") 分享四種4D毫米波雷達(dá)解決方案
分享四種4D毫米波雷達(dá)解決方案
毫米波雷達(dá)最大的“缺陷”是分辨率不高,無法辨識行人和對周圍障礙物進(jìn)行精準(zhǔn)的建模,而分辨率智能雷達(dá)傳感器對于實(shí)現(xiàn)高級自動駕駛是未來的發(fā)展趨勢。為了給雷達(dá)“開眼”,各家企業(yè)各顯神通,采用不同的技術(shù)進(jìn)行了大膽的創(chuàng)新,為了解決傳統(tǒng)毫米波雷達(dá)角分辨率低、點(diǎn)云密度低的問題,當(dāng)下出現(xiàn)了四種4D毫米波雷達(dá)解決方案:
1、基于傳統(tǒng)CMOS雷達(dá)芯片,提供軟件虛擬雷達(dá)孔徑,強(qiáng)調(diào)“軟件定義的雷達(dá)”,主要廠家有傲酷、Mobileye等;
軟件虛擬雷達(dá)孔徑,其核心在于通過軟件模擬,增大毫米波雷達(dá)的孔徑以提升角分辨率。角分辨率即為雷達(dá)的指向精度。比如雷達(dá)指向精度0.01弧度(換算成角度就是0.6度),那么自動駕駛車輛可以在100米的距離獲得1米的分辨率。在雷達(dá)中,角分辨率的高低與波長與孔徑大小有關(guān)。即波長越長,角分辨率越低,孔徑越大,分辨率越高。
傳統(tǒng)毫米波雷達(dá)大多為24GHz,波長較長且孔徑小,其特性注定角分辨率低。倘若擴(kuò)展天線的尺寸或者增加天線的數(shù)量,可以提高雷達(dá)性能,但也會顯著增加成本、尺寸和功耗。而4D毫米波雷達(dá)可通過虛擬孔徑成像軟件算法和天線設(shè)計,模擬數(shù)倍、甚至數(shù)十倍天線以提升角分辨率。
美國的4D成像雷達(dá)公司傲酷推出的商用4D成像雷達(dá)EAGLE,其搭載虛擬孔徑成像軟件可動態(tài)發(fā)送相位調(diào)制的自適應(yīng)波形。該波形可跟隨環(huán)境實(shí)時變化,并隨時間編碼數(shù)據(jù),從而可雷達(dá)硬件的角分辨率最高提升達(dá)100倍。最終實(shí)現(xiàn)120°水平/30°縱向的寬視場中提供0.5°水平x1°縱向的角分辨率。
2、將多發(fā)多收天線集成在一顆芯片,直接提供成像雷達(dá)芯片,比如Arbe、Vayyar等;
車用毫米波雷達(dá)芯片是整個系統(tǒng)的核心,它包括多種功能電路,如低噪聲放大器(LNA)、功率放大器(PA)、混頻器、壓控振蕩器(VCO)、鎖相環(huán)頻率綜合器(PLL)、本振鏈路(LO)、移相器、倍頻器、分頻器、可編程增益放大器(PGA)、濾波器、甚至收發(fā)天線等,需要具備射頻損耗小、噪聲低、頻帶寬、動態(tài)范圍大、輸出功率大、功率附加效率高、抗電磁輻射能力強(qiáng)等特點(diǎn)。
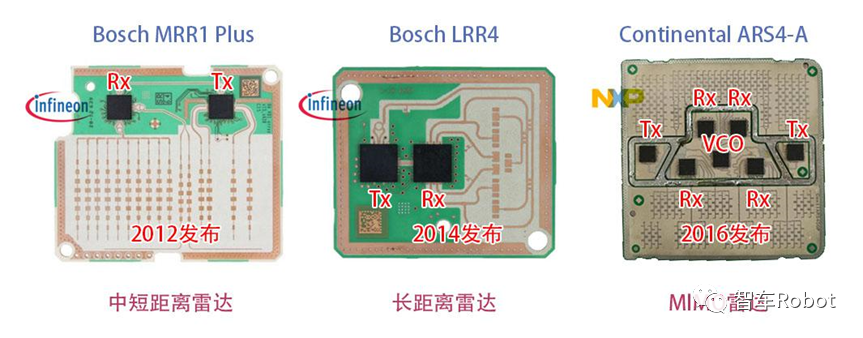
當(dāng)今量產(chǎn)的76GHz~81GHz毫米波雷達(dá)芯片技術(shù)大都采用SiGe制程,接收通道、發(fā)射通道和本振通道分開實(shí)現(xiàn)。目前正在向成本更低、集成度更高的硅基CMOS技術(shù)演進(jìn),從65nm、40nm逐步向28nm、16nm工藝演進(jìn),同時集成度進(jìn)一步提高,實(shí)現(xiàn)射頻前端、ADC、MCU和存儲器單片全集成,達(dá)到成本低、封裝小、重量輕、功耗低的設(shè)計要求。
