 為什么電流檢測是協作式移動機器人的必備條件
為什么電流檢測是協作式移動機器人的必備條件
機器人在制造和倉儲設施中越來越普遍。工廠正在擴大移動機器人的使用,以幫助在沒有人工交互的情況下自主將物品從A點移動到B點,同時還擴大了協作機器人的使用,以實現更高效的工作并減少工人疲勞。電流檢測在移動機器人和協作機器人中起著至關重要的作用,有助于實現這些優勢。
移動機器人通常在主電源軌上使用 48 V 至 80 V 的鋰離子電池運行,并且可能會在主電源軌上遇到超過 150 A 的高浪涌電流。移動機器人上的輔助電源軌可以利用 3.3 V 至 80 V 之間的任何電壓為照明、電機、視覺系統、CPU、內存和其他相關子系統等外圍設備供電。次級電源軌上的電流水平通常要低得多,在數十安培的范圍內。
另一方面,協作機器人通常在24 V至60 V之間工作。系統內的電流水平(特別是電動機中的電流)通常為每個節點約20 A或更低。精確的電流測量在協作機器人中更為重要,因為高精度提供了嚴格的系統控制,以實現機器人的安全高效操作。
電流檢測在電機驅動相電流測量、電池管理系統和一般外設監控等用例的機器人系統中起著不可或缺的作用。
移動和協作機器人中的電機驅動
在電機控制應用中,電流檢測IC現在具有一個前端,該前端利用了一種稱為增強型脈寬調制(PWM)抑制的技術。該技術最大限度地減少了由開關共模電壓信號引起的輸出誤差,這在在線相電流測量中非常常見。如 圖1,它改善了電氣特性,如失調、增益誤差和溫度漂移,從而實現了增強系統性能和超精確測量等優勢。
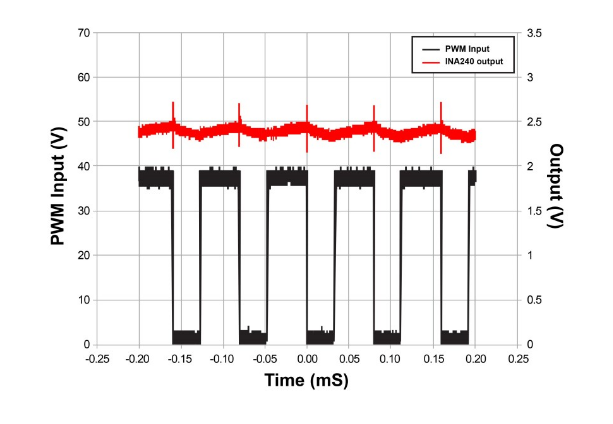
圖1 PWM 抑制改善了失調、增益誤差和溫度漂移等電氣特性。源: 德州儀器
更仔細地觀察電機驅動器, 圖2 顯示了移動或協作機器人中三相電機系統中電流檢測IC的五個潛在位置。從左上角開始是一個高側直流母線,它與相位無關,可監控整個電機系統中的電流負載以及短路情況。隨后的電流檢測實現在每個相位的高端,監控進入電機每個相位的電流。監控每個相位使系統能夠更好地檢測哪個相位可能運行不正確。對于高端測量,電流檢測IC通常具有最高的系統電壓電平。
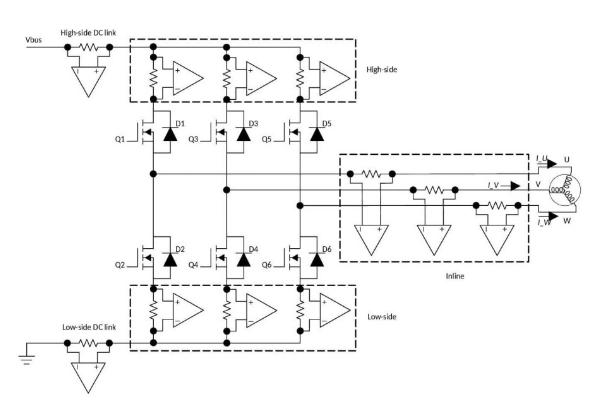
圖2 以下是機器人系統中常用的電機電流檢測方法的概要。來源:德州儀器
圖2的中心是在線電流監控,它支持閉環反饋系統。控制器部分現在可以根據相電流水平控制系統,從而提供更嚴格的控制能力。直列電機電流檢測的困難在于開關共模信號;然而,PWM抑制技術除了檢測高達110 V的高共模電壓外,還可以幫助減輕PWM信號可能產生的誤差,類似于高端測量。這些特性使得在系統中實現這些IC變得更加容易,并通過實現更嚴格的系統控制來提高整體效率。
