 自動駕駛地圖研究:SD pro MAP快速上車,助力城市NOA輕地圖智駕方案
自動駕駛地圖研究:SD pro MAP快速上車,助力城市NOA輕地圖智駕方案
佐思汽研發布《2024年自動駕駛地圖行業研究報告》。
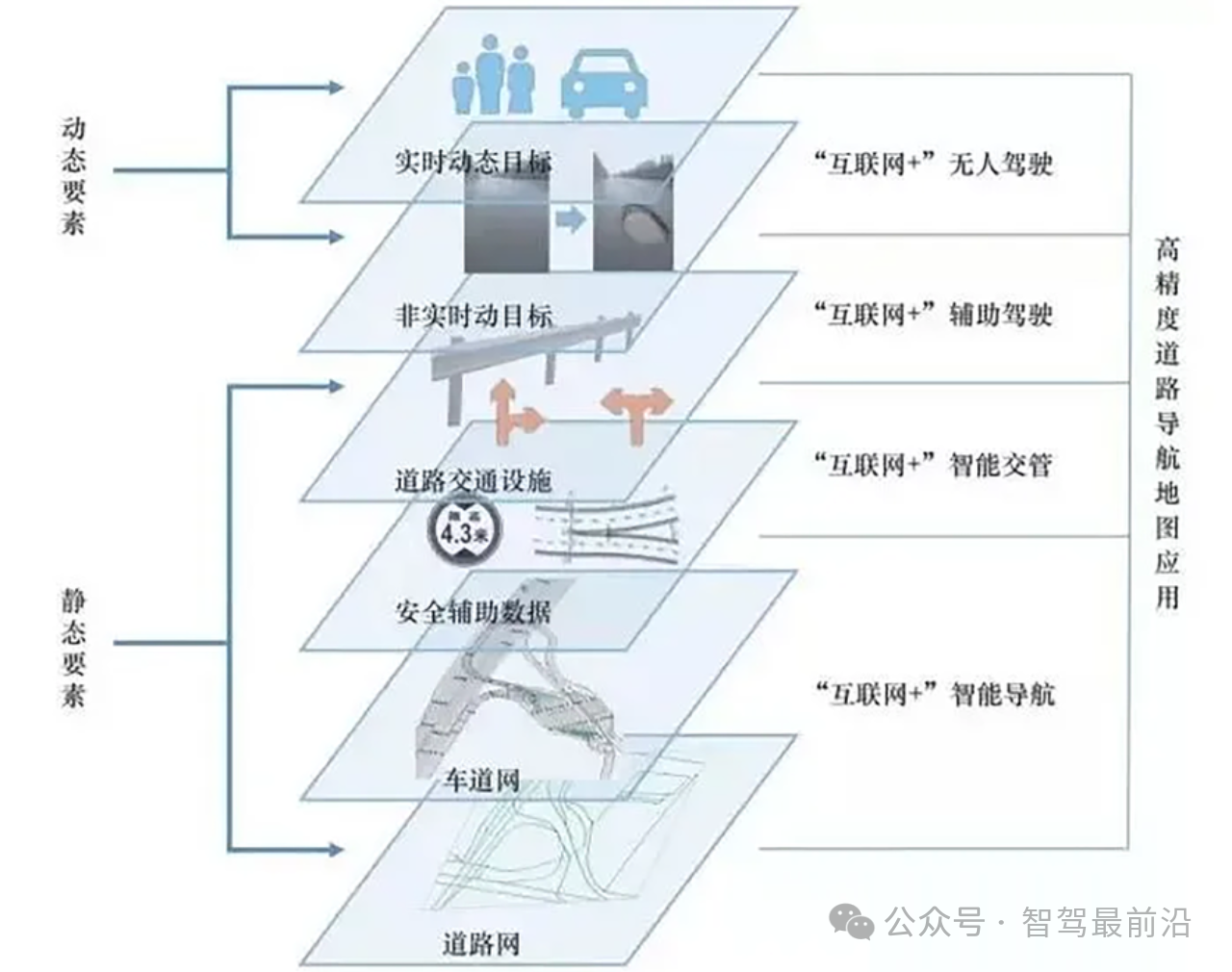
隨著高精度地圖資質監管收緊,地圖采集成本、更新頻率、覆蓋范圍等問題凸顯,以及城市NOA的快速發展,2023年“輕地圖”的智駕方案成為熱門話題,該方案降低了對離線高精度地圖的依賴,高精度地圖的發展遇到挑戰。 從自動駕駛的發展進程看,一段時間內將持續處于人機共駕階段,這個階段對地圖的需求并不一定是要高精度地圖,針對不同地圖互補特性整合的多源地圖可能更適合該階段的自動駕駛需求。
新一代自動駕駛地圖發展情況下,各方如何應對?
