") 探究用雙定時(shí)器控制單片機(jī)輸出固定的數(shù)量的PWM脈沖!
探究用雙定時(shí)器控制單片機(jī)輸出固定的數(shù)量的PWM脈沖!
最近在逛論壇,看到幾個(gè)帖子都在咨詢?nèi)绾慰刂茊纹瑱C(jī)輸出固定的數(shù)量的PWM脈沖,用于控制電機(jī)的轉(zhuǎn)停,剛好前兩天本人也需要該功能做測(cè)試,我是輸出PWM給伺服電機(jī)驅(qū)動(dòng)器,驅(qū)動(dòng)器以位置模式工作,收到脈沖就控制電機(jī)轉(zhuǎn)動(dòng),如果需要精確控制電機(jī)轉(zhuǎn)過(guò)的角度,就需要給驅(qū)動(dòng)器輸入固定數(shù)量的脈沖。于是我便用STM32F031的雙定時(shí)器實(shí)現(xiàn)了該功能,下文便詳細(xì)描述。
我在進(jìn)行代碼編譯之前也在網(wǎng)絡(luò)上搜索過(guò)相應(yīng)的方法,總結(jié)起來(lái)一共五個(gè)方法:
1、單脈沖法,需要一個(gè)脈沖中斷一次,中斷次數(shù)多,影響效率
2、一個(gè)定時(shí)器輸出PWM,另一定時(shí)器使用輸入捕獲進(jìn)行中斷計(jì)數(shù),與方法1一樣,同樣需要頻繁的中斷
3、用主從定時(shí)器門控方式,比較繁瑣
4、用一個(gè)定時(shí)器(從)作為另一個(gè)定時(shí)器(主)的外部時(shí)鐘觸發(fā)源
5、高級(jí)定時(shí)器T1、T8的重復(fù)計(jì)數(shù)方式,RCR計(jì)數(shù)中斷,看手冊(cè)好像這種方式最簡(jiǎn)單,能滿足一部分人要求,缺點(diǎn)是寄存器只有8位,最多實(shí)現(xiàn)255個(gè)脈沖計(jì)數(shù)輸出。
我在最初時(shí)使用了第2和方法,該方法對(duì)于我來(lái)說(shuō)你叫簡(jiǎn)單,后來(lái)在寫這篇文章時(shí)選擇了第4個(gè)方法,總結(jié)起來(lái)還是4比較靠譜,但是這里的第2方法也描述一下,便于大家選擇。
方法2:
因?yàn)闂l件限制,干脆說(shuō)為了省事,我在原來(lái)用于其他功能的板子上進(jìn)行測(cè)試,因?yàn)橹婚_放了PB3和PB4,所以這里只好用TIM2和TIM3進(jìn)行測(cè)試。
TIM2用于產(chǎn)生PWM脈沖輸出,在輸出給驅(qū)動(dòng)器的同時(shí)將該脈沖也接到PB4,也就是TIM3的輸入口,這樣TIM3也能接收到TIM2發(fā)出的脈沖,TIM3只需要配置為輸入捕獲,并開啟中斷,便可以在每次脈沖到來(lái)進(jìn)入中斷,在TIM3的中斷中去計(jì)數(shù),達(dá)到需要的脈沖數(shù)便關(guān)閉TIM2便可。
首先依舊是初始化端口:
先貼一下time.h文件:
* 定義防止遞歸包含 ----------------------------------------------------------*/#ifndef _TIMER_H#define _TIMER_H /* 包含的頭文件 --------------------------------------------------------------*/#include "stm32f0xx.h" /* 宏定義 --------------------------------------------------------------------*/#define TIM6_COUNTER_CLOCK 1000000 //計(jì)數(shù)時(shí)鐘(1M次/秒) //預(yù)分頻值#define TIM6_PRESCALER_VALUE (SystemCoreClock/TIM6_COUNTER_CLOCK - 1)#define TIM6_PERIOD_TIMING (10 - 1) //定時(shí)周期(相對(duì)于計(jì)數(shù)時(shí)鐘:1周期 = 1計(jì)數(shù)時(shí)鐘) #define TIM2_COUNTER_CLOCK 24000000 //計(jì)數(shù)時(shí)鐘(24M次/秒) //預(yù)分頻值#define TIM2_PRESCALER_VALUE (SystemCoreClock/TIM2_COUNTER_CLOCK - 1) /* 函數(shù)申明 ------------------------------------------------------------------*/void Systick_Init(void);void Delay_ms(__IO uint32_t nTime);void TimingDelay_Decrement(void);void Delay(uint32_t
temp);voiddelay_us(uint32_t nus);void delay_init();
void TIMER_Initializes(void); void TIMDelay_N10us(uint16_t Times);void TIMDelay_Nms(uint16_t Times);void TIMDelay_Ns(uint16_t Times); void TIMER_PWM_GPIO_Configuration(void);void TIM2_CH2_PWM(uint32_t Freq, uint16_t Dutycycle);void TIMER_IC_Configuration(void); #endif /* _TIMER_H */
因?yàn)槲业臅r(shí)鐘初始化是單獨(dú)定義的,所以這里未進(jìn)行時(shí)鐘的初始化,在參考的我的代碼時(shí)需注意:
void TIMER_PWM_GPIO_Configuration(void){ GPIO_InitTypeDef GPIO_InitStructure; GPIO_InitStructure.GPIO_Pin = GPIO_Pin_3; //TIM2引腳 GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF; //復(fù)用模式 GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //高速輸出 GPIO_InitStructure.GPIO_OType = GPIO_OType_PP; //推完輸出 GPIO_InitStructure.
GPIO_PuPd = GPIO_PuPd_UP; //上拉 GPIO_Init(GPIOB, &GPIO_InitStructure); GPIO_PinAFConfig(GPIOB, GPIO_PinSource3, GPIO_AF_2); //復(fù)用配置 GPIO_InitStructure.GPIO_Pin = GPIO_Pin_4; //TIM3引腳 GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF; //復(fù)用模式 GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
//高速輸出 GPIO_InitStructure.GPIO_OType = GPIO_OType_PP; //推完輸出 GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_NOPULL; //無(wú)上下拉(浮空) GPIO_Init(GPIOB, &GPIO_InitStructure); GPIO_PinAFConfig(GPIOB, GPIO_PinSource4, GPIO_AF_1); }
