 介紹一款仿真器v2e
介紹一款仿真器v2e
事件相機仿真器模擬事件相機,生成事件數據供不同任務使用。本文簡介一款仿真器v2e。
Before v2e
在v2e出現之前,也出現過不少仿真器,從uzh的repo上可以找到
比較出名的一個是2017年的Event Camera Dataset附帶的仿真器,其根據最基本的事件生成模型進行仿真。
另一個是ESIM,相對于之前的仿真能力強大,仿真技術上的一項改進是將均勻采樣改變了自適應采樣,使光強變化更快的時候時間采樣率更高。見下圖右。
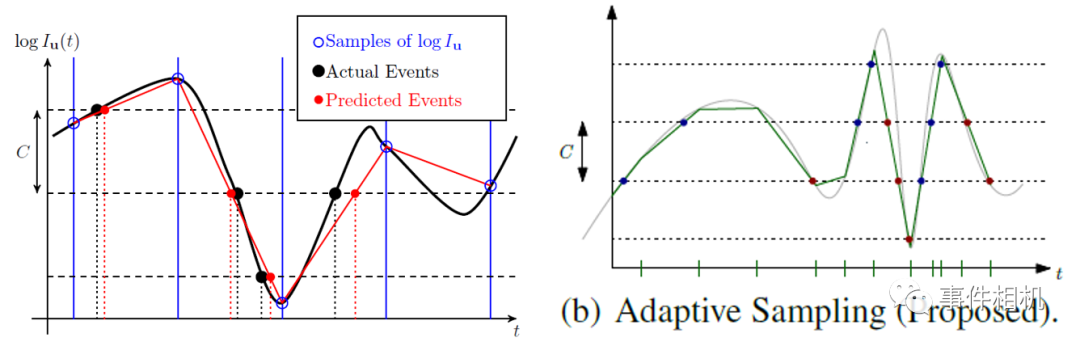
左圖:[1]的采樣原理;[2]ESIM的自適應采樣
同時,ESIM由于可以自行設置圖片或3D場景進行自定義的相機運動,可以獲取包括普通圖像、深度圖等信息在內的數據,廣泛的應用于SLAM、光流估計等任務。可以在ROS運行,使用較為方便。
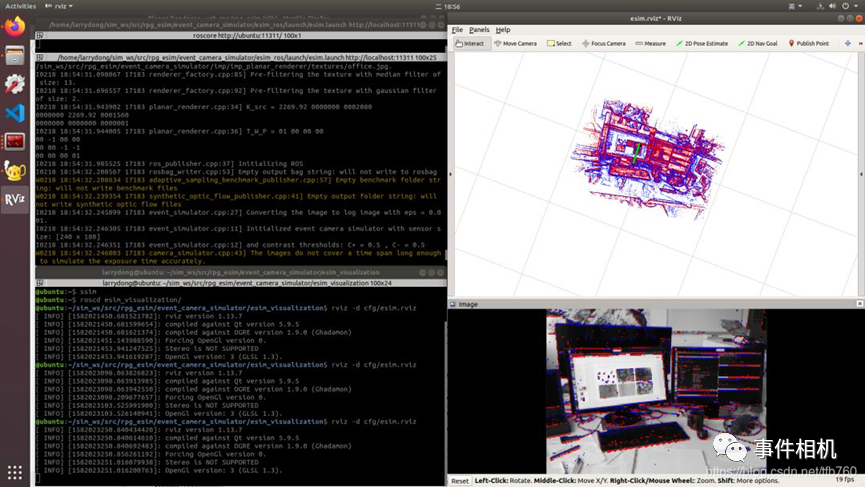
圖:ESIM配置后的和運行結果
About v2e
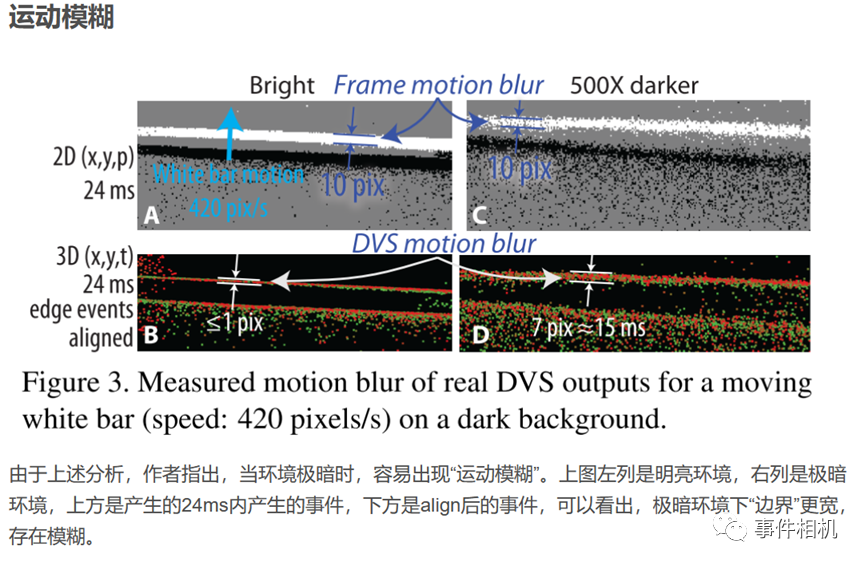
最后出現了本文的重點v2e[3]。在ESIM和vid2e中,生成機制是事件生成模型,考慮了噪聲和對比度閾值的影響,但與實際具有較大差距。v2e相比于前者,增加了更多的功能:暗光仿真、運動模糊、時間延遲等。(以下內容來自本人之前的博客,直接進行了搬運。博客連接點擊文末“獲取原文”)
v2e的安裝與使用(windows)
v2e的完整安裝可參考github的repo
本人在windows11 RTX3050筆記本上進行了安裝測試,進行整理如下:
1. 安裝環境
首先需要安裝v2e的運行環境,推薦采用conda安裝python3.9的虛擬環境。
之后官方說需要有GPU和CUDA加速,我不清楚沒有GPU是否可以,但我覺得哪怕可以仿真也會非常慢,不能忍受,所以還是需要有GPU;
最后安裝v2e依賴項:下載v2e后采用pip進行安裝依賴項。
2. 數據準備
v2e采用SuperSloMo網絡首先對原始視頻進行慢放,所以需要下載SuperSloMo的模型,并創建一個input路徑將模型放在input路徑下備用;
