(zhuǎn)箱的高速搬運。
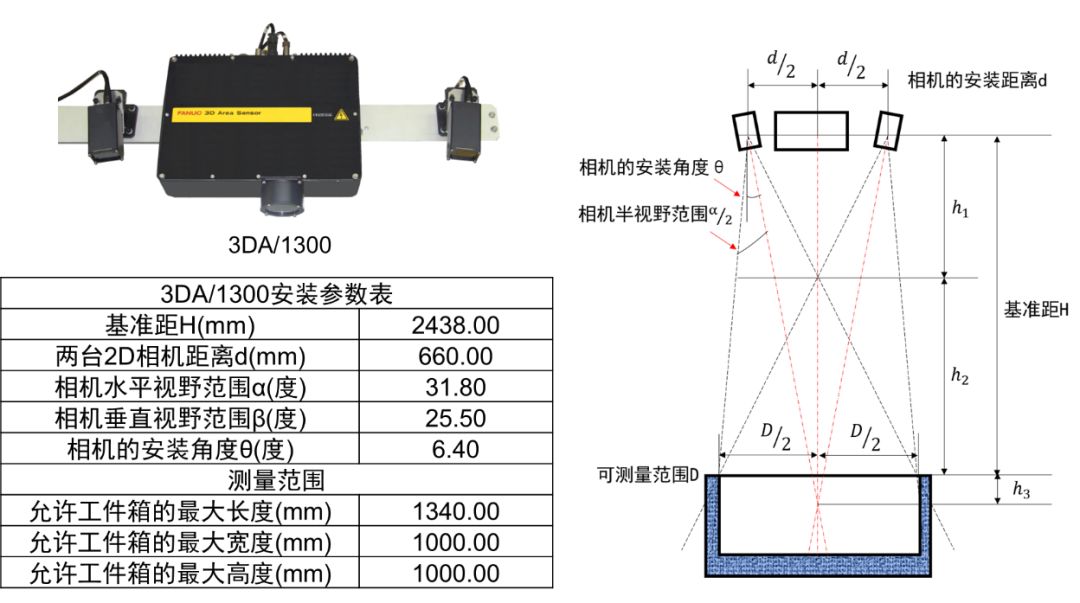
圖2 標(biāo)準(zhǔn)應(yīng)用場景下的3DA/1300
對箱體的識別定位采用的是FANUC三維廣域傳感器3DA/1300。三維廣域傳感器(3D Area Sensor)是FANUC iRVision中的核心成員之一,根據(jù)安裝方式、視野范圍和精度可選的還有3DV系列傳感器。
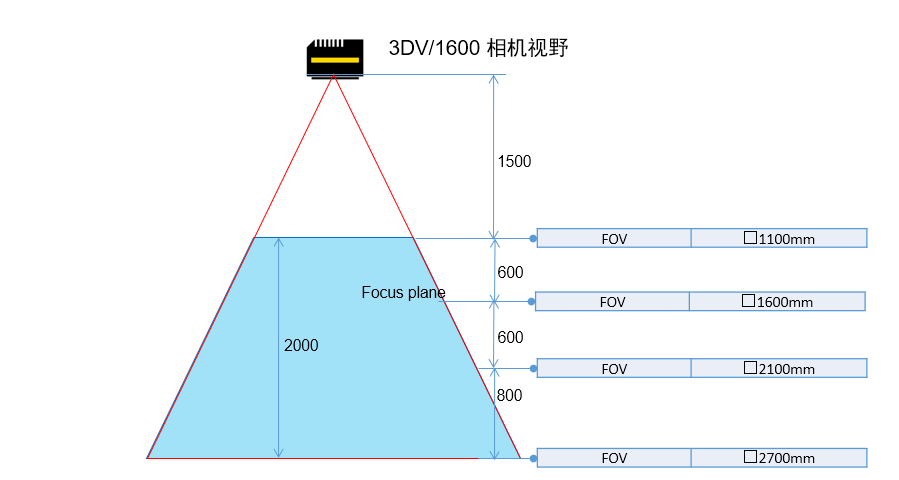
圖3 DV/1600傳感器的視野
3DA/1300在1340mm*1000mm的大視野下,利用雙目結(jié)構(gòu)光的原理,使用兩臺相機(jī)配合投影儀獲取到的差異圖像快速計算得到點云信息。
3D視覺系統(tǒng)與機(jī)器人高度集成,3DA/1300傳感器通過接口模塊(CCU和Multiplex)與主板連接,傳感器獲取的圖像和點云數(shù)據(jù)在機(jī)器人內(nèi)部計算,無需第三方設(shè)備或工控機(jī)。支持單臺機(jī)器人連接多臺3DA傳感器,可根據(jù)用戶定制的需要添加3DA傳感器和接口模塊。
機(jī)器人刷入模塊化的視覺軟件包后,即在機(jī)器人示教器上即可完成相機(jī)設(shè)置及校準(zhǔn)、視覺程序設(shè)定等一系列流程,在機(jī)器人TP程序內(nèi)使用指令調(diào)用視覺程序(圖4)即可實現(xiàn)視覺定位并引導(dǎo)機(jī)器人準(zhǔn)確抓取工件,視覺畫面可在實時示教器監(jiān)控或外接顯示器中實時監(jiān)控(圖5),當(dāng)機(jī)器人出現(xiàn)視覺方面報錯時,會直接在TP屏幕中輸出對應(yīng)錯誤代碼,方便快速找到錯誤原因,提高工作效率。