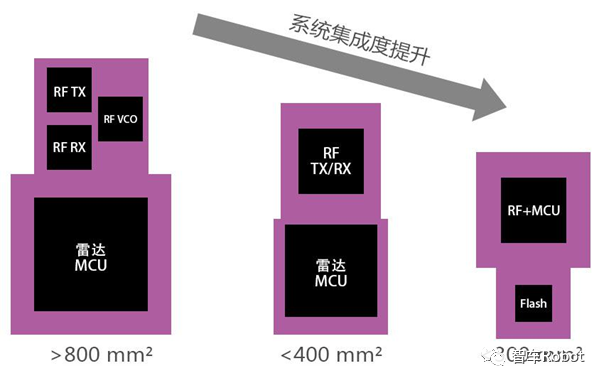
車用毫米波雷達(dá)核心芯片技術(shù)發(fā)展趨勢 毫米波雷達(dá)根據(jù)點(diǎn)云密度由低至高可分為24GHz、77GHz、79GHz三種,其中24GHz為市場主流,77GHz及79GHz初入量產(chǎn)階段。
點(diǎn)云密度低意味著自動駕駛車輛在行駛中無法對周圍行人、車輛、樁桶點(diǎn)云成像,使得僅搭載毫米波雷達(dá)的車輛無法在復(fù)雜路段行駛。而目前4D毫米波雷達(dá)普遍為77GHz及以上頻段,車輛可在行駛中達(dá)到類似激光點(diǎn)云的成像方式。
該技術(shù)的代表公司為以色列初創(chuàng)公司Vayyar,其推出的單片成像雷達(dá)可通過獲取動態(tài)點(diǎn)云構(gòu)建實(shí)時、高分辨率的四維可視化機(jī)艙和汽車外部環(huán)境。
3、將77GHz/79GHz的標(biāo)準(zhǔn)雷達(dá)芯片多芯片級聯(lián),以增加天線數(shù)量,比如大陸、博世、ZF等一眾公司;
毫米波雷達(dá)天線的主流方案是微帶陣列,利用較小的高頻印刷電路板(PCB)空間產(chǎn)生足夠的天線輻射強(qiáng)度,并實(shí)現(xiàn)與芯片的互連。
車用毫米波雷達(dá)天線與模塊的主要技術(shù)路線 基于多芯片級聯(lián)的79GHz MIMO毫米波成像雷達(dá)是未來產(chǎn)業(yè)化方向。采用多芯片級聯(lián)和微型化PCB板載天線陣列,加上雷達(dá)信號處理,可以實(shí)現(xiàn)面向高精度多維成像的79GHz MIMO虛擬陣列雷達(dá),將識別精度進(jìn)一步提升到微米級別,支持距離、速度、角度、高度測量和多視角可調(diào)多工作模式,實(shí)現(xiàn)全天候下的多維毫米波成像。
芯片級聯(lián)可分為二級聯(lián)、四級聯(lián)、八級聯(lián)三種方法。通過將2個/4個/8個的3發(fā)4收的芯片聯(lián)為一體,組成6發(fā)8收/12發(fā)16收/24發(fā)/32收芯片。然而,此種傳統(tǒng)提高角分辨率的方式,只是簡單堆砌更多芯片、更多天線。例如提高角分辨率到1度角,必須通過四個芯片級聯(lián)、增加天線。但雷達(dá)硬件受成本、尺寸、功耗的限制較大,較少公司采用此方法提高角分辨率。
4、通過超材料研發(fā)新型雷達(dá)架構(gòu),代表廠家有Metawave等。
通過在超材料表面上嵌入顯微結(jié)構(gòu),該結(jié)構(gòu)可結(jié)合電磁波傳播技術(shù),以此創(chuàng)建出比傳統(tǒng)電路要小很多的電路。此類技術(shù)為代表的公司是Metawave,其SPEKTRA雷達(dá)通過模擬波束并不斷轉(zhuǎn)向波束,可對350米以上的車輛和200米以上的行人進(jìn)行檢測和分類。
