 基于毫米波雷達的自動感應門應用的參考設計
基于毫米波雷達的自動感應門應用的參考設計

毫米波雷達具有敏銳的洞察力、探測范圍廣、測量數據精確、不受環境因素影響、穿透力強等高實用性的特點,在生產生活中應用極為廣泛。基于毫米波雷達傳感器的設備不僅為我們的生活帶來了很多便利,還保證了設備運行的安全和高效性,如商場自動感應門、電梯門等設備中均有應用。
早前,TI發布了多款工業級毫米波雷達傳感器,主要涵蓋了樓宇自動化、智能安防、液位監控、交通流量監控、工業機器人、自動感應門等領域。本期文章主要講述毫米波雷達在自動感應門上的應用。
(圖源:TI官網)
自動感應門工作原理
自動感應門主要由主控器、傳感器、驅動電機三部分組成。傳感器對進門或出門區域進行實時探測,當感應到有人員移動時,及時地將脈沖信號傳輸至主控器中由主控器分析處理,通過主控器激活電機完成開門操作。
基于IWR6843的自動感應門應用的參考設計
IWR6843是一款由TI發布的60-GHZ毫米波雷達傳感器,由于毫米波不受雨、霧、煙霧、光照強度等環境所約束,該傳感器主要在自動感應門領域的自動推拉門、車庫門、電梯門等實現多場景應用,推進大門朝節能化、智能化發展。TI還在IWR6843基礎上進行了升級,推出了IWR6843 ISK 、IWR6843 ODS 、IWR6843AOP ,每塊套件的性能略有不同。IWR6843 ISK 擁有水平方向120°、垂直方向30°的廣角感應區域。IWR6843 ODS 擁有水平方向120°、垂直方向120°的廣角感應區域。IWR6843AOP 擁有水平方向130°、垂直方向130°的廣角感應區域。并且TI就IWR6843 ISK給出了自動感應門參考設計TIDEP-01018。
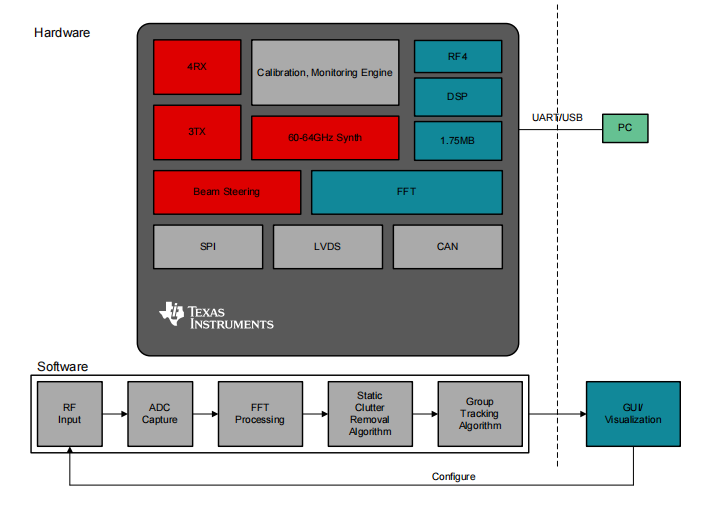
(主框架圖 圖源:TI)
IWR6843 ISK是一款60GHz~64GHz的毫米波傳感器套件,該套件可通過USB可實現數據訪問和供電,內部集成了4根接收天線、3根發射天線和DSP數據信號處理器。接口支持與MMWAVEICBOOST 和 DCA1000 匹配,方便進行數據訪問和開發。
TIDEP-01018參考設計是在IWR6843 ISK基礎上加入了ICB(工業載板),并且在IWR6843傳感器中集成了完整的雷達信號處理鏈。該設計可對水平方向120°,距離為5m內的人進行跟蹤、和速度采集,判斷人行走的方向進行開關門操作。
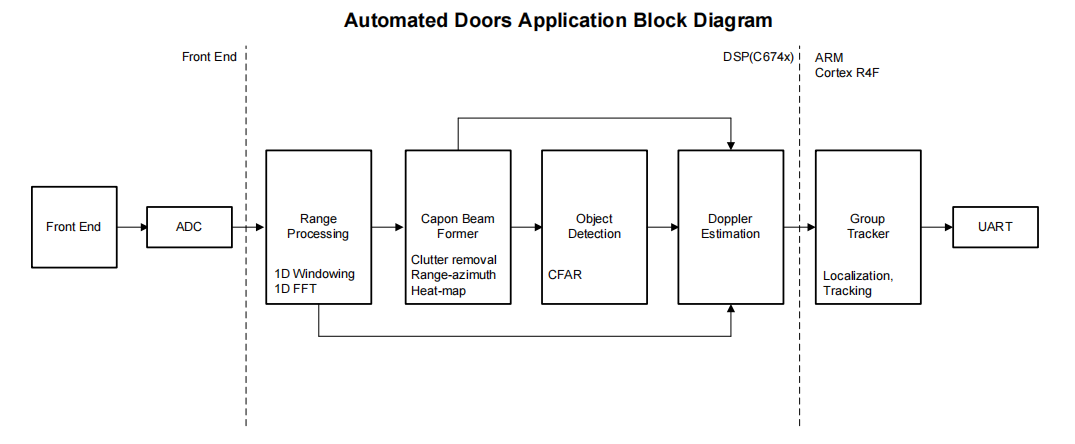
(基于IWR6843自動感應門工作流程 圖源:TI)