配置定時(shí)器2,TIM2作為PWM的脈沖輸出:
/************************************************函數(shù)名稱 :TIM2_CH2_PWM功 能 :定時(shí)器2通道2輸出PWM參 數(shù) :Freq -------- 頻率 Dutycycle --- 占空比返 回 值 :無(wú)作 者 :吶咯密密*************************************************/void TIM2_CH2_PWM(uint32_t Freq, uint16_t Dutycycle){ TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure; TIM_OCInitTypeDef TIM_OCInitStructure; uint16_t tim2_period; uint16_t tim2_pulse; tim2_period = (uint16_t)(TIM2_COUNTER_CLOCK/Freq - 1); //計(jì)算出計(jì)數(shù)周期(決定輸出的頻率) tim2_pulse = (tim2_period + 1)*Dutycycle / 100; //計(jì)算出脈寬值(決定PWM占空比) /* TIM2時(shí)基單元配置 */ TIM_TimeBaseStructure.TIM_Prescaler = TIM2_PRESCALER_VALUE; //預(yù)分頻值 TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up;
//向上計(jì)數(shù)模式 TIM_TimeBaseStructure.TIM_Period = tim2_period; //定時(shí)周期(自動(dòng)從裝載寄存器ARR的值) TIM_TimeBaseStructure.TIM_ClockDivision = TIM_CKD_DIV1; //時(shí)鐘分頻因子 TIM_TimeBaseInit(TIM2, &TIM_TimeBaseStructure); /* TIM2通道2:PWM1模式配置 */ TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1; //輸出PWM1模式 TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable;
//使能輸出 TIM_OCInitStructure.TIM_Pulse = tim2_pulse; //脈寬值 TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High; //輸出極性 TIM_OC2Init(TIM2, &TIM_OCInitStructure); TIM_OC2PreloadConfig(TIM2, TIM_OCPreload_Enable); TIM_ARRPreloadConfig(TIM2, ENABLE); TIM_Cmd(TIM2, ENABLE); //初始化PWM。}
配置定時(shí)器3,作為捕獲輸入:
