") 讀取IBERT的自適應(yīng)環(huán)路代碼出現(xiàn)不同值的解決方案
讀取IBERT的自適應(yīng)環(huán)路代碼出現(xiàn)不同值的解決方案
描述
在讀取 IBERT 的自適應(yīng)環(huán)路代碼時,出現(xiàn)了與 DMONITOROUT 的期望值不同的值。
解決方案
對于 UltraScale+ GTY 收發(fā)器而言,簽名了一些 RX 均衡自適應(yīng)環(huán)路。
用戶指南的數(shù)字監(jiān)控器 (DMON) 部分向用戶展示了如何讀取自適應(yīng)環(huán)路的當前狀態(tài)。
對于無簽名自適應(yīng)環(huán)路,從 DMONITOROUT 端口讀取的值是量級值。
對于簽名自適應(yīng)環(huán)路(UT 環(huán)路除外),從 DMONITOROUT 端口讀取的值是一個雙零偏移二進制 (Excess-K) 值。
UT 環(huán)路的值范圍更廣,不使用雙零偏移二進制。
參見附帶的電子表格,查看雙零偏移二進制轉(zhuǎn)換表和 UT 自定義轉(zhuǎn)換表。
當用戶使用 IBERT 讀取自適應(yīng)環(huán)路代碼時,對簽名自適應(yīng)環(huán)路代碼進行后處理,以顯示為一個二進制補碼值。
在 IBERT 中,這樣做是為了簡化調(diào)試。
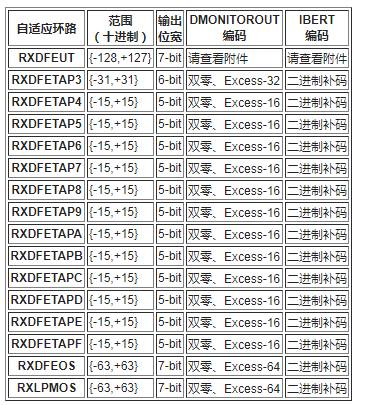
例如,OS 自適應(yīng)環(huán)路的簽名值范圍為 -63 至 +63。該范圍由一個 7 位的雙零 Excess-64(偏移二進制)值表示。
如果用戶手動將 OS 值重寫為代碼 7'b1000001,然后通過端口 DMONITOROUT[6:0] 讀取 DMON 自適應(yīng)值,端口輸出將讀取 7'b1000001。
但如果用戶使用 DFE_OS_LAST 通過 IBERT 讀取 OS 自適應(yīng)值,該值將是 7'b0000001。
下表列出了 UltraScale+ GTY 收發(fā)器的所有簽名自適應(yīng)值及其正確編碼。
未出現(xiàn)在表中的自適應(yīng)環(huán)路是無簽名的(例如 RXDFEAGC),因此 DMONITOROUT 和 IBERT 的輸出相同。
重要提示:該表適用于 Vivado 2017.1 及更新版本的 IBERT 設(shè)計。
編輯:hfy
-
UltraScale
+關(guān)注
關(guān)注
0文章
120瀏覽量
31817
發(fā)布評論請先 登錄
永磁同步電機自適應(yīng)高階滑模Type-2模糊控制
基于事件相機的統(tǒng)一幀插值與自適應(yīng)去模糊框架(REFID)
GLAD應(yīng)用:大氣像差與自適應(yīng)光學(xué)
六足仿生機器人地形自適應(yīng)步態(tài)規(guī)劃研究
貼片電感的感值代碼與讀取方法

基于自適應(yīng)優(yōu)化的高速交叉矩陣設(shè)計
高速串行總線系列-IBERT使用介紹

使用模擬IIC讀取ADS1115芯片,讀取AD值,出現(xiàn)的ADC值低4位一直為0,為什么?
SQL錯誤代碼及解決方案
UHF RFID自適應(yīng)射頻干擾對消技術(shù)
步進電機如何自適應(yīng)控制?步進電機如何細分驅(qū)動控制?
TDP1204和TMDS1204如何使用自適應(yīng)均衡

TUSB1146的自適應(yīng)均衡帶來的益處





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論