前端部分主要進行數模轉化,信號處理部分主要還是在DSP處理器中進行處理,經DSP處理后的數據得出距離、角度等信息,再進入ARM Cortex R4F處理器進行目標跟蹤。通過1D windowing 和 1D FFT進行探測范圍數據處理,在Capon波束形成器中去除靜態雜波,生成協方差矩陣和逆角普存儲在內存中,并將二者結合,構建距離矩陣熱圖。在距離矩陣熱圖內通過兩次CFAR算法進行目標檢測。主要是對檢測范圍內的每個水平方向角度檢測,將第一次的結果再通過CFAR檢測一次然后存在L2儲存中,完成目標檢測,該過程是為了精確鎖定目標。再通過多普勒效應對目標的距離和速度進行檢測,最后進入ARM Cortex R4F處理器對目標進行追蹤、判斷、輸出開門信號。
任務處理模式
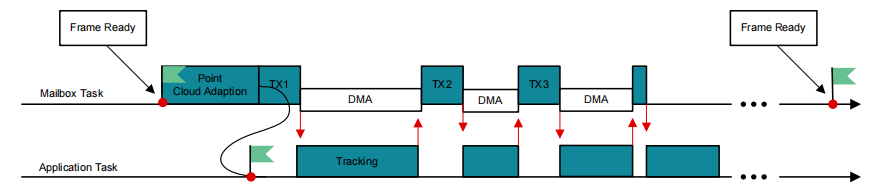
(任務處理模型 圖源:TI)
在任務處理方式上該設計有自己獨有的處理方式。如上圖所示,Mailbox為高優先級任務,Application為低優先級任務。在系統配置中,處于優先級的Mailbox任務會收到一個來自DSP準備就緒的信號,Mailbox任務會將相關數據復制于TCM中,并且與應用Application完成通信,給Application發布任務,創建傳輸幀頭,并且為框架內的每一部分啟動一個DMA進程。每當DMA與UART進行數據傳輸時,Mailbox任務就會產生一個低優先級的任務。當DMA進程結束時可以新增DMA,實現任務處理和DMA之間的并行性。
群跟蹤算法
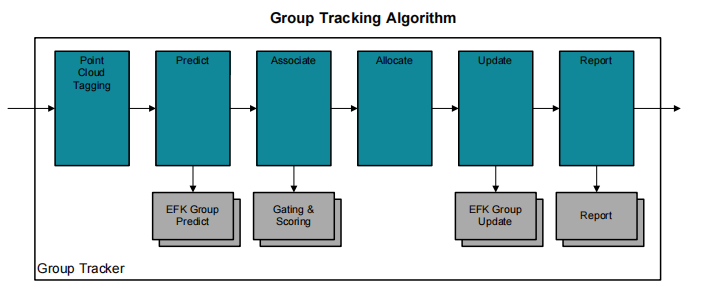
(群跟蹤算法流程圖 圖源:TI)
群跟蹤算法是TI在該設計中加入的智能算法,這個智能算法的加入,將開關門操作更合理化。通過程序任務先創建一個用來描述傳感器場景、行為、目標,具有配置參數算法的實例。然后該算法可對先前配置好的參數進行調用,每幀可調用一次。可建立多組數據建立數據庫。該算法可以通過測量輸入的極坐標數據,對目標進行追蹤。還可通過算法預測移動目標的距離、移動方向和速度來判斷是否需要進行開關門操作。
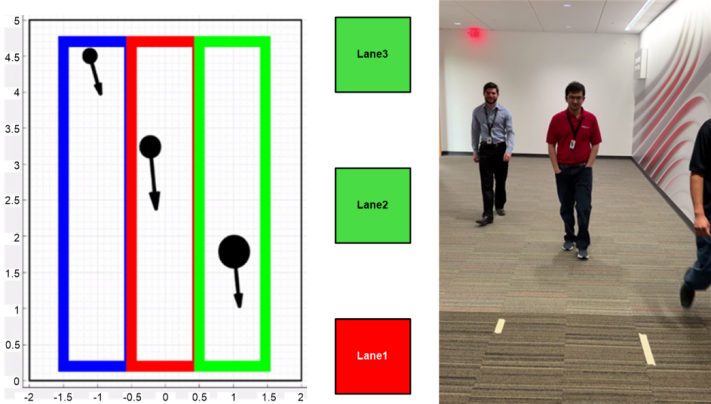
(圖源:TI)
該設計有什么優勢
降低出錯率,該設計加入了多次檢測功能和群跟蹤算法,能有效判斷移動的目標是否有開門需求。如傳感器檢測到入口有移動目標,僅僅只是路過不入門,則無需開門降低電力損耗和不必要的能源浪費。
靜態對象檢測功能,該設計可對靜態物體進行檢測,防止危險事故發生。例如,自動感應門門軌上有異物放置或人員停留,通過傳感器芯片的算法檢測后作出判斷,保證門處于打開狀態,避免事故發生。