圖4 TP程序中調(diào)用視覺指令
圖5 視覺實時監(jiān)控
視覺軟件和硬件的高度集成和多功能的模塊化組合方便安裝、調(diào)試和維護(hù),減少項目周期。視覺硬件享受和機(jī)器人本體相同的質(zhì)保,一旦生產(chǎn)現(xiàn)場過程中任何軟硬件問題,F(xiàn)ANUC將第一時間派出經(jīng)驗豐富的工程師到達(dá)現(xiàn)場,解決后顧之憂。
視覺軟件中包含種類多樣的命令行工具也為3DA/1300的應(yīng)用帶來了更多的可能。平面測量工具(Area Sensor Plane Tool)是周轉(zhuǎn)箱拆垛中的必備工具。通過2D特征確定平面位置,結(jié)合點云獲取工件傾斜角度,在具有2D視覺高速度、高精度優(yōu)點的同時,又帶有3D視覺特有的角度識別能力,使得周轉(zhuǎn)箱即使在托盤上有一定的傾斜角度,也能準(zhǔn)確識別空間位置,完成抓取。iRVision中還有專門為紙箱拆垛開發(fā)的箱子檢出工具(Area Sensor Box Locator Tool),用于在混合拆垛中檢出指定尺寸的紙箱。兩個工具的組合使得視覺程序能夠應(yīng)對多變的垛形和表面形狀各異的周轉(zhuǎn)箱,實現(xiàn)真正的智能化拆垛。
同時三維廣域傳感器也是料框散堆件識別抓取(Bin Picking)的檢測設(shè)備之一,配合FANUC強(qiáng)大的工件列表管理功能、干涉避讓計算功能、料框偏移補(bǔ)償功能、接觸跳出功能,Bin Picking的應(yīng)用將更加簡單、高效。目前FANUC最新的R-30iB Plus控制器下搭載的該視覺系統(tǒng)還支持3D數(shù)模STL格式文件的直接導(dǎo)入,復(fù)雜工件的散堆取件調(diào)試將變得更加簡單。
圖6 紙箱拆垛
這套系統(tǒng)還有以下幾個特點:
換手臺使得機(jī)器人在周轉(zhuǎn)箱及紙箱的交替拆垛中切換自如
配合三維廣域傳感器的干涉避讓功能,保護(hù)機(jī)器人與周邊設(shè)備
機(jī)器人放置過程中視覺拍照檢出,節(jié)約每一秒
檢出結(jié)果示教器實時查看,簡化了視覺系統(tǒng)的調(diào)試及維護(hù)
本套智能機(jī)器人自動化物流拆垛系統(tǒng)具有可應(yīng)對混合拆垛、調(diào)試簡便、自動化程度高等優(yōu)點,能夠滿足物流行業(yè)及工廠上料中的拆垛需求,進(jìn)一步提高了生產(chǎn)效率。
責(zé)任編輯:pj
-
傳感器
+關(guān)注
關(guān)注
2565文章
52971瀏覽量
767185 -
3D
+關(guān)注
關(guān)注
9文章
2959瀏覽量
110727 -
AGV
+關(guān)注
關(guān)注
27文章
1438瀏覽量
42322
發(fā)布評論請先 登錄
人形機(jī)器人 3D 視覺路線之爭:激光雷達(dá)、雙目和 3D - ToF 誰更勝一籌?
盤點#機(jī)器人開發(fā)平臺
【「# ROS 2智能機(jī)器人開發(fā)實踐」閱讀體驗】視覺實現(xiàn)的基礎(chǔ)算法的應(yīng)用
昨日,杭州3D視覺傳感器公司獲數(shù)億元融資!