圖2中的最后配置是低側相位和低側直流母線。低邊測量通常在較低的電壓電平下進行,因為IC靠近地電位;這些IC可以監視低側電流。低側監控可全面讀取系統中的電流測量值;它還在負載后提供較低級別的保護和控制。可以在電機系統中使用這些配置中的一種或多種。
移動和協作機器人中的負載點檢測
圖3 展示了移動機器人系統如何監控外圍設備,如照明、雷達、處理系統和其他相關子系統。通常,電源系統為次級電源軌和通道提供直流電源。電源被引導到 DC/DC 轉換器,然后輸送到負載開關,負載開關連接和斷開負載與電源的連接,以在不需要外圍設備時節省能源并提高效率。
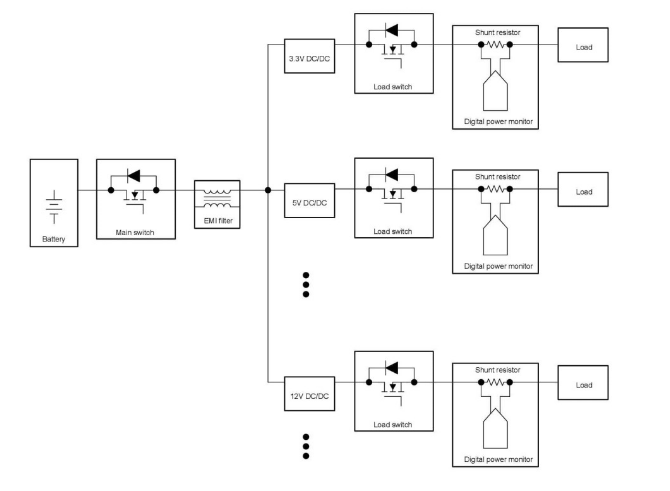
圖3 以下是機器人系統中使用的負載點電流檢測方法的廣泛視圖。來源:德州儀器
當開關使能時,電流檢測IC監控通過開關的電流和電壓,并通過I將電壓、電流、功率和其他重要信息傳輸回微控制器2C. 此數據有助于確保系統的運行狀況和峰值效率。您也可以在這里使用電流檢測IC,但在大多數情況下需要更多的硬件,例如模數轉換器(ADC)或微控制器上的通用輸入/輸出引腳。但是,在需要快速過流檢測的特定情況下,電流檢測IC具有1 μs比較器。
機器人安全趨勢的新興趨勢
國際標準化組織(ISO)3961-4規定了無人駕駛移動機器人及其倉庫機器人系統的安全要求,而ISO 15066規定了協作工業機器人系統及其工作環境的安全要求。ISO標準有所不同,因為移動機器人在倉庫或區域周圍移動的能力具有更大的自由度,這可能會導致機器人發生事故的可能性增加。
根據ISO標準,汽車電子委員會(AEC)-Q100 IC可以幫助確保最高的IC質量,并且這些IC生成的信息是可靠的。
在移動或協作機器人平臺中利用電流檢測可以提高安全性和效率,減少工人疲勞,并幫助監控系統運行狀況。實現電流檢測IC存在尺寸等挑戰,但小外形晶體管(SOT)-23或SC-70封裝有助于最大限度地減少尺寸限制。
使用電流檢測 IC 可以通過實現嚴格的控制和運行狀況監控來幫助設計人員增加增強的功能。電流檢測正在不斷擴展,隨著技術的不斷發展,電流檢測的使用將變得越來越重要,因為更多的電子設備將需要監控。
-
電流檢測
+關注
關注
14文章
510瀏覽量
41170 -
移動機器人
+關注
關注
2文章
771瀏覽量
33699 -
協作機器人
+關注
關注
2文章
498瀏覽量
30224
發布評論請先 登錄
相關推薦





 工商網監
工商網監
評論