低成本,該設計集成度高、檢測結果精準、檢測范圍廣,一個傳感器可覆蓋同一范圍內的多個門,能夠有效地降低電路設計的難度和成本。例如,現在市面上很多傳感只能1對1的使用,無形中提高了成本。
智能,該設計采用了毫米波雷達傳感器和多種檢測方法,能夠快速檢測移動目標的距離和速度,及時調整開門的時間和開門的速度,避免移動目標速度太快,到達門前時未及時開門,降低交互體驗。
總結
總的來說該設計將自動感應門變得智能化、高效化,靜態檢測功能提高了設備運行的安全性。還加入了群跟蹤算法使開關門操作更合理,減少電機的使用次數,降低了電能損耗。
早前,TI發布了多款工業級毫米波雷達傳感器,主要涵蓋了樓宇自動化、智能安防、液位監控、交通流量監控、工業機器人、自動感應門等領域。本期文章主要講述毫米波雷達在自動感應門上的應用。
(圖源:TI官網)
自動感應門工作原理
自動感應門主要由主控器、傳感器、驅動電機三部分組成。傳感器對進門或出門區域進行實時探測,當感應到有人員移動時,及時地將脈沖信號傳輸至主控器中由主控器分析處理,通過主控器激活電機完成開門操作。
基于IWR6843的自動感應門應用的參考設計
IWR6843是一款由TI發布的60-GHZ毫米波雷達傳感器,由于毫米波不受雨、霧、煙霧、光照強度等環境所約束,該傳感器主要在自動感應門領域的自動推拉門、車庫門、電梯門等實現多場景應用,推進大門朝節能化、智能化發展。TI還在IWR6843基礎上進行了升級,推出了IWR6843 ISK 、IWR6843 ODS 、IWR6843AOP ,每塊套件的性能略有不同。IWR6843 ISK 擁有水平方向120°、垂直方向30°的廣角感應區域。IWR6843 ODS 擁有水平方向120°、垂直方向120°的廣角感應區域。IWR6843AOP 擁有水平方向130°、垂直方向130°的廣角感應區域。并且TI就IWR6843 ISK給出了自動感應門參考設計TIDEP-01018。
(主框架圖 圖源:TI)
IWR6843 ISK是一款60GHz~64GHz的毫米波傳感器套件,該套件可通過USB可實現數據訪問和供電,內部集成了4根接收天線、3根發射天線和DSP數據信號處理器。接口支持與MMWAVEICBOOST 和 DCA1000 匹配,方便進行數據訪問和開發。
TIDEP-01018參考設計是在IWR6843 ISK基礎上加入了ICB(工業載板),并且在IWR6843傳感器中集成了完整的雷達信號處理鏈。該設計可對水平方向120°,距離為5m內的人進行跟蹤、和速度采集,判斷人行走的方向進行開關門操作。
(基于IWR6843自動感應門工作流程 圖源:TI)