政府:收緊高精度地圖測繪甲級資質的同時,積極推進高輔地圖(高級輔助駕駛地圖)的審圖、乙級測繪資質等審查工作。
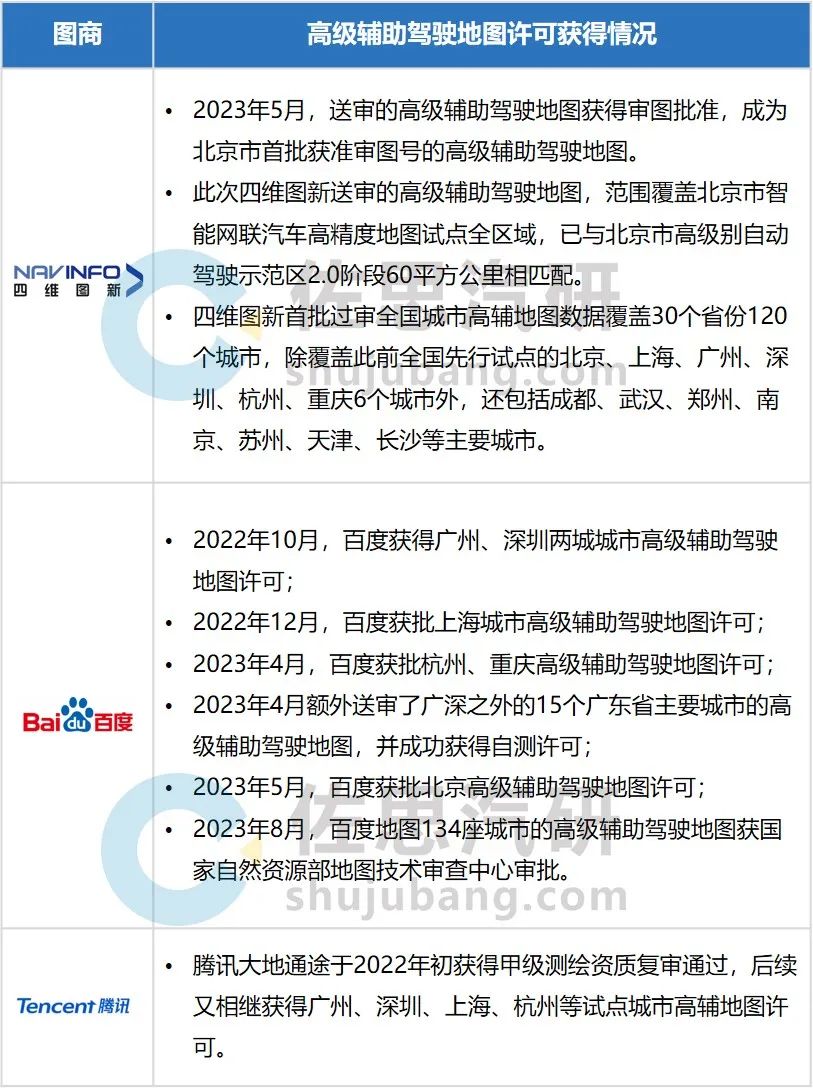
2023年6月國家自然資源部地圖技術審查中心公布了全國城市普通道路高級輔助駕駛地圖審圖工作的階段性進展,允許企業批量送審全國城市普通道路高級輔助駕駛地圖。目前,四維圖新過審全國城市高輔地圖數據覆蓋30個省份120個城市;百度地圖過審134座城市的高級輔助駕駛地圖。
主流圖商高輔地圖許可情況
來源:佐思汽研《2024年自動駕駛地圖行業研究報告》
主機廠:相關部門對導航電子地圖測繪甲級資質的收緊,打擊了主機廠布局地圖測繪甲級資質的積極性。目前一部分主機廠通過神經網絡大模型算法等實現實時建圖,削弱對離線高精度地圖的依賴,以特斯拉、理想、小鵬、華為ADS加持車型為代表;另一些主機廠則尋求穩健,通過申請乙級測繪資質或與圖商合資成立新公司等形式來獲取測繪資質,如廣汽與南京市測繪勘察研究院股份有限公司等合作方共同投資設立“廣東廣祺輿圖股權投資合伙企業(有限合伙)、蔚來下屬公司安徽蔚來智行科技有限公司申請互聯網地圖服務甲級資質等。
圖商:順應市場需求推出“輕地圖”方案,將SD數據、HD數據、LD數據等放到一張圖上,保證導航的連貫性。此外以騰訊為例,在推出“三合一”智駕地圖之后又進一步推出“智駕云圖”, 支持圖商、車企、自動駕駛公司等角色協同共建。
新勢力車廠率先開啟“輕地圖”方案
目前主機廠不依賴高精度地圖的方案,不是真正意義上的完全不用地圖,而是對高精度地圖的地圖元素做減法或者在導航地圖上做加法。
