") 如何實(shí)現(xiàn)大視場(chǎng)FoV更高角度分辨率的激光雷達(dá)呢
如何實(shí)現(xiàn)大視場(chǎng)FoV更高角度分辨率的激光雷達(dá)呢

基于各種工作原理的激光雷達(dá)(LiDAR)已經(jīng)在許多領(lǐng)域獲得應(yīng)用,例如機(jī)器人導(dǎo)航、自動(dòng)駕駛、無(wú)人機(jī)、地面勘測(cè)等。然而,激光收發(fā)器的數(shù)量限制了傳統(tǒng)多通道激光雷達(dá)系統(tǒng)的垂直角度分辨率,并使其成本高昂。而MEMS微鏡的興起,能夠?yàn)榈统杀尽⒏呓嵌确直媛实募す饫走_(dá)系統(tǒng)提供非常有前景的解決方案。
據(jù)麥姆斯咨詢報(bào)道,香港城市大學(xué)機(jī)械工程學(xué)院的研究人員通過(guò)結(jié)合機(jī)械旋轉(zhuǎn)式激光雷達(dá)系統(tǒng)和MEMS微鏡各自的優(yōu)勢(shì),以更合理的系統(tǒng)成本實(shí)現(xiàn)了大視場(chǎng)(FoV)、更高角度分辨率的激光雷達(dá)解決方案。研究人員將MEMS微鏡集成在自行設(shè)計(jì)的獨(dú)立收發(fā)器模塊中,并與360°旋轉(zhuǎn)平臺(tái)集成,以實(shí)現(xiàn)全景掃描。
與基于多通道的激光雷達(dá)系統(tǒng)相比,該系統(tǒng)不受激光源和探測(cè)器數(shù)量的限制,能夠?qū)崿F(xiàn)0.07°x 0.027°(水平x垂直)的角度分辨率以及360°x 8.6°(水平x垂直)的視場(chǎng)。該研究成果已經(jīng)以“Development of the high angular resolution 360° LiDAR based on scanning MEMS mirror”為題發(fā)表于Scientific Reports期刊。
采用上述系統(tǒng)配置,能夠以合理的價(jià)格(1700美元)實(shí)現(xiàn)360°視場(chǎng)的激光雷達(dá)系統(tǒng)。最后,研究人員還開發(fā)了一款數(shù)據(jù)處理程序,可以將掃描數(shù)據(jù)轉(zhuǎn)換為3D點(diǎn)云圖像,生成的圖像驗(yàn)證了這款基于MEMS微鏡的激光雷達(dá)系統(tǒng)的完整功能。
設(shè)計(jì)和原理
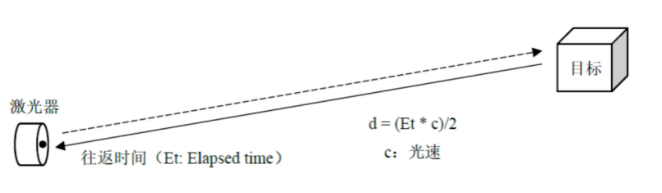
脈沖飛行時(shí)間(ToF)激光雷達(dá)系統(tǒng)的基本結(jié)構(gòu)如下圖所示。該系統(tǒng)由具有準(zhǔn)直功能的905 nm激光模塊(OSRAM SPLPL90)產(chǎn)生短激光脈沖。激光脈沖通過(guò)MEMS微鏡的單軸反射實(shí)現(xiàn)垂直方向掃描,然后通過(guò)360°旋轉(zhuǎn)平臺(tái)實(shí)現(xiàn)全景掃描。再由探測(cè)器檢測(cè)來(lái)自環(huán)境物體的反射脈沖。激光脈沖的飛行時(shí)間(借助快速運(yùn)行的計(jì)數(shù)器測(cè)量)與環(huán)境物體和傳感器之間的距離直接相關(guān),從而通過(guò)數(shù)據(jù)處理可以實(shí)現(xiàn)周圍環(huán)境的3D感知。