前端部分主要進行數模轉化,信號處理部分主要還是在DSP處理器中進行處理,經DSP處理后的數據得出距離、角度等信息,再進入ARM Cortex R4F處理器進行目標跟蹤。通過1D windowing 和 1D FFT進行探測范圍數據處理,在Capon波束形成器中去除靜態雜波,生成協方差矩陣和逆角普存儲在內存中,并將二者結合,構建距離矩陣熱圖。在距離矩陣熱圖內通過兩次CFAR算法進行目標檢測。主要是對檢測范圍內的每個水平方向角度檢測,將第一次的結果再通過CFAR檢測一次然后存在L2儲存中,完成目標檢測,該過程是為了精確鎖定目標。再通過多普勒效應對目標的距離和速度進行檢測,最后進入ARM Cortex R4F處理器對目標進行追蹤、判斷、輸出開門信號。
任務處理模式
(任務處理模型 圖源:TI)
在任務處理方式上該設計有自己獨有的處理方式。如上圖所示,Mailbox為高優先級任務,Application為低優先級任務。在系統配置中,處于優先級的Mailbox任務會收到一個來自DSP準備就緒的信號,Mailbox任務會將相關數據復制于TCM中,并且與應用Application完成通信,給Application發布任務,創建傳輸幀頭,并且為框架內的每一部分啟動一個DMA進程。每當DMA與UART進行數據傳輸時,Mailbox任務就會產生一個低優先級的任務。當DMA進程結束時可以新增DMA,實現任務處理和DMA之間的并行性。
群跟蹤算法
(群跟蹤算法流程圖 圖源:TI)
群跟蹤算法是TI在該設計中加入的智能算法,這個智能算法的加入,將開關門操作更合理化。通過程序任務先創建一個用來描述傳感器場景、行為、目標,具有配置參數算法的實例。然后該算法可對先前配置好的參數進行調用,每幀可調用一次。可建立多組數據建立數據庫。該算法可以通過測量輸入的極坐標數據,對目標進行追蹤。還可通過算法預測移動目標的距離、移動方向和速度來判斷是否需要進行開關門操作。
(圖源:TI)
該設計有什么優勢
降低出錯率,該設計加入了多次檢測功能和群跟蹤算法,能有效判斷移動的目標是否有開門需求。如傳感器檢測到入口有移動目標,僅僅只是路過不入門,則無需開門降低電力損耗和不必要的能源浪費。
靜態對象檢測功能,該設計可對靜態物體進行檢測,防止危險事故發生。例如,自動感應門門軌上有異物放置或人員停留,通過傳感器芯片的算法檢測后作出判斷,保證門處于打開狀態,避免事故發生。
低成本,該設計集成度高、檢測結果精準、檢測范圍廣,一個傳感器可覆蓋同一范圍內的多個門,能夠有效地降低電路設計的難度和成本。例如,現在市面上很多傳感只能1對1的使用,無形中提高了成本。
智能,該設計采用了毫米波雷達傳感器和多種檢測方法,能夠快速檢測移動目標的距離和速度,及時調整開門的時間和開門的速度,避免移動目標速度太快,到達門前時未及時開門,降低交互體驗。
