") 純視覺VS多傳感器融合
純視覺VS多傳感器融合

自1939年通用汽車公司面向全球展示世界上第一輛自動(dòng)駕駛概念車,此后的八十多年里,全球各大科技公司和車企陸續(xù)將傳感器、攝像頭、計(jì)算芯片、存儲(chǔ)芯片等塞進(jìn)車子里,并不斷在軌道、沙漠等特定場(chǎng)景下去嘗試自動(dòng)駕駛。時(shí)至今日,廠商已經(jīng)在一點(diǎn)點(diǎn)讓自動(dòng)駕駛滲透到家用車市場(chǎng),并致力于在這個(gè)領(lǐng)域?qū)崿F(xiàn)更高級(jí)別的自動(dòng)駕駛。
然而,我們也能看到,在技術(shù)和方案推進(jìn)的過程中,自動(dòng)駕駛的實(shí)現(xiàn)方式出來了明顯的“派系之爭(zhēng)”。一派認(rèn)為應(yīng)該走視覺與雷達(dá)的融合路線;另一派則認(rèn)為純視覺實(shí)現(xiàn)就足夠了。派系之爭(zhēng)的根源是當(dāng)前每個(gè)廠商對(duì)自動(dòng)駕駛都有自己的理解,且都取得了一定的效果。當(dāng)然,通過貿(mào)澤電子網(wǎng)站上在售的、各種應(yīng)用于自動(dòng)駕駛的元器件,我們也發(fā)現(xiàn)了兩個(gè)派系之間的一些共同點(diǎn),比如靈活設(shè)計(jì)和性能冗余等。那么,接下來就讓我們展開聊一聊。
純視覺 VS 多傳感器融合
對(duì)于自動(dòng)駕駛,還有很多其他的叫法,比如無人駕駛、電腦駕駛汽車或者輪式機(jī)器人等等。這些名稱的核心要義是通過計(jì)算機(jī)與人工智能技術(shù)的融合,代替人類駕駛員,讓車子自行完成完整、安全、有效的駕駛行為。無疑,這種智能化的駕乘體驗(yàn)將會(huì)成為新時(shí)代汽車一個(gè)重要的賣點(diǎn),吸引全球科技巨頭和車企紛紛投資布局。根據(jù)市場(chǎng)調(diào)研機(jī)構(gòu)IHS Markit的預(yù)測(cè)數(shù)據(jù),2022年全球自動(dòng)駕駛汽車市場(chǎng)規(guī)模將達(dá)到1,629億美元,同比增長14%左右,預(yù)計(jì)2030年全球自動(dòng)駕駛汽車市場(chǎng)規(guī)模將達(dá)到32,197億美元,年復(fù)合增長率高達(dá)45.21%。
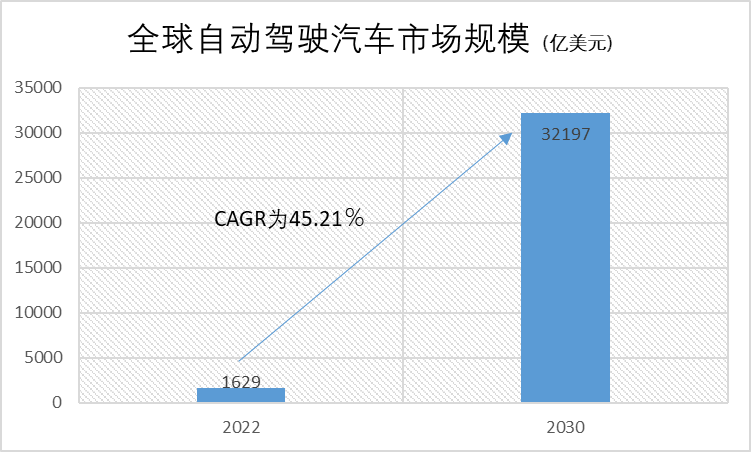
圖1:全球自動(dòng)駕駛汽車市場(chǎng)規(guī)模
(數(shù)據(jù)源自:IHS Markit)