void TIMER_IC_Configuration(void){ TIM_ICInitTypeDef TIM_ICInitStructure; TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure; TIM_TimeBaseStructure.TIM_Prescaler = 1 - 1; //1分頻(與捕獲分頻相同) TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //向上計(jì)數(shù)模式 TIM_TimeBaseStructure.TIM_Period = 0xFFFFFFFF; //定時(shí)周期(自動(dòng)從裝載寄存器ARR的值) TIM_TimeBaseStructure.TIM_ClockDivision = TIM_CKD_DIV1; //時(shí)鐘分頻因子 TIM_TimeBaseInit(TIM3, &TIM_TimeBaseStructure);
TIM_ICInitStructure.TIM_Channel = TIM_Channel_1; //通道1 TIM_ICInitStructure.TIM_ICPolarity = TIM_ICPolarity_Falling; //捕獲極性 TIM_ICInitStructure.TIM_ICSelection = TIM_ICSelection_DirectTI; //捕獲選擇 TIM_ICInitStructure.TIM_ICPrescaler = TIM_ICPSC_DIV1; //捕獲分頻 TIM_ICInitStructure.TIM_ICFilter = 0; //捕獲濾波 TIM_ICInit(TIM3, &TIM_ICInitStructure); TIM3->SR = (uint16_t)~TIM_IT_CC1; //清除中斷標(biāo)志 TIM_Cmd(TIM3, ENABLE); //使能TIM3 TIM_ITConfig(TIM3, TIM_IT_CC1, ENABLE); //使能中斷}
關(guān)于定時(shí)器的通道要根據(jù)手冊(cè)定義來(lái)確定,我的只適配我的硬件。
這里需要著重說(shuō)一下預(yù)分頻TIM_Prescaler的值和捕獲分頻TIM_ICPrescaler的值要對(duì)應(yīng),在上面的代碼中這兩個(gè)值均為1,效果就是每來(lái)一個(gè)脈沖就會(huì)進(jìn)一次中斷。我們只需在中斷里進(jìn)行計(jì)數(shù),想要幾個(gè)脈沖就進(jìn)中斷幾次,達(dá)到需要的脈沖數(shù)就關(guān)閉TIM2。如下所示:
配置中斷:
NVIC_InitTypeDef NVIC_InitStructure; NVIC_InitStructure.NVIC_IRQChannel = TIM3_IRQn; //IRQ通道:定時(shí)器2 NVIC_InitStructure.NVIC_IRQChannelPriority = 0; NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; NVIC_Init(&NVIC_InitStructure);
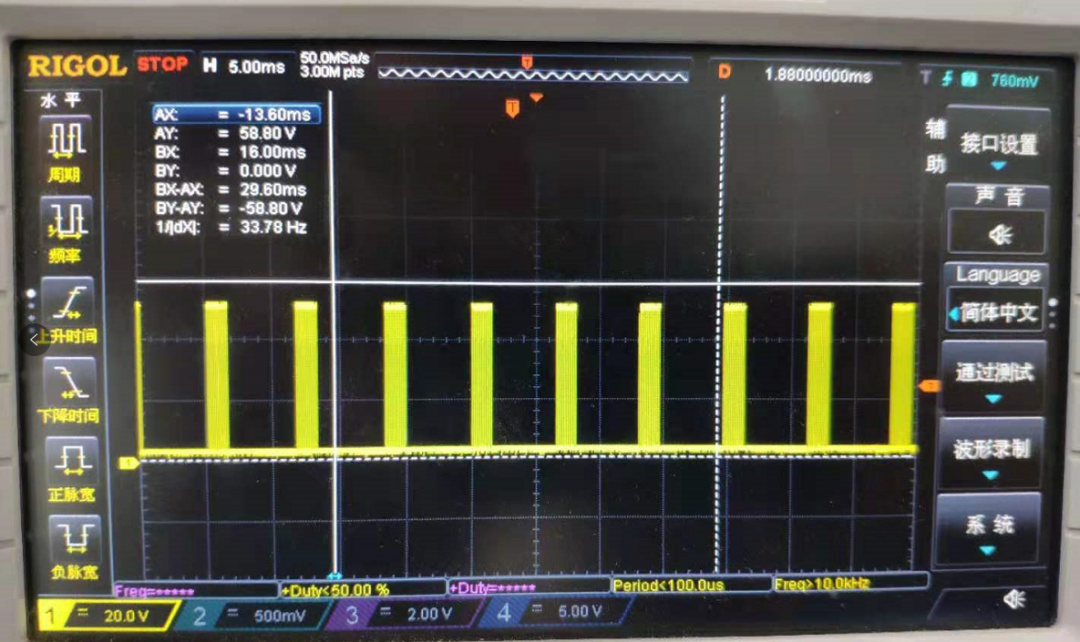
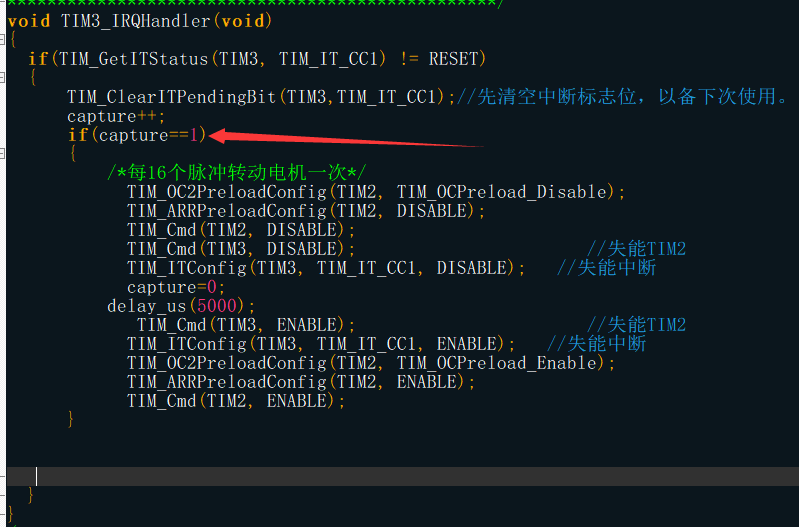
void TIM3_IRQHandler(void){ if(TIM_GetITStatus(TIM3, TIM_IT_CC1) != RESET) { TIM_ClearITPendingBit(TIM3,TIM_IT_CC1);//先清空中斷標(biāo)志位,以備下次使用。 capture++; if(capture==16) { /*每16個(gè)脈沖轉(zhuǎn)動(dòng)電機(jī)一次*/ TIM_OC2PreloadConfig(TIM2, TIM_OCPreload_Disable); TIM_ARRPreloadConfig(TIM2, DISABLE); TIM_Cmd(TIM2, DISABLE);