Metawave采用的方法是把電磁波束緊緊地聚攏起來,讓其能量集中在一處,如圖。而要實(shí)現(xiàn)這樣的效果,在數(shù)字空間(Digital Space)是辦不到的,只有在模擬空間(Analog Space)里才能做到。實(shí)際上,WARLORD可以說是一款模擬波束雷達(dá)產(chǎn)品(Analog Beam Forming Radar)。
WARLORD的技術(shù)特性:
其一,采用可操控的天線。Metawave采用的是單天線,而非天線陣列,同時接收也是單線的。這種天線由復(fù)合超材料結(jié)構(gòu)而成,每一個超材料單元(Unit Cell)都有活躍組件能夠參與波束成形,還能調(diào)整波束角度。這相較于如今大部分雷達(dá)用的多天線結(jié)構(gòu)有很大的優(yōu)勢。
復(fù)雜的波束掃描
其二,信號收發(fā)端進(jìn)行了整合。Metawave采用了英飛凌、NXP和TI等Tier2的芯片,并與他們進(jìn)行合作,將天線和芯片組進(jìn)行了整合。
其三,優(yōu)越的微控制技術(shù)。比如要控制天線探測前方的物體,追蹤其距離、角度、速度以及運(yùn)動的方式,同時還要判斷這些物體的類別,最后還要把這些經(jīng)過處理的信息傳送給(自動駕駛汽車)的傳感器融合單元。
5、4D毫米波雷達(dá)的技術(shù)優(yōu)勢
4D毫米波雷達(dá)的四種方案,針對傳統(tǒng)毫米波雷達(dá)缺陷逐個擊破,以此拿到進(jìn)入L3自動駕駛的門票 4D毫米波雷達(dá)在原有距離、方位、速度的基礎(chǔ)上增加了對目標(biāo)的高度維數(shù)據(jù)解析,能夠?qū)崿F(xiàn)距“3D+速度”四個維度的信息感知,可以有效地解析目標(biāo)的輪廓、類別、行為。
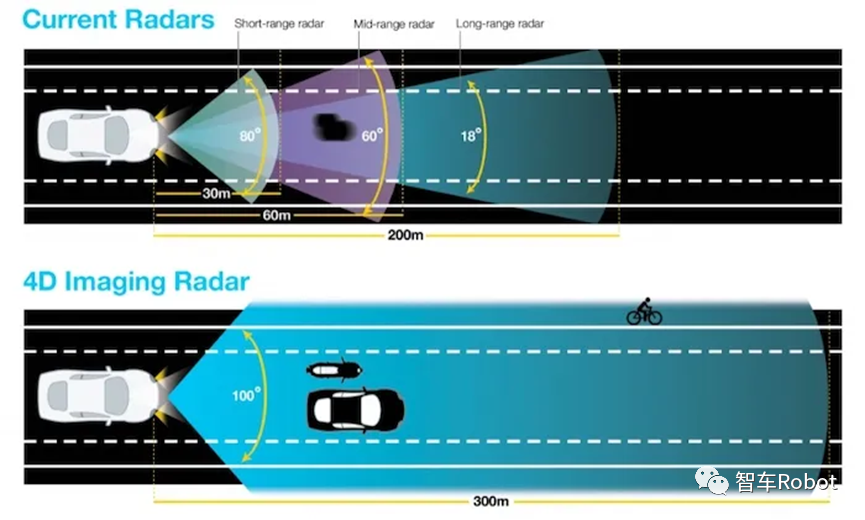
4D毫米波雷達(dá)對比 4D毫米波雷達(dá)系統(tǒng)可以適應(yīng)更多復(fù)雜路況,包括識別較小的物體,被遮擋的部分物體以及靜止物體和橫向移動障礙物的檢測。
從性能效果來說,4D成像毫米波雷達(dá)算是3D毫米波雷達(dá)的升級版,另一方面,從成本上看,4D成像毫米波雷達(dá)的成本也僅為激光雷達(dá)的10%-20%。
相比于傳統(tǒng)的3D毫米波雷達(dá),車載4D毫米波雷達(dá)在工作時,除了能夠解算出目標(biāo)的距離、速度、水平角信息,還能解算出目標(biāo)的俯仰角信息,進(jìn)而可以提供汽車周圍的環(huán)境信息,能夠避免窨井蓋、路肩、減速帶所產(chǎn)生的虛警現(xiàn)象。
除此之外,得益于能夠提供目標(biāo)的高度信息,捕捉到汽車周圍目標(biāo)的空間坐標(biāo)和速度信息,4D毫米波雷達(dá)還能夠提供更加真實(shí)的路徑規(guī)劃、可通行空間檢測功能。
目前4D成像毫米波雷達(dá)產(chǎn)品,主要面臨著兩個難題:
