 什么是CAN2.0協議?
什么是CAN2.0協議?

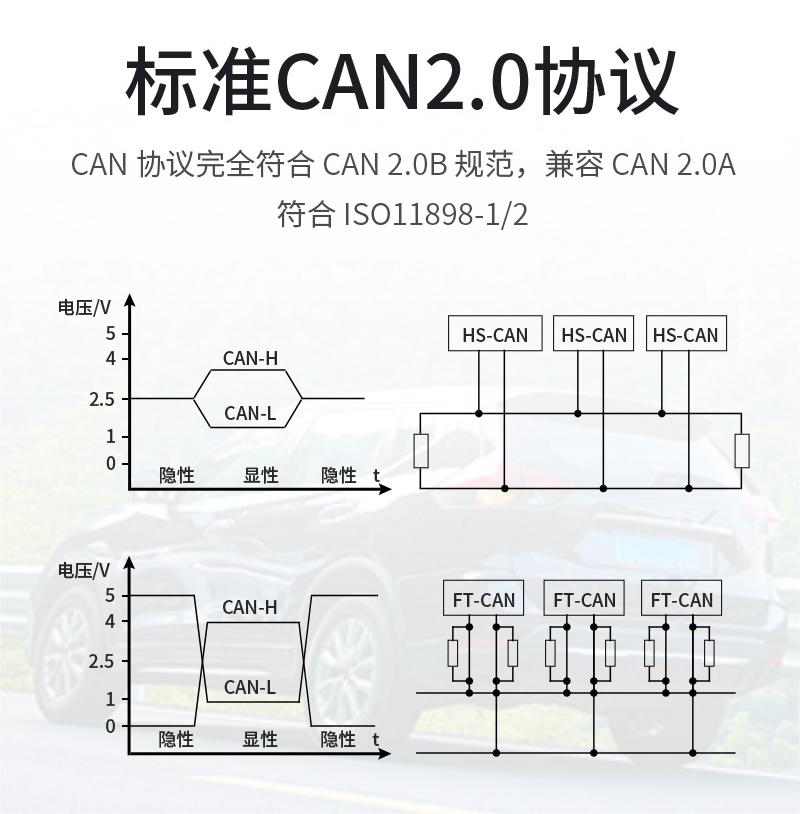
CAN2.0協議是控制器局域網絡(Controller Area Network, CAN)的一種版本,也被稱為傳統CAN協議,由德國博世BOSCH公司開發,并已成為國際上廣泛應用于汽車電子、工業自動化控制以及其他分布式控制系統中的現場總線標準之一。CAN協議在設計時注重實時性能、錯誤檢測與恢復機制以及網絡節點間的高效通信。
在CAN2.0規范中,主要有2種報文格式:
①CAN 2.0A
CAN2.0A支持標準幀格式(Standard Frame Format),這種格式的標識符長度為11位,適用于不需要大量節點或者復雜網絡結構的應用場景。
②CAN 2.0B
除了支持標準幀格式之外,CAN2.0B還引入了擴展幀格式(Extended Frame Format),其標識符長度增加到29位,這極大地擴展了網絡中可尋址節點的數量和數據的多樣性,解決了CAN網絡中可能存在的標識符資源不足的問題。
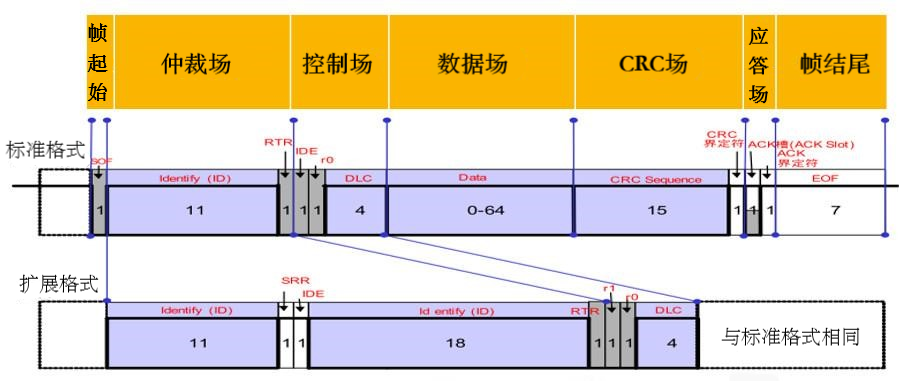
CAN 2.0標準數據幀結構
? 幀起始:標志數據幀和遠程幀的起始,它僅由一個“顯性”位構成。
? 仲裁場:由標識符(ID)和遠程發送請求(RTR)位組成。標識符的長度為11位,這些位以ID-10至ID-0的順序發送,最低位為ID-0,其中最高7位(ID-10 ~ID-4)必須不是全“隱性”。RTR位在數據幀中,必須是“顯性”的;而在遠程幀中,RTR位必須是“隱性”的。
? 控制場:由6位組成,包括兩個用于將來擴展的保留位和4位數據長度碼。
? 數據場:由數據幀中被發送的數據組成,它可包括0至8個字節,每個字節包括8位,其中首先發送最高有效位(MSB)。
? CRC場:包括CRC序列、CRC界定符。
? 應答場:2位長度,包括應答間隙和應答界定符。
? 幀結束:每個數據幀和遠程幀均是由7個“隱性”位組成的標志序列界定的。
與標準數據幀相比,擴展數據幀的ID為29-bit,控制場的IDE-bit為1。兩種幀格式的區別通過“控制場”中的“識別符擴展”位來實現。
CAN2.0協議的數據傳輸特性包括多主站通信、非破壞性仲裁、錯誤檢測和通知機制等,這些特點確保了即使在網絡負載重或出現故障的情況下,也能保持高可靠性和實時性通信。
