 麻省理工學院利用機器學習技術對激光雷達數據進行更好的實時處理
麻省理工學院利用機器學習技術對激光雷達數據進行更好的實時處理

據麥姆斯咨詢介紹,激光雷達(LiDAR)是光探測和測距的縮寫,目前越來越普遍地應用于我們日常生活和工作之中,例如蘋果iPhone、iPad,以及服務機器人,它們利用激光測量距離,從而實現對周圍空間的精確測繪。此外,在衛星上,激光雷達被用來測量海拔高度;在自動駕駛汽車中,激光雷達被用于繪制道路和探測障礙物等。現在,麻省理工學院(MIT)的研究人員正在利用機器學習技術對激光雷達數據進行更好的實時處理。
眼前的問題:簡而言之,激光雷達功能強大,但數據處理速度慢。一款典型的激光雷達每秒可以產生數百萬個深度數據點,這很快就超出了汽車內置的數據處理能力,因此汽車上的系統將三維激光雷達數據壓縮為二維數據,在轉換過程中丟失了很多細節。
相比之下,麻省理工學院的研究人員正在使用端到端的機器學習框架,利用低分辨率的GPS地圖和原始的3D激光雷達數據。為了快速處理針對大量激光雷達數據進行深度學習的繁重計算負載,以實現實時自動駕駛,麻省理工學院的研究人員為深度學習模型設計了新的組件,從而更好地利用GPU。“我們已經從算法和系統兩個角度優化了解決方案,與現有的3D激光雷達方法相比,累計加速提高了大約9倍。”麻省理工學院博士生、該論文的共同主要作者Zhijian Liu在接受麻省理工學院Adam Conner Simons采訪時介紹說。
早期的測試數據顯示,麻省理工學院研發的系統減少了人類接管汽車的時間,并經受住了主要的傳感器故障。這在很大程度上是由于系統的“賭注對沖”:它估計任何給定預測的確定性,然后相應地對每個預測進行加權。這有助于保護系統免受誤導性輸入,例如惡劣天氣期間“凌亂”的激光雷達數據。“通過根據模型的不確定性融合控制預測,該系統可以適應突發事件。”麻省理工學院電氣工程和計算機科學教授、該論文資深作者之一Daniela Rus說道。
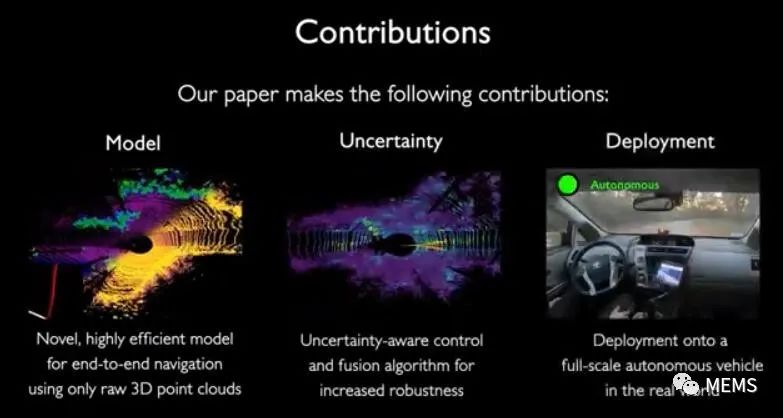
研究人員希望他們的工作將有助于為未來的自動駕駛系統鋪平道路。這種系統需要更少的人工干預,才能提供令人滿意的結果。“我們利用了無地圖駕駛方法的優點,并將其與端到端機器學習相結合,這樣我們就不需要程序員手動調整系統了。”該論文的另一位共同作者Alexander Amini介紹說。
下一步,研究人員正致力于通過天氣事件建模和道路上的其他車輛采集數據來擴展系統。
責任編輯:lq
-
機器學習
+關注
關注
66文章
8500瀏覽量
134497 -
激光雷達
+關注
關注
971文章
4230瀏覽量
192687 -
深度學習
+關注
關注
73文章
5560瀏覽量
122746
原文標題:麻省理工學院利用機器學習改進激光雷達數據處理
文章出處:【微信號:MEMSensor,微信公眾號:MEMS】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
Wolfspeed與紐約州立大學理工學院加強教育研究合作
偉創力與麻省理工學院 (MIT) 就其全新的“新制造倡議”(INM) 達成戰略合作
麻省理工學院香港校友會代表團到訪華沿機器人
美國加州理工學院:研究量子傳感技術可實現粒子時空高精度探測
佐治亞理工學院:毛囊級傳感器!研發可運動無感佩戴的AR控制傳感器
江蘇理工學院蒞臨漢得利BESTAR公司考察交流
加州理工學院開發出超100GHz時鐘速度的全光計算機
麻省理工學院對光子集成的量子發射器的光譜特性研究

麻省理工學院研發全新納米級3D晶體管,突破性能極限
麻省理工學院推出新型機器人訓練模型
VILA與其他模型在提供邊緣AI 2.0方面的表現
美國佐治亞理工學院一行蒞臨達實智能調研
貴州理工學院采購南京大展的DZ-STA200同步熱分析儀






 工商網監
工商網監
評論