在自動(dòng)駕駛的設(shè)想下,當(dāng)選定目的地后,汽車會(huì)利用導(dǎo)航系統(tǒng)規(guī)劃最佳路線,到達(dá)目的地,期間人類駕乘人員不需要為此分心,可以盡情享受科技帶來的便捷和舒適。然而,當(dāng)人類駕駛汽車時(shí),我們都會(huì)用“眼觀六路耳聽八方”來描述駕駛員的狀態(tài),因此自動(dòng)駕駛汽車需要具備比這更強(qiáng)的感知性能。環(huán)境感知與精準(zhǔn)定位、路徑規(guī)劃、線控執(zhí)行一起并稱自動(dòng)駕駛四大核心技術(shù)。當(dāng)汽車被置于社會(huì)應(yīng)用場(chǎng)景下時(shí)安全可靠的感知是不可或缺的。
在環(huán)境感知上,純視覺方案僅依靠攝像頭搜集環(huán)境信息,然后將圖片傳輸?shù)接?jì)算芯片進(jìn)行分析,比較像人類駕駛車輛,通過眼睛來捕捉周圍的信息,然后傳輸給大腦做決策。當(dāng)然,純視覺+AI的方案比人眼的視角更廣,通過大量的圖片信息讓汽車內(nèi)部的計(jì)算系統(tǒng)擁有以車子為中心的“上帝視角”。純視覺方案的優(yōu)點(diǎn)主要是,實(shí)現(xiàn)成本相對(duì)更低,更接近人類駕駛,通過高分辨率、高幀率的成像技術(shù)獲取的環(huán)境信息更加豐富;缺點(diǎn)主要是,攝像頭捕捉環(huán)境信息容易受到環(huán)境光的干擾,且純視覺方案對(duì)于圖像的處理更依賴訓(xùn)練,難免出現(xiàn)環(huán)境認(rèn)知的“死角”。目前,采用純視覺方案實(shí)現(xiàn)自動(dòng)駕駛的企業(yè)主要有特斯拉、百度和極氪等。
“多傳感器融合”方案則是通過攝像頭、毫米波雷達(dá)、激光雷達(dá)等設(shè)備一起收集車輛的周邊信息。激光雷達(dá)的加入能夠獲取更深度的空間信息,對(duì)于物體的位置、距離和大小感知更準(zhǔn)確,且由于激光雷達(dá)是自發(fā)光并不受環(huán)境光影響。不過,“多傳感器融合”方案也有自己的局限性,激光雷達(dá)容易受到雨雪霧天氣的影響。由于激光雷達(dá)本身數(shù)千美元的硬成本,加上“多傳感器融合”往往對(duì)計(jì)算芯片有更高的算力要求,因此成本沒有優(yōu)勢(shì)。目前,采用“多傳感器融合”方案實(shí)現(xiàn)自動(dòng)駕駛的企業(yè)主要有小鵬、蔚來、極狐等。
兩大派系在技術(shù)實(shí)現(xiàn)上,都是基于硬件來幫助汽車構(gòu)架自身周圍的3D信息,然后讓計(jì)算芯片提取關(guān)鍵信息來做出駕駛決定。未來,“純視覺”要解決的是光致盲和認(rèn)知錯(cuò)誤等問題,“多傳感器融合”本身的融合就是一大技術(shù)挑戰(zhàn),且算法本身還得優(yōu)化,也需要更低成本的激光雷達(dá)產(chǎn)品。目前來看,兩大技術(shù)路線都還有很多潛能值得挖掘。