在“輕地圖”方案上布局比較積極的主要是新勢力車廠,原因之一是新勢力車廠城市NOA功能推進速度較快,而高精度地圖無法匹配相關需求。
部分主機廠的“輕地圖”方案
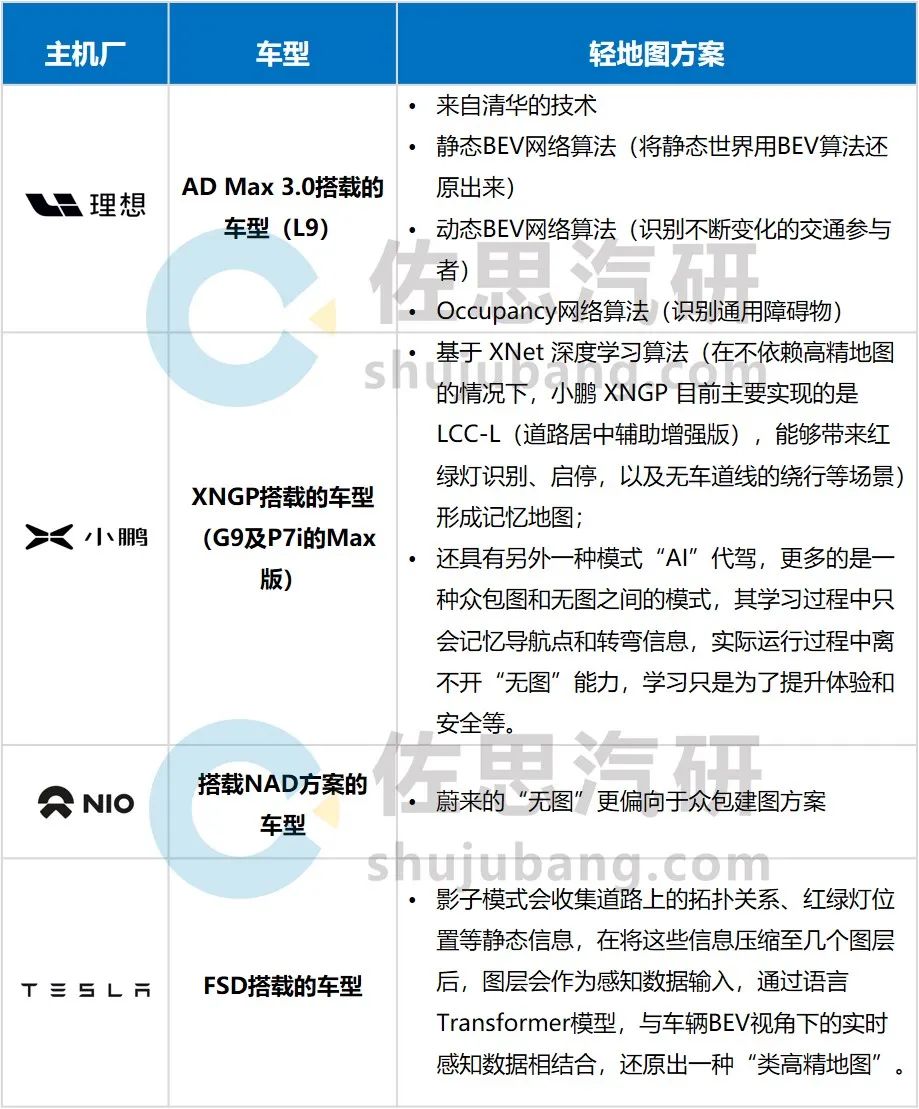
來源:佐思汽研《2024年自動駕駛地圖行業研究報告》
小鵬
2023年上半年開始基于SD地圖研發智駕方案,使用高精度地圖的NGP和不使用高精度地圖的NGP采用的是同一套技術棧,區別僅僅是把原先高精地圖的輸入,換成了導航地圖的輸入和實時感知對導航信息的理解。
小鵬不使用高精度地圖的方案相比使用高精度地圖的方案具有泛化速度快4~10倍,徹底解決數據鮮度,降低成本、普及智駕等優勢。
小鵬實現的“無離線高精度地圖”就是依靠XNet來實時構建“高精地圖”。
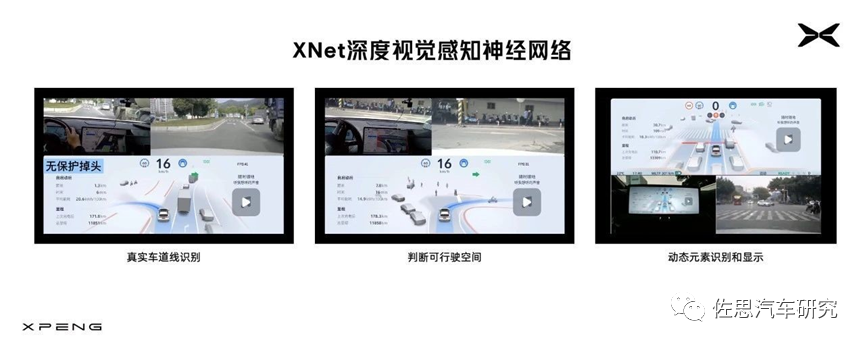
來源:小鵬
理想
理想在2023年開啟城市NOA,該方案不依賴高精度地圖,主要是構建路口的特征用于協助實時感知建圖,概括來說就是路段“無圖”,路口采用眾包建圖。
目前,理想在推進NPN方案,希望解決地圖的在線更新問題。
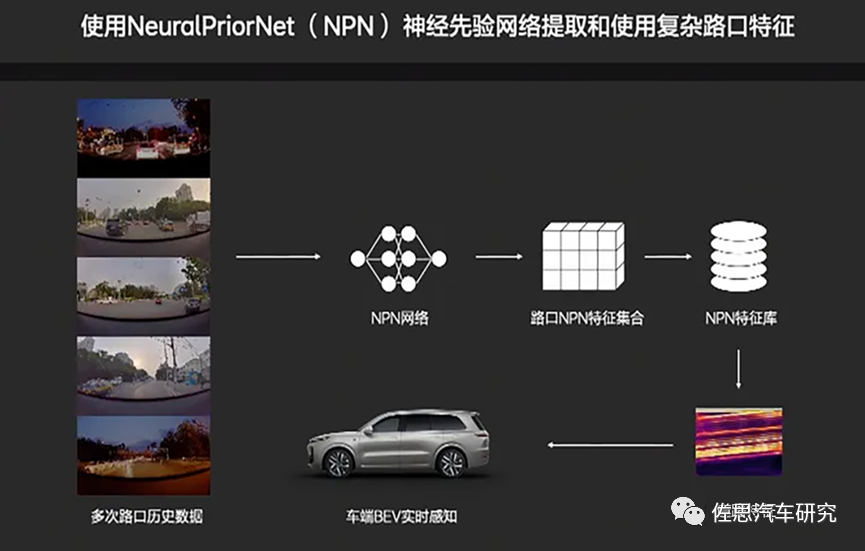
來源:理想
從主機廠的方案看,“輕地圖”方案雖然對高精度地圖的依賴度降低,但對車端感知和算法的要求變得更高。
傳統圖商順應需求推出輕量化自動駕駛地圖解決方案
主機廠“不依賴高精度地圖”的呼聲越來越高,傳統圖商也在順應市場需求,做出改變,積極改善高精度地圖的三大痛點:更新頻率、覆蓋面積、成本,推出更符合現階段自動駕駛需求的地圖產品。
主流圖商智駕地圖布局