TIM_Cmd(TIM3, DISABLE); //失能TIM2 TIM_ITConfig(TIM3, TIM_IT_CC1, DISABLE); //失能中斷 capture=0; delay_us(5000); TIM_Cmd(TIM3, ENABLE); //失能TIM2 TIM_ITConfig(TIM3, TIM_IT_CC1, ENABLE); //失能中斷 TIM_OC2PreloadConfig(TIM2, TIM_OCPreload_Enable); TIM_ARRPreloadConfig(TIM2, ENABLE); TIM_Cmd(TIM2, ENABLE); } }}/*
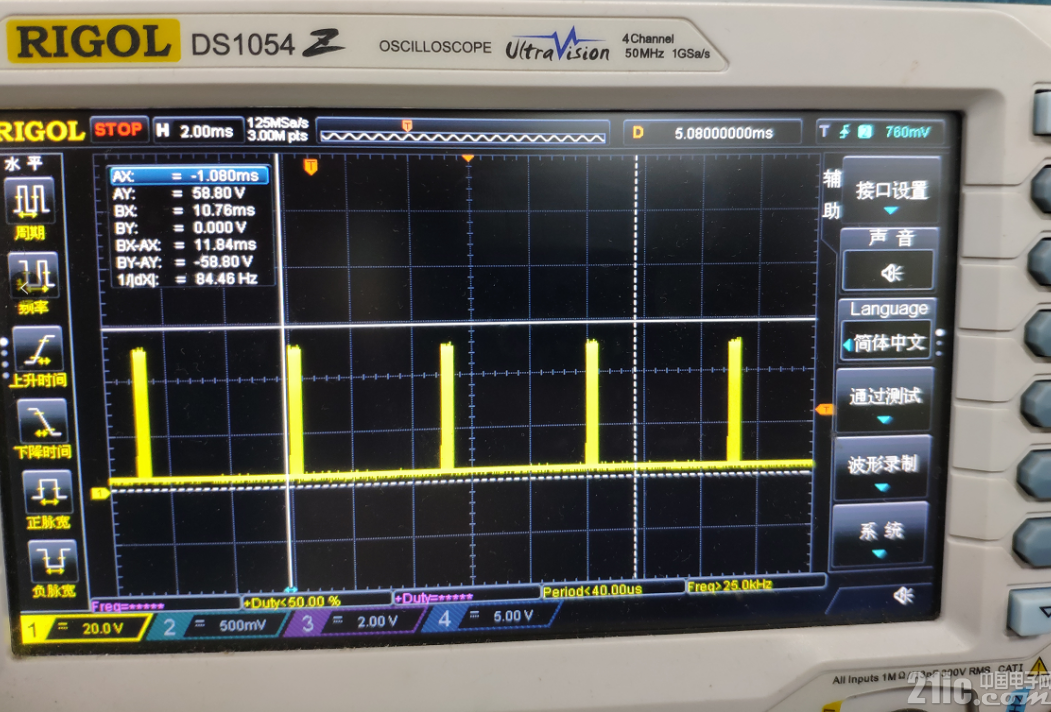
在TIM3的中斷函數(shù)中,我們定義一個(gè)變量capture,每次進(jìn)入中斷該值會(huì)加一,進(jìn)入16次中斷,也就是有16個(gè)脈沖輸入就會(huì)滿足條件進(jìn)入if()函數(shù),關(guān)閉TIM2和TIM3,延時(shí)5000us后再打開這兩個(gè)定時(shí)器,如此循環(huán)。可從示波器看現(xiàn)象:
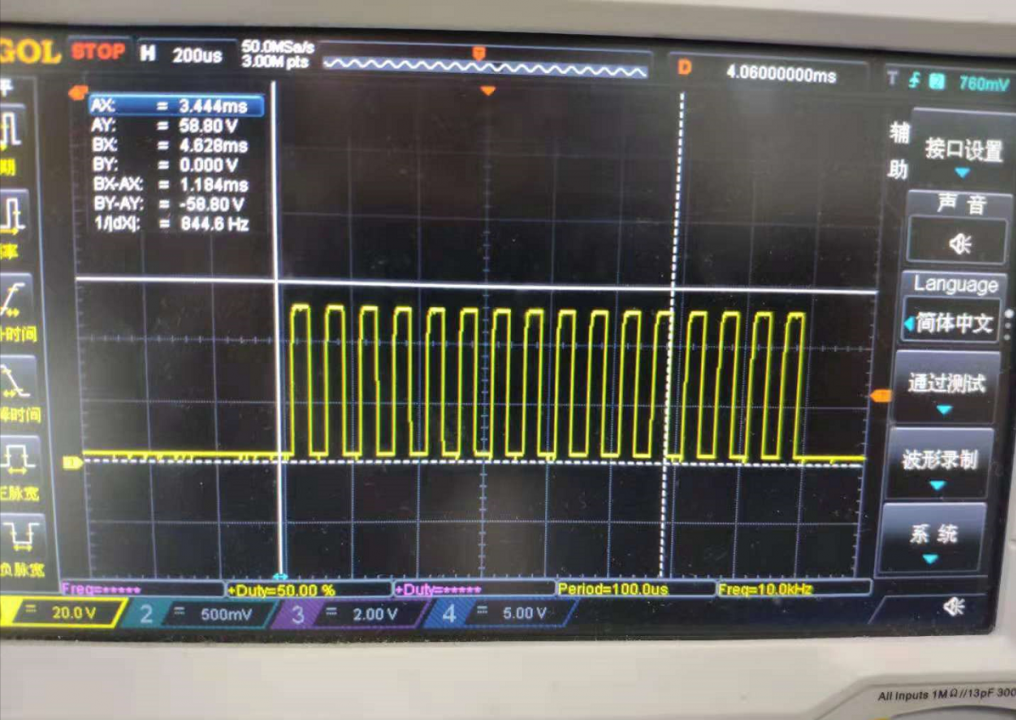
現(xiàn)在我們已經(jīng)完成了對(duì)TIM2的輸出固定個(gè)數(shù)脈沖的試驗(yàn),但是這種方式每個(gè)脈沖都進(jìn)一次中斷太麻煩,于是可以修改預(yù)分頻TIM_Prescaler的值為8-1,和捕獲分頻TIM_ICPrescaler的值為TIM_ICPSC_DIV8,便可8個(gè)脈沖進(jìn)一次中斷。
此時(shí)也將中斷函數(shù)里的判斷條件改為1,進(jìn)一次中斷便會(huì)關(guān)閉定時(shí)器,我們接上示波器看看現(xiàn)象:
通過(guò)示波器我們可以看到,雖然只進(jìn)了一次中斷,但是我們卻輸出8個(gè)脈沖,以此可減少進(jìn)入中斷的次數(shù)。至此,通過(guò)TIM3的輸入捕獲控制PWM脈沖數(shù)的試驗(yàn)就完成了。 方法4: 方法4是利用主從定時(shí)器進(jìn)行脈寬調(diào)制,不占用主時(shí)鐘,在代碼時(shí)間要求苛刻和多電機(jī)控制時(shí)非常實(shí)用,可以精準(zhǔn)控制。 GPIO的初始化和上文保持不變,僅改變TIM的配置: TIM2設(shè)置為主模式
/***********************TIM2初始化函數(shù)*****************************參數(shù):****************************************************//******u32 Cycle用于設(shè)定計(jì)數(shù)頻率(計(jì)算公式:Cycle=1Mhz/目標(biāo)頻率)******返回值:**************************************************//******無(wú)*****************************************************/void TIM2_config(uint32_t Cycle){ TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure; TIM_OCInitTypeDef TIM_OCInitStructure; TIM_TimeBaseStructure.TIM_Period = Cycle-1; //使用Cycle來(lái)控制頻率(f=48/(47+1)/Cycle) 當(dāng)Cycle為100時(shí)脈沖頻率為10KHZ TIM_TimeBaseStructure.TIM_Prescaler =47; //設(shè)置用來(lái)作為TIMx時(shí)鐘頻率除數(shù)的預(yù)分頻值 TIM_TimeBaseStructure.TIM_ClockDivision = TIM_CKD_DIV1; //設(shè)置時(shí)鐘分割:TDTS= Tck_tim TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //TIM向上計(jì)數(shù)模式 TIM_TimeBaseStructure.TIM_RepetitionCounter = 0;
//重復(fù)計(jì)數(shù),一定要=0!!! TIM_TimeBaseInit(TIM2, &TIM_TimeBaseStructure); TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1; //選擇定時(shí)器模式:TIM脈沖寬度調(diào)制模式1 TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; //比較輸出使能 TIM_OCInitStructure.TIM_Pulse = Cycle/2-1; //設(shè)置待裝入捕獲寄存器的脈沖值(占空比:默認(rèn)50%,這可也可以調(diào)節(jié)如果需要的話將它作為一個(gè)參數(shù)傳入即可) TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High; //輸出極性 TIM_OC2Init(TIM2, &TIM_OCInitStructure); //使能通道2 TIM_SelectMasterSlaveMode(TIM2, TIM_MasterSlaveMode_Enable);
//設(shè)置為主從模式 TIM_SelectOutputTrigger(TIM2, TIM_TRGOSource_Update); //選擇定時(shí)器2的觸發(fā)方式(使用更新事件作為觸發(fā)輸出) TIM_OC2PreloadConfig(TIM2, TIM_OCPreload_Enable); //使能通道2預(yù)裝載寄存器 TIM_ARRPreloadConfig(TIM2, ENABLE); //使能TIM2在ARR上的預(yù)裝載寄存器 } TIM3設(shè)置為從模式:
/***********************TIM3初始化函數(shù)*************************//****參數(shù):****************************************************//******u32 PulseNum用于設(shè)定脈沖數(shù)量****************************//****返回值:*************************************************//******無(wú)*****************************************************/ void TIM3_config(uint32_t PulseNum){ TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure; NVIC_InitTypeDef NVIC_InitStructure; RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3, ENABLE); TIM_TimeBaseStructure.TIM_Period = PulseNum-1; //設(shè)置自動(dòng)重裝載周期值 TIM_TimeBaseStructure.