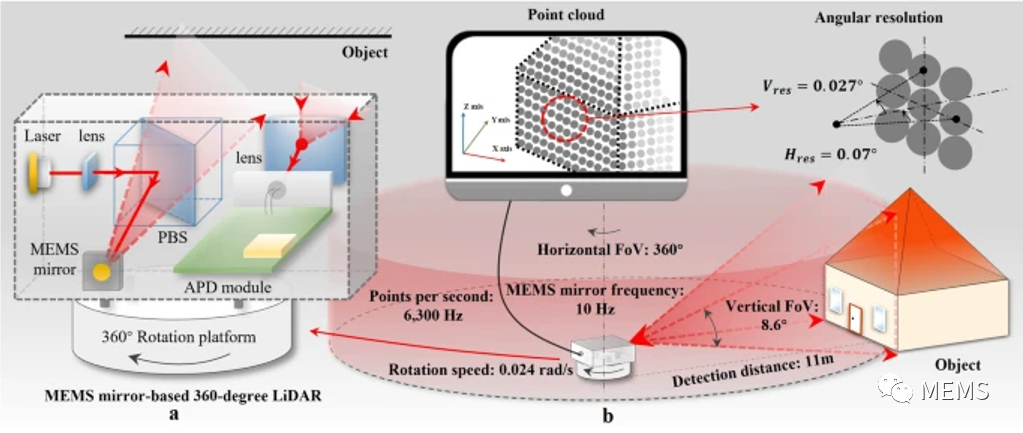
基于MEMS微鏡的360°激光雷達(dá)系統(tǒng):(a)激光雷達(dá)系統(tǒng)示意圖,(b)激光雷達(dá)的工作場(chǎng)景和參數(shù)。
激光雷達(dá)系統(tǒng)的角度分辨率表示傳感器可以分辨的兩點(diǎn)之間的最小角度或線性間隔。換句話說(shuō),它可以被視為單位面積的單位脈沖數(shù)。因此,更高分辨率的激光雷達(dá)可以創(chuàng)建更密集的點(diǎn)云圖。
基于MEMS微鏡的360°激光雷達(dá)系統(tǒng)
激光雷達(dá)系統(tǒng)應(yīng)用通常要求角度分辨率
在這項(xiàng)研究中,研究人員使用了機(jī)械角度為5°的MEMS微鏡(Mirrorcle S45868),可受益于點(diǎn)對(duì)點(diǎn)或準(zhǔn)靜態(tài)光束轉(zhuǎn)向。這意味著任何穩(wěn)態(tài)模擬驅(qū)動(dòng)電壓都可以導(dǎo)致MEMS微鏡的特定穩(wěn)態(tài)模擬旋轉(zhuǎn)角度,從而實(shí)現(xiàn)特定的光束方向。在DC(0 Hz)附近,注意到驅(qū)動(dòng)電壓和產(chǎn)生角度的一一對(duì)應(yīng)關(guān)系:它具有高度可重復(fù)性,不會(huì)隨時(shí)間發(fā)生可測(cè)量的退化。此外,通過(guò)增加變壓器和杠桿結(jié)構(gòu),驅(qū)動(dòng)范圍可以擴(kuò)大。它還具有優(yōu)異的抗機(jī)械沖擊和振動(dòng)性能,功耗小于1 mW,并為標(biāo)準(zhǔn)的硅基量產(chǎn)工藝而設(shè)計(jì)。
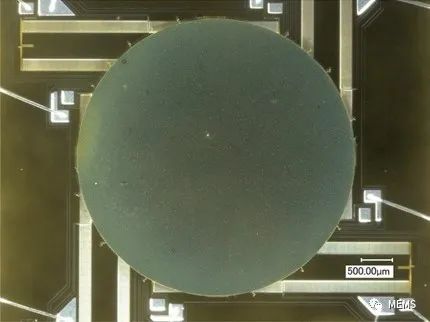
MEMS微鏡結(jié)構(gòu)
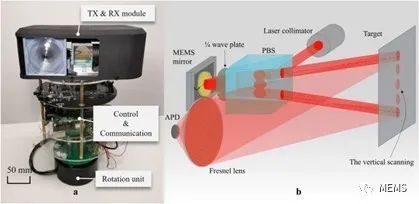
激光雷達(dá)系統(tǒng)設(shè)計(jì):(a)360°激光雷達(dá)系統(tǒng)的結(jié)構(gòu),(b)發(fā)射和接收模塊示意圖。
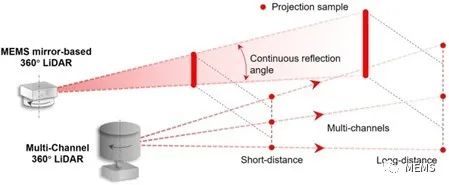
基于MEMS微鏡的激光雷達(dá)和多通道激光雷達(dá)的掃描機(jī)理對(duì)比
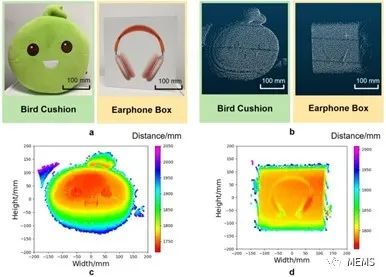
掃描試驗(yàn)結(jié)果:(a)掃描對(duì)象(抱枕和耳機(jī)盒)照片,(b)掃描點(diǎn)云圖,(c)抱枕深度圖,(d)耳機(jī)盒深度圖。
增大接收模塊視場(chǎng)的有效方法是采用具有更大有效面積的雪崩光電二極管(APD)。對(duì)于這項(xiàng)工作,研究人員選擇了有效區(qū)域直徑為1.5mm的APD,并采用了直徑為50 mm、焦距為10 mm的菲涅耳透鏡,以實(shí)現(xiàn)8.6°的垂直視場(chǎng)。