來源:佐思汽研《2024年自動駕駛地圖行業研究報告》
百度
2023年7月,推出人機共駕地圖Baidu MapAuto 6.5,是全3D車道級地圖、是全場景人機共駕地圖,可以提供SD、LD和HD三種數據。其中,SD數據已覆蓋全國,當前已在1000萬車輛上搭載。LD百度輕地圖數據服務由車道級拓撲、復雜場景幾何、經驗圖層、動態信息圖層組成,實現了天級更新。
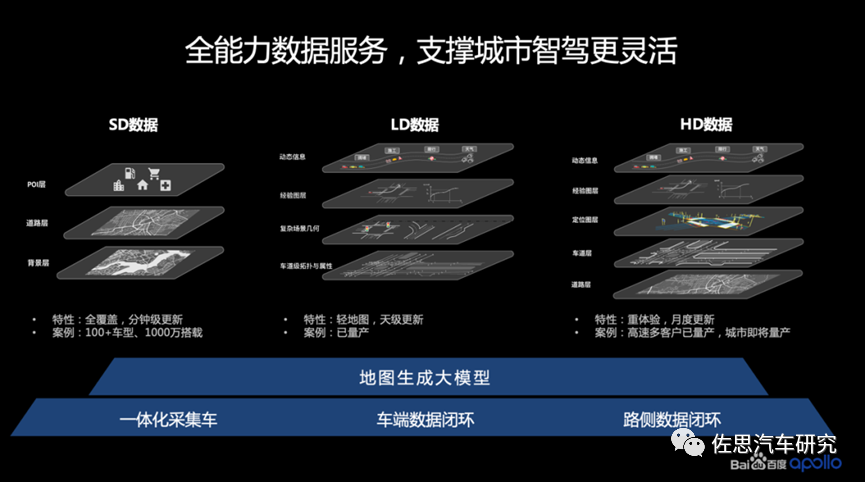
來源:百度
高德
2023年6月推出全新的HQ Live MAP,融合了HD MAP和SD MAP的優點。HQ Live MAP雖在精度方面無法達到HD MAP(絕對精度50cm,相對精度10cm)的細致程度,但對于高級輔助駕駛的場景來說也已足夠(高速和城市快速路場景:絕對精度1m,相對精度30cm;城區普通路場景:相對精度1m),同時還簡化了城區普通路場景中不必要的地圖元素,進一步降低了制作和部署成本。
騰訊
2023年9月發布最新的智駕云圖,實現自動駕駛地圖的全面云化,支持要素級、分鐘級在線更新,并且支持圖商、車企、自動駕駛公司等角色協同共建。
騰訊智駕云圖擁有可擴展的多圖層形態,包含基礎地圖圖層、更新要素圖層、ODD動態圖層、駕駛經驗圖層、運營圖層等,車企可根據自身需求靈活配置并管理圖層,并通過與車企自身數據圖層結合,搭建適合自身的數據驅動運營平臺。

來源:騰訊
佐思汽研《2024年自動駕駛地圖行業研究報告》主要研究內容如下:
自動駕駛地圖相關政策、法規、標準等制定情況研究;
城市NOA發展下車載地圖的發展方向、傳統圖商應對策略,城市NOA用的主要地圖種類等情況研究;