當(dāng)然,高級(jí)別自動(dòng)駕駛尚未打開家用這個(gè)大市場(chǎng),路線之爭(zhēng)不僅是環(huán)境感知層面,還有單車智能和路車協(xié)同之間的爭(zhēng)議。但正如上文所述,元器件廠商對(duì)于自動(dòng)駕駛的支持都選擇了高靈活性和性能冗余等方式,給每一種實(shí)現(xiàn)方案都提供盡可能的支持。下面我們就著重為大家介紹幾款貿(mào)澤電子網(wǎng)站上在售的可應(yīng)用于自動(dòng)駕駛的元器件產(chǎn)品,幫助大家完成各種不同的自動(dòng)駕駛實(shí)現(xiàn)方案。
無論是傾向于怎樣的技術(shù)流派,對(duì)于實(shí)現(xiàn)自動(dòng)駕駛而言,攝像頭都是必要的,它們充當(dāng)著汽車的“眼睛”。那么,我們第一款要推薦的方案就是可應(yīng)用于下一代ADAS開發(fā)的FPGA評(píng)估套件——UltraScale+MPSoC ZCU102開發(fā)工具,它在視覺處理上非常出色,來自制造商AMD Xilinx,貿(mào)澤電子網(wǎng)站上的制造商編號(hào)為EK-U1-ZCU102-G-J。
圖2:MPSoC ZCU102評(píng)估套件
(圖源:AMD Xilinx)
MPSoC ZCU102開發(fā)工具采用Zynq UltraScale+ MPSoC器件,作為系統(tǒng)核心,該器件在核心配置、工藝架構(gòu)、器件尺寸、系統(tǒng)功耗、軟件支持和圖形處理等方面具有行業(yè)領(lǐng)先的產(chǎn)品特性。
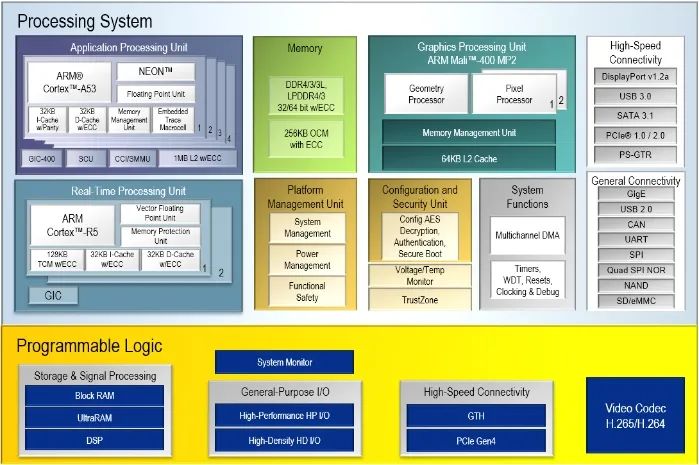
圖3:Zynq UltraScale+ MPSoC器件系統(tǒng)框圖
(圖源:AMD Xilinx)
通過上方的系統(tǒng)框圖能夠看到,Zynq UltraScale+ MPSoC器件基于四核ARMCortex-A53和雙核Cortex-R5實(shí)時(shí)處理器打造,并搭配靈活應(yīng)變的內(nèi)存層級(jí)。異構(gòu)處理的產(chǎn)品設(shè)計(jì)加上器件本身的可編程特性,在提供更好性能的同時(shí),允許工程師朋友多角度優(yōu)化自己的應(yīng)用。
16nm FinFET配合超小型化封裝讓Zynq UltraScale+ MPSoC器件擁有無與倫比的計(jì)算密度,不受應(yīng)用條件限制,并提供更好的信號(hào)完整性。
支持AI/ML的深度學(xué)習(xí)處理單元以及Mali-400 MP2圖形處理單元的存在,讓Zynq UltraScale+ MPSoC器件可以勝任下一代ADAS系統(tǒng)對(duì)于視覺系統(tǒng)和相關(guān)算法的高要求,H.264/H.265視頻編解碼器則進(jìn)一步提升了這方面的性能。同時(shí),豐富的外設(shè)接口讓Zynq UltraScale+ MPSoC器件對(duì)支持“多傳感器融合”也是毫無壓力。