TIM_Prescaler =0; TIM_TimeBaseStructure.TIM_ClockDivision = 0; TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; TIM_TimeBaseInit(TIM3, &TIM_TimeBaseStructure); TIM_SelectInputTrigger(TIM3, TIM_TS_ITR1); TIM_SelectSlaveMode(TIM3,TIM_SlaveMode_External1 );// 等同 TIM3->SMCR|=0x07 //設(shè)置從模式寄存器 TIM_ITConfig(TIM3,TIM_IT_Update,DISABLE); } 這里的TIM_SelectInputTrigger(TIM3, TIM_TS_ITR1);是設(shè)置為內(nèi)部觸發(fā),參數(shù)由手冊(cè)進(jìn)行獲取:

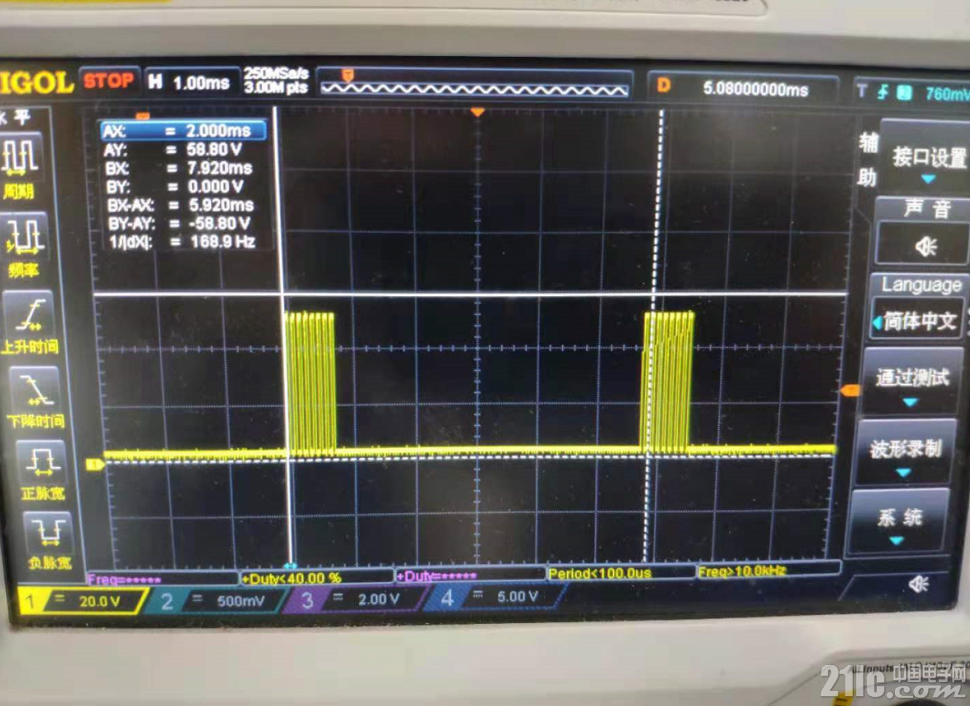
/************************脈沖輸出函數(shù)**************************//****參數(shù):****************************************************//******u32 Cycle用于設(shè)定計(jì)數(shù)頻率(計(jì)算公式:Cycle=1Mhz/目標(biāo)頻率)//******u32 PulseNum用于設(shè)定輸出脈沖的數(shù)量(單位:個(gè))************//****返回值:**************************************************//******無(wú)*****************************************************/void Pulse_output(uint32_t Cycle,uint32_t PulseNum){ TIM3_config(PulseNum); //設(shè)置脈沖數(shù)量 TIM_Cmd(TIM3, ENABLE); //使能TIM3(從定時(shí)器) TIM_ClearITPendingBit(TIM3,TIM_IT_Update); //清除中斷標(biāo)志位 TIM_ITConfig(TIM3,TIM_IT_Update,ENABLE); //使能更新中斷 TIM2_config(Cycle); //使能定時(shí)器2(主定時(shí)器) TIM_Cmd(TIM2, ENABLE); //使能定時(shí)器2// TIM_CtrlPWMOutputs(TIM2, ENABLE); //高級(jí)定時(shí)器一定要加上,主輸出使能}