之后需要放待仿真的數據,v2e可以對視頻進行仿真,也可以對一組圖片進行仿真,只需要給定的是視頻文件路徑或圖片文件夾路徑即可自動選擇。
3. 運行與參數選擇
v2e的參數極其多,畢竟仿真的功能很多,包括DVS的參數(時間戳/像素分辨率、噪聲水平、對比度閾值、截止頻率等)、SuperSloMo的參數、輸入輸出參數(可以輸出視頻、文本、hdf5、aedat等多種格式)等,詳見v2e的repo。
運行時只需要在cmd進入虛擬環境后執行一行代碼即可。
v2e仿真DVS數據輸出視頻
針對上面的視頻,原視頻6s,分辨率設置為346x260,其他參數采用默認配置,仿真時間約3-5分鐘(RTX3050)。
4. 使用感受:
v2e的內容雖然非常復雜,但是使用起來較為簡單,只需要按照文檔把參數設置好就可,而且如果遇到錯誤在運行時給出的報錯信息也非常完整,基本可以根據報錯信息快速定位問題原因并解決。
后記
我配置過ESIM和v2e,感覺v2e雖然功能復雜,但使用起來更為方便,開發的較為完善,而ESIM配置過程中印象里踩了不少的坑。v2e的另一個好處就是可以windows下使用,對ubuntu和ros不熟悉的朋友更加友好。當然,最重要的是,v2e的仿真更加科學、真實。所以如果有仿真需求的朋友,可以考慮直接用v2e。
審核編輯:劉清
-
仿真器
+關注
關注
14文章
1034瀏覽量
85025 -
SLAM
+關注
關注
24文章
436瀏覽量
32352 -
ROS
+關注
關注
1文章
285瀏覽量
17588 -
eSIM
+關注
關注
3文章
247瀏覽量
27088
原文標題:事件相機仿真器v2e:原理與安裝使用
文章出處:【微信號:3D視覺工坊,微信公眾號:3D視覺工坊】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
ISOM8610 直流輸入、常開輸出、單通道隔離開關光仿真器數據手冊
ISOM8600 功能隔離、直流輸入、常開輸出、單通道隔離開關光仿真器數據手冊
概倫電子電路類型驅動SPICE仿真器NanoSpice X介紹

概倫電子千兆級高精度電路仿真器NanoSpice Giga介紹







 工商網監
工商網監
評論