可以說,異構(gòu)、高性能、超小型、高算力的Zynq UltraScale+ MPSoC器件是一顆用于打造下一代ADAS應(yīng)用的理想器件,該器件所提供的64位處理器可擴(kuò)展性更是為方案設(shè)計(jì)帶來了無限可能。想要體現(xiàn)該器件非凡的魅力,MPSoC ZCU102評(píng)估套件無疑提供了出色的平臺(tái)。
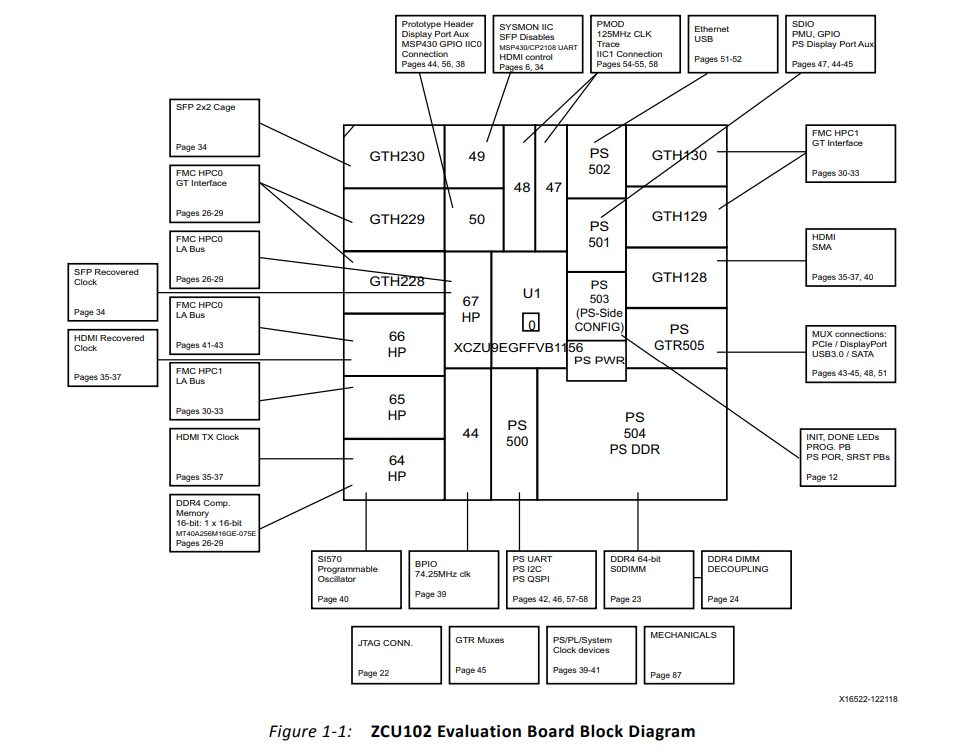
圖4:MPSoC ZCU102評(píng)估套件系統(tǒng)框圖
(圖源:AMD Xilinx)
MPSoC ZCU102評(píng)估套件針對(duì)采用Zynq Ultrascale+ MPSoC的應(yīng)用原型設(shè)計(jì)進(jìn)行了優(yōu)化,包括下一代ADAS。如上圖所示,該評(píng)估套件支持Zynq Ultrascale+ MPSoC的全部主要外設(shè)和接口,比如PCIe根端口Gen2x4、USB3、顯示端口和SATA等,支持各種方案的設(shè)計(jì)實(shí)現(xiàn)。
可用于ADAS原型設(shè)計(jì)的FPGA
在自動(dòng)駕駛推進(jìn)的過程中,我們看到,目前基本是廠商在主導(dǎo)技術(shù)路線之爭(zhēng)。而更進(jìn)一步來講,即便是相同的路線下,由于廠商對(duì)于各個(gè)ECU功能單元的界定不同,系統(tǒng)架構(gòu)和核心芯片的功能也會(huì)有差異。從元器件角度分析,由于每個(gè)公司對(duì)自動(dòng)駕駛的理解不同,產(chǎn)品設(shè)計(jì)理念也有很大差異。那么,如何才能高效找到更有市場(chǎng)競(jìng)爭(zhēng)力的設(shè)計(jì)方案呢?接下來這款產(chǎn)品能夠幫到你。
下面我們?yōu)榇蠹医榻B的是來自制造商AMD Xilinx的另一款解決方案——VersalAI Core系列VCK190評(píng)估套件,貿(mào)澤電子上,該產(chǎn)品的制造商編號(hào)為EK-VCK190-G-ED。
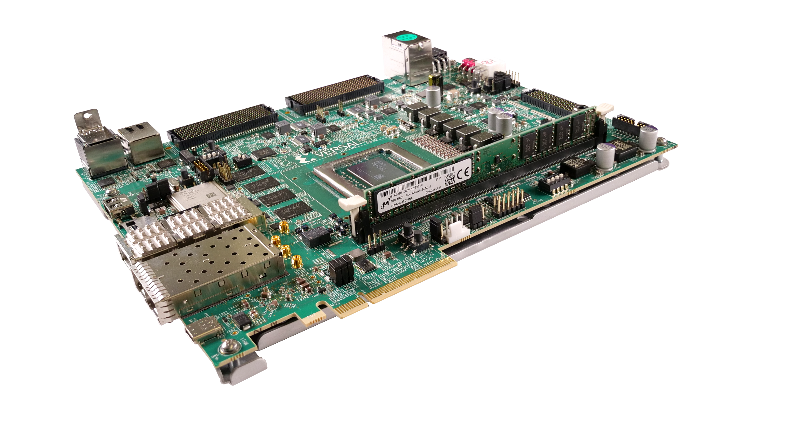
圖5:Versal AI Core系列VCK190評(píng)估套件
(圖源:AMD Xilinx)
根據(jù)Xilinx Wiki的介紹,VCK190評(píng)估套件是第一個(gè) VersalAI Core系列評(píng)估套件,可幫助設(shè)計(jì)者使用AI和DSP引擎開發(fā)解決方案。相較于服務(wù)器級(jí)CPU,這款評(píng)估套件的系統(tǒng)核心VC1902器件能夠提供超過100倍的計(jì)算力。
VCK190評(píng)估套件是一個(gè)“多面手”,工程師朋友既可以借助其廣泛的連接選項(xiàng)進(jìn)行快速應(yīng)用開發(fā),包括數(shù)據(jù)中心計(jì)算、5G無線電與波束成形(DFE)、無線測(cè)試設(shè)備等。同時(shí),也可以應(yīng)用于ADAS的原型開發(fā)。