總結(jié)來(lái)說(shuō),研究人員展示了一種基于MEMS微鏡的具有高垂直掃描分辨率的360°激光雷達(dá)系統(tǒng)。該系統(tǒng)的水平掃描通過(guò)360°旋轉(zhuǎn)平臺(tái)實(shí)現(xiàn),而垂直掃描通過(guò)MEMS微鏡實(shí)現(xiàn)。基于水平和垂直掃描要求,通過(guò)設(shè)計(jì)激光發(fā)射器和APD接收器的光路,并開發(fā)控制和通信電路,實(shí)現(xiàn)了完整的激光雷達(dá)系統(tǒng)。
根據(jù)實(shí)驗(yàn)結(jié)果,該系統(tǒng)在視場(chǎng)(水平方向360°,垂直方向8.6°)和角度分辨率(水平方向0.07°,豎直方向0.027°)方面取得了良好的性能。和市售Velodyne HDL-64激光雷達(dá)傳感器相比,該系統(tǒng)的垂直角度分辨率提高了13.8倍。該特性可進(jìn)一步實(shí)現(xiàn)高質(zhì)量全景掃描,能夠?yàn)樽詣?dòng)駕駛、機(jī)器人導(dǎo)航、室內(nèi)測(cè)量等應(yīng)用提供更經(jīng)濟(jì)的解決方案。
審核編輯:劉清
-
mems
+關(guān)注
關(guān)注
129文章
4140瀏覽量
194062 -
探測(cè)器
+關(guān)注
關(guān)注
14文章
2701瀏覽量
74320 -
激光雷達(dá)
+關(guān)注
關(guān)注
971文章
4231瀏覽量
192714 -
激光收發(fā)器
+關(guān)注
關(guān)注
0文章
6瀏覽量
7853
原文標(biāo)題:結(jié)合MEMS微鏡和機(jī)械旋轉(zhuǎn)平臺(tái),實(shí)現(xiàn)高角度分辨率360°激光雷達(dá)
文章出處:【微信號(hào):MEMSensor,微信公眾號(hào):MEMS】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
全固態(tài)激光雷達(dá)為什么遲遲未來(lái)?其技術(shù)難點(diǎn)是什么?
FMCW激光雷達(dá),加速落地工業(yè)場(chǎng)景
SPAD席卷車載激光雷達(dá)市場(chǎng)
激光雷達(dá)(LiDAR)技術(shù)方案與工作原理全解析

自動(dòng)駕駛激光雷達(dá):原理、類型與應(yīng)用梳理

激光雷達(dá)進(jìn)化史:從機(jī)械式到全固態(tài)
激光雷達(dá)VS高分辨率感知雷達(dá):為更安全、更智能的汽車選擇合適的傳感器
激光雷達(dá)技術(shù)的基于深度學(xué)習(xí)的進(jìn)步
激光雷達(dá)在地形測(cè)繪中的作用
激光雷達(dá)與其他傳感器的比較
物聯(lián)網(wǎng)系統(tǒng)中的自動(dòng)駕駛的“眼睛”_純固態(tài)激光雷達(dá)






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論