安森美智能機(jī)器人解決方案

發(fā)那科機(jī)器人A型控制柜急停板安全回路接線方法
機(jī)器人3D視覺傳感器需求爆發(fā)!英特爾、奧比中光領(lǐng)跑,百億市場爭奪戰(zhàn)開啟
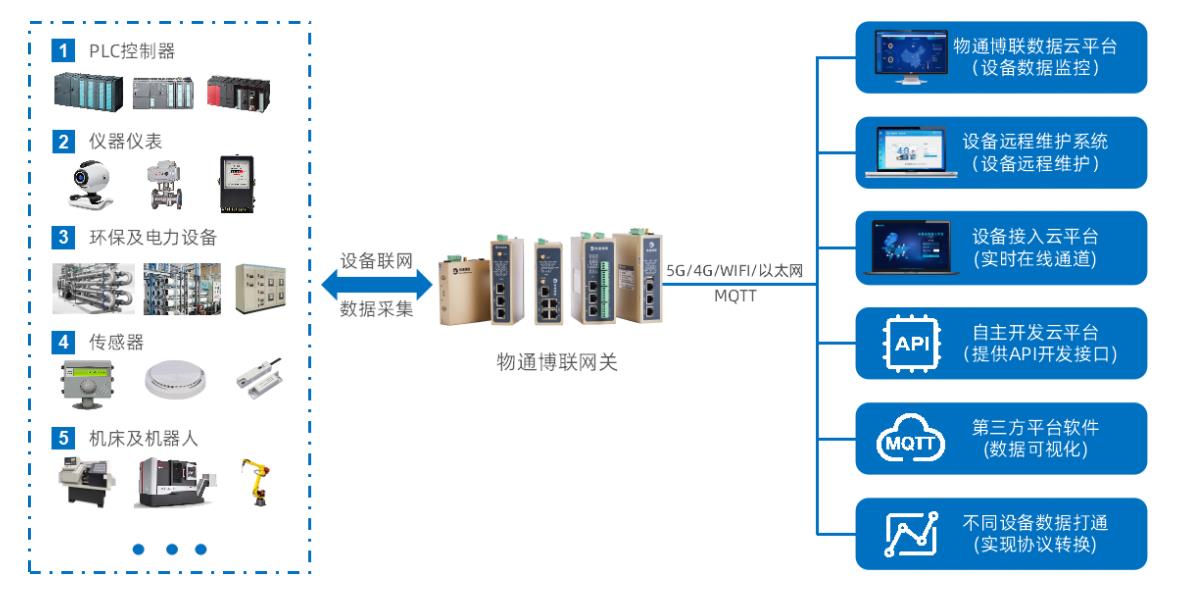
發(fā)那科機(jī)器人數(shù)據(jù)采集網(wǎng)關(guān)有哪些功能
禾賽科技推出面向機(jī)器人領(lǐng)域的迷你3D激光雷達(dá)
發(fā)那科ROBOGUIDE機(jī)器人仿真助手入門

解決方案 3D 視覺機(jī)器人賦能汽車制造新征程

禾賽將推出機(jī)器人領(lǐng)域迷你3D激光雷達(dá)

EtherNetIP轉(zhuǎn)Profinet網(wǎng)關(guān)連接發(fā)那科機(jī)器人配置實例解析

洛微科技重磅亮相CeMAT ASIA 2024,以3D視覺賦能智慧物流

微視傳感高性能3D視覺產(chǎn)品亮相2024上海機(jī)器視覺展





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論