高精度地圖市場現狀、市場規模、企業格局、商業模式、發展難點等情況研究;
智駕地圖不同的應用場景,包括乘用車高速自動駕駛、低速泊車、無人駕駛載人、無人駕駛載物等情況研究;
國內外主要圖商的地圖產品系列、新產品布局、產品應用合作等情況研究;
高精度地圖相關技術支持公司主要技術布局、新技術研發等情況研究。
-
算法
+關注
關注
23文章
4702瀏覽量
94930 -
自動駕駛
+關注
關注
788文章
14241瀏覽量
169885 -
大模型
+關注
關注
2文章
3059瀏覽量
3892
原文標題:自動駕駛地圖研究:SD pro MAP快速上車,助力城市NOA輕地圖智駕方案
文章出處:【微信號:zuosiqiche,微信公眾號:佐思汽車研究】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
自動駕駛中常提的“NOA”是個啥?

佑駕創新成功交付L4級自動駕駛小巴項目
小馬智行在北京開啟自動駕駛高快速路無人化測試
2024年自動駕駛行業熱點技術盤點
Robotaxi與城市NOA緣何成為2024智駕行業關鍵詞?
從《自動駕駛地圖數據規范》聊高精地圖在自動駕駛中的重要性

2024城市NOA產研報告發布:誰才是第三方智駕供應商之首
L4算法公司如何助力城市NOA加速落地?
城市NOA是評價智駕能力的唯一標準嗎?
自動駕駛無圖方案真的可行嗎?
實現自動駕駛,唯有端到端?

FPGA在自動駕駛領域有哪些優勢?
FPGA在自動駕駛領域有哪些應用?
拋棄高精度地圖舊模式,走向視覺感知新時代?





 工商網監
工商網監
評論