總結
總的來說該設計將自動感應門變得智能化、高效化,靜態檢測功能提高了設備運行的安全性。還加入了群跟蹤算法使開關門操作更合理,減少電機的使用次數,降低了電能損耗。
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
毫米波雷達
+關注
關注
107文章
1097瀏覽量
65322
發布評論請先 登錄
相關推薦
熱點推薦
移動感應門為何紛紛擁抱LED全息屏?一場科技與體驗的雙重革新
在商業空間、高端展廳、智慧場館的入口處,一扇扇搭載LED全息屏的移動感應門正成為新的視覺焦點。這些門體不再僅僅是通道,而是集交互、展示、引流于一體的智能終端。這一現象背后,是LED全息屏技術突破與市場需求升級的共振,更是空間設計理念從功能性向體驗性跨越的必然選擇。

自動駕駛毫米波雷達之間會相互干擾嗎?
[首發于智駕最前沿微信公眾號]隨著智能網聯汽車的發展,交通環境感知技術(包括毫米波雷達、激光雷達和攝像頭等)日益成為自動駕駛的核心組成部分。在這些傳感器中,


毫米波雷達信號的傳輸特性
1. 引言 毫米波雷達作為一種高精度的探測技術,其信號的傳輸特性對于系統的性能至關重要。本文將探討毫米波雷達信號的傳輸特性,包括其傳播損耗、多徑效應、雨衰等,并分析這些特性對
毫米波雷達的基頻和調制技術 毫米波雷達在機器人導航中的應用
毫米波雷達的基頻和調制技術 毫米波雷達的基頻通常指的是其工作頻段,一般在30GHz至300GHz之間。在這個頻段內,毫米波
毫米波雷達與超聲波雷達的區別
毫米波雷達與超聲波雷達的區別 在現代科技領域,傳感器技術扮演著至關重要的角色,尤其是在自動駕駛、工業自動化和機器人技術等領域。

毫米波雷達感應Demo
1硬件介紹1.1模塊介紹1.1.160GHz毫米波雷達模塊-BGT60TR13CBGT60TR13C具有小巧的外形和低功耗,該特點可為許多應用帶來了創新、直觀的傳感功能,可用于監控、照明和智能家電中

毫米波雷達與超聲波雷達的區別是什么
毫米波雷達與超聲波雷達是兩種不同的雷達技術,它們在工作原理、性能特點、應用領域等方面存在一定的差異。以下是對這兩種雷達技術的介紹: 工作原理
毫米波雷達與多普勒雷達區別是什么
毫米波雷達與多普勒雷達是兩種不同類型的雷達系統,它們在工作原理、應用領域和性能特點等方面存在明顯的區別。 工作原理 毫米波
簡述毫米波雷達的結構、原理和特點
毫米波雷達是一種利用毫米波段電磁波進行探測和測量的雷達系統,具有高分辨率、高靈敏度、高抗干擾能力等特點,在軍事、航空、航天、交通、氣象等領域





 工商網監
工商網監
評論