void TIM3_IRQHandler(void){ if (TIM_GetITStatus(TIM3, TIM_IT_Update) != RESET) //TIM_IT_Update { TIM_ClearITPendingBit(TIM3, TIM_IT_Update); // 清除中斷標(biāo)志位 TIM_CtrlPWMOutputs(TIM2, DISABLE); //主輸出使能 TIM_Cmd(TIM2, DISABLE); //關(guān)閉定時(shí)器 TIM_Cmd(TIM3, DISABLE); //關(guān)閉定時(shí)器 TIM_ITConfig(TIM3, TIM_IT_Update, DISABLE); //關(guān)閉TIM2更新中斷 }} 當(dāng)TIM的CNT寄存器的值到達(dá)設(shè)定的Update值會(huì)觸發(fā)更新中斷,此時(shí)設(shè)定的脈沖數(shù)已輸出完畢,關(guān)閉TIM2和TIM3. 主函數(shù):
該代碼本人均已調(diào)通,原理部分過(guò)于繁雜,這里以本人能力可能無(wú)法解釋的清除,諸位可參考手冊(cè)或網(wǎng)絡(luò)獲取相關(guān)講解。
編輯:jq
-
單片機(jī)
+關(guān)注
關(guān)注
6064文章
44932瀏覽量
647493 -
脈沖
+關(guān)注
關(guān)注
20文章
901瀏覽量
96826 -
定時(shí)器
+關(guān)注
關(guān)注
23文章
3289瀏覽量
117336 -
Tim
+關(guān)注
關(guān)注
0文章
84瀏覽量
18254
原文標(biāo)題:深度:用雙定時(shí)器控制單片機(jī)輸出固定的數(shù)量的PWM脈沖!
文章出處:【微信號(hào):gh_c472c2199c88,微信公眾號(hào):嵌入式微處理器】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
MCU定時(shí)器/計(jì)數(shù)器
瑞薩RA8D1單片機(jī)輸出PWM實(shí)現(xiàn)方法

如何使用定時(shí)器在任意IO輸出PWM?
stm32同一個(gè)定時(shí)器不同的通道,可以不同時(shí)的輸出pwm波形嗎?
8位單片機(jī)HS16P2811產(chǎn)品概述

使用單片機(jī)實(shí)現(xiàn)直流電機(jī)的PWM調(diào)速控制原理圖
MCU與單片機(jī)的區(qū)別
單片機(jī)開發(fā):使用內(nèi)部看門狗定時(shí)器(WDT)還是外掛看門狗芯片?
驅(qū)動(dòng)激光器的窄脈沖是怎么產(chǎn)生的?
簡(jiǎn)述單片機(jī)定時(shí)器的工作原理
請(qǐng)問(wèn)如何使用定時(shí)器在任意IO輸出PWM?
定時(shí)器的工作方式介紹
STM32G4系列芯片定時(shí)器的延時(shí)輸出問(wèn)題






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論