針對(duì)ADAS的原型開發(fā),AMD Xilinx提供專門的目標(biāo)參考設(shè)計(jì),幫助實(shí)現(xiàn)汽車應(yīng)用的多傳感器視頻分析。在參考設(shè)計(jì)中,VCK190評(píng)估板上的圖像傳感器模塊能夠?qū)崟r(shí)接收信息傳遞并加速和攝像頭掛鉤的圖像傳感器信息,同時(shí)該評(píng)估板還支持其他汽車應(yīng)用中常見的AI/ML工作負(fù)載。
S32G2處理器幫助打造下一代網(wǎng)關(guān)
如上文所述,環(huán)境感知與精準(zhǔn)定位、路徑規(guī)劃、線控執(zhí)行并稱自動(dòng)駕駛四大核心技術(shù)。在具體實(shí)現(xiàn)時(shí),“純視覺”是多組ECU對(duì)應(yīng)多組攝像頭,提取有用信息之后匯總到計(jì)算芯片上做決策;“多傳感器融合”則是不同的傳感器對(duì)應(yīng)不同的ECU模塊單元,最終依然需要將提取之后的信息發(fā)送到計(jì)算芯片上進(jìn)行運(yùn)算。在車輛外部,車聯(lián)網(wǎng)的概念讓部分信息需要上傳到云端,實(shí)現(xiàn)汽車作為邊端的邊云通信。那么,在此過程中,網(wǎng)關(guān)配置就顯得尤為重要,用來幫助提高實(shí)時(shí)性處理和安全性。
接下來,我們要重點(diǎn)介紹的這款元器件便是可用于實(shí)現(xiàn)下一代汽車網(wǎng)關(guān)和架構(gòu)的S32G2汽車網(wǎng)絡(luò)微處理器,來自制造商NXP Semiconductors,大家可以通過搜索制造商編號(hào)S32G274AABK0VUCT在貿(mào)澤電子網(wǎng)站上精準(zhǔn)找到它。
S32G2微處理器是NXP在汽車網(wǎng)關(guān)設(shè)備系列中的升級(jí)產(chǎn)品,基于四核ArmCortex-A53應(yīng)用處理器打造,性能和網(wǎng)絡(luò)加速能力是該公司此前產(chǎn)品的10倍以上。能夠?qū)崿F(xiàn)如此大的性能跨越,得益于該器件先進(jìn)的設(shè)計(jì)理念。S32G2處理器帶可選的兩兩鎖步功能,用于處理高算力的應(yīng)用和服務(wù),其中3個(gè)Arm Cortex-M7全鎖步內(nèi)核,用于處理實(shí)時(shí)應(yīng)用。以太網(wǎng)數(shù)據(jù)包轉(zhuǎn)發(fā)引擎(PFE)、低延遲通信引擎(LLCE)以及硬件安全引擎(HSE)三大硬件加速器的存在,讓汽車網(wǎng)絡(luò)傳輸更快、更安全。
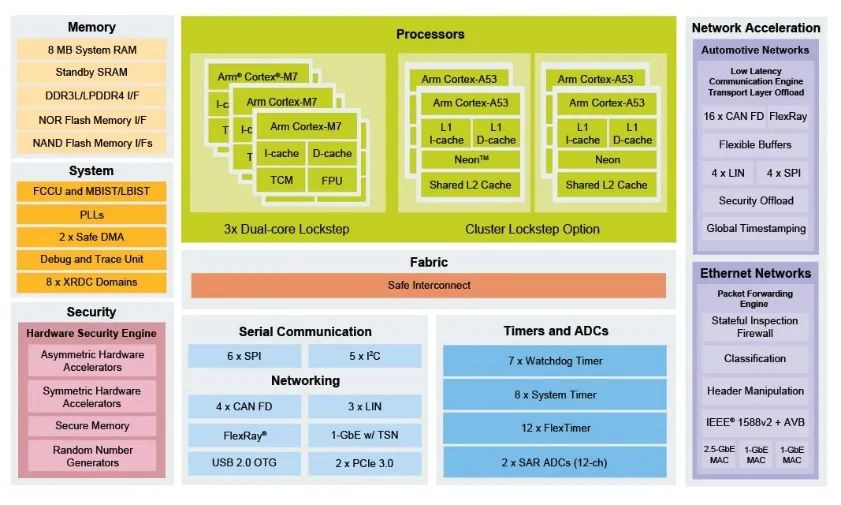
圖6:S32G2汽車網(wǎng)絡(luò)微處理器系統(tǒng)框圖