首先是目前對4D毫米波雷達(dá)的需求并不明確。原本毫米波雷達(dá)只輸出帶有距離、速度信息的目標(biāo),但4D成像毫米波雷達(dá)還額外提供了具有方位角信息的點(diǎn),企業(yè)究竟要利用這一特征達(dá)到何種感知目的,目前業(yè)內(nèi)還沒有明確的方案。
第二大難點(diǎn)則是現(xiàn)下業(yè)內(nèi)并沒有專門針對4D成像毫米波雷達(dá)的測試設(shè)備,行業(yè)的生態(tài)鏈并不成熟。廠商們只能利用傳統(tǒng)毫米波雷達(dá)的測試設(shè)備,來驗(yàn)證其4D成像毫米波雷達(dá)產(chǎn)品的性能。但是目標(biāo)模擬器這樣的傳統(tǒng)測試設(shè)備,其分辨率并不高,無法驗(yàn)證4D成像毫米波雷達(dá)的分辨率是否達(dá)到了1°或者零點(diǎn)幾度。如果產(chǎn)品的一些基礎(chǔ)性能出了問題,比如天線設(shè)計,沒有辦法在實(shí)驗(yàn)室里檢測出來,做不了前端測試,無法形成一個完整的研發(fā)閉環(huán)。”
但4D成像毫米波雷達(dá)趨勢已不可逆轉(zhuǎn)。中國的4D成像雷達(dá)市場將領(lǐng)跑全球,國內(nèi)市場L2+及以上新車搭載率有望在2025年突破50%。同時,4D成像雷達(dá)將從2023年初開始小規(guī)模前裝導(dǎo)入,預(yù)計到2023年,搭載量有機(jī)會突破百萬顆,到2025年占全部前向毫米波雷達(dá)的比重有望超過40%。
審核編輯:劉清
-
CMOS
+關(guān)注
關(guān)注
58文章
5996瀏覽量
238214 -
振蕩器
+關(guān)注
關(guān)注
28文章
3970瀏覽量
140497 -
混頻器
+關(guān)注
關(guān)注
10文章
844瀏覽量
46732 -
雷達(dá)傳感器
+關(guān)注
關(guān)注
3文章
294瀏覽量
34850 -
毫米波雷達(dá)
+關(guān)注
關(guān)注
107文章
1085瀏覽量
65200
原文標(biāo)題:4D毫米波雷達(dá)方案介紹
文章出處:【微信號:智能汽車電子與軟件,微信公眾號:智能汽車電子與軟件】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
多毫米波雷達(dá)的實(shí)車連續(xù)測量應(yīng)用案例
黑芝麻智能視覺與4D毫米波雷達(dá)前融合算法介紹

8T8R、250M測距,國產(chǎn)4D毫米波雷達(dá)芯片新突破
毫米波雷達(dá)信號的傳輸特性
毫米波雷達(dá)與超聲波雷達(dá)的區(qū)別
毫米波雷達(dá)工作原理 毫米波雷達(dá)應(yīng)用領(lǐng)域
康謀技術(shù) | 高效環(huán)境感知:毫米波雷達(dá)數(shù)據(jù)采集、可視化及存儲方案

康謀技術(shù) | 毫米波雷達(dá)技術(shù)解析

什么是毫米波雷達(dá)?毫米波雷達(dá)模組選型






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論