(圖源:NXP)
安全是S32G2處理器的一大產(chǎn)品特色,除了所提到的硬件加速器,還提供支持實(shí)現(xiàn)ASIL D功能安全的片上硬件模塊和軟件庫。在可選的高級(jí)軟件方案中,還提供可用于功能安全實(shí)現(xiàn)的S32安全軟件框架和用于Cortex-A53內(nèi)核的結(jié)構(gòu)內(nèi)核自測(cè)(SCST),帶來更高級(jí)的信息安全和功能安全體驗(yàn)。
總體而言,在域控制器、汽車網(wǎng)絡(luò)和安全處理器等方面,多功能的S32G2處理器都是絕佳選擇。
滿足多種汽車應(yīng)用的圖像傳感器
在技術(shù)路線的解讀中我們看到,無論走怎樣的發(fā)展路線,攝像頭都是自動(dòng)駕駛系統(tǒng)中必須要有的一部分,統(tǒng)稱為視覺系統(tǒng)。接下來,我們?yōu)榇蠹医榻B的這款器件是可用于ADAS、自動(dòng)駕駛、環(huán)視、倒車攝像頭、車艙內(nèi)監(jiān)測(cè)等諸多汽車應(yīng)用的圖像傳感器,來自制造商安森美(onsemi),貿(mào)澤電子上的制造商編號(hào)為ASX340AT2C00XPED0-DPBR2。
ASX340AT圖像傳感器是安森美圖像傳感器解決方案中的一個(gè)系列,主要面向汽車應(yīng)用市場(chǎng),適用于后視攝像頭、盲點(diǎn)監(jiān)控和環(huán)視等應(yīng)用。
ASX340AT系列是VGA格式的單芯片CMOS有源像素?cái)?shù)字圖像傳感器,具有優(yōu)質(zhì)圖像傳感器的內(nèi)在優(yōu)點(diǎn),比如低噪聲、低功耗和集成優(yōu)勢(shì)等,提供了多種攝像頭功能,包括自動(dòng)聚焦、自動(dòng)白平衡和自動(dòng)曝光。值得注意的是,ASX340AT系列是一款完整的片上攝像系統(tǒng),在片上集成了復(fù)雜的攝像頭功能,讓集成商能夠在無需額外處理芯片的情況下設(shè)計(jì)后視攝像頭系統(tǒng)。
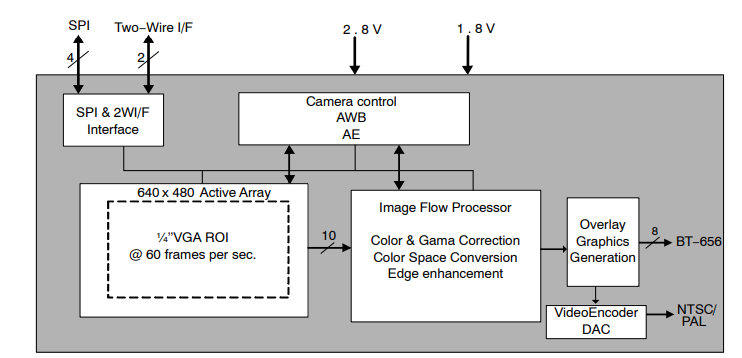
圖7:ASX340AT系列內(nèi)部框圖
(圖源:安森美)
除了ASX340AT系列,整個(gè)安森美圖像傳感器解決方案是全面的圖像檢測(cè)產(chǎn)品組合,支持VGA至超過50MP的分辨率以及CMOS和CCD技術(shù),可覆蓋汽車、工業(yè)、消費(fèi)領(lǐng)域的各種應(yīng)用。目前,該組合中新款5個(gè)系列圖像傳感器都在貿(mào)澤電子分銷,幫助工程師朋友實(shí)現(xiàn)前沿應(yīng)用創(chuàng)新。
路線之爭(zhēng)持續(xù),但目標(biāo)只有一個(gè)
無疑,在未來很長的一段時(shí)間內(nèi),關(guān)于如何實(shí)現(xiàn)自動(dòng)駕駛,依然會(huì)存在派系之爭(zhēng),無論是環(huán)境感知,還是整體方案的實(shí)現(xiàn)。不過,純視覺方案在未來將逐漸丟失先發(fā)優(yōu)勢(shì),且由于方案的局限性較為明顯,預(yù)計(jì)會(huì)有越來越多的廠商擁抱“多傳感器融合”方案,尤其是在更高階的自動(dòng)駕駛領(lǐng)域。當(dāng)然,無論如何實(shí)現(xiàn),最終目標(biāo)只有一個(gè)——讓汽車駕駛更安全。為實(shí)現(xiàn)這個(gè)目標(biāo),廠商需要用更好的硬件方案去適配更智能的軟件算法,而這正是貿(mào)澤電子能夠幫到廣大工程師朋友的地方,通過海量的原廠授權(quán)器件,讓大家高效、優(yōu)質(zhì)地實(shí)現(xiàn)自動(dòng)駕駛或輔助駕駛的硬件部分。
審核編輯 :李倩
-
傳感器
+關(guān)注
關(guān)注
2564文章
52749瀏覽量
765020 -
人工智能
+關(guān)注
關(guān)注
1805文章
48863瀏覽量
247637 -
自動(dòng)駕駛
+關(guān)注
關(guān)注
788文章
14254瀏覽量
170052
原文標(biāo)題:自動(dòng)駕駛路線之爭(zhēng):純視覺方案vs多傳感器融合方案
文章出處:【微信號(hào):貿(mào)澤電子,微信公眾號(hào):貿(mào)澤電子】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
AGV機(jī)器人如何實(shí)現(xiàn)毫秒級(jí)避障?深度解析多傳感器融合的核心技術(shù)

融合視覺傳感器廠商銳思智芯完成B輪融資
康謀應(yīng)用 | 基于多傳感器融合的海洋數(shù)據(jù)采集系統(tǒng)

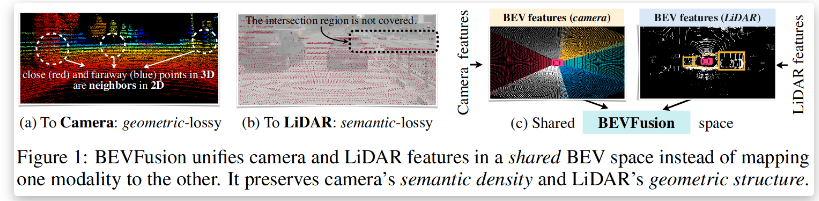
BEVFusion —面向自動(dòng)駕駛的多任務(wù)多傳感器高效融合框架技術(shù)詳解
淺談VS系列電壓傳感器
視美泰EVS事件融合相機(jī)新品“靈光一號(hào)”正式發(fā)布,開啟視覺新紀(jì)元

如何利用傳感器融合改進(jìn)工業(yè) 4.0 生產(chǎn)的流程和物流
從2D走向3D的視覺傳感器
雨量水位數(shù)據(jù)采集終端機(jī)RTU:多傳感器融合,水文監(jiān)測(cè)數(shù)據(jù)遠(yuǎn)程查看
多傳感器融合在自動(dòng)駕駛中的應(yīng)用趨勢(shì)探究

ZC1202速度傳感器溫度傳感器視覺傳感器加速度傳感器的作用
精密制造的革新:光譜共焦傳感器與工業(yè)視覺相機(jī)的融合
VS高精度電壓傳感器
計(jì)算機(jī)視覺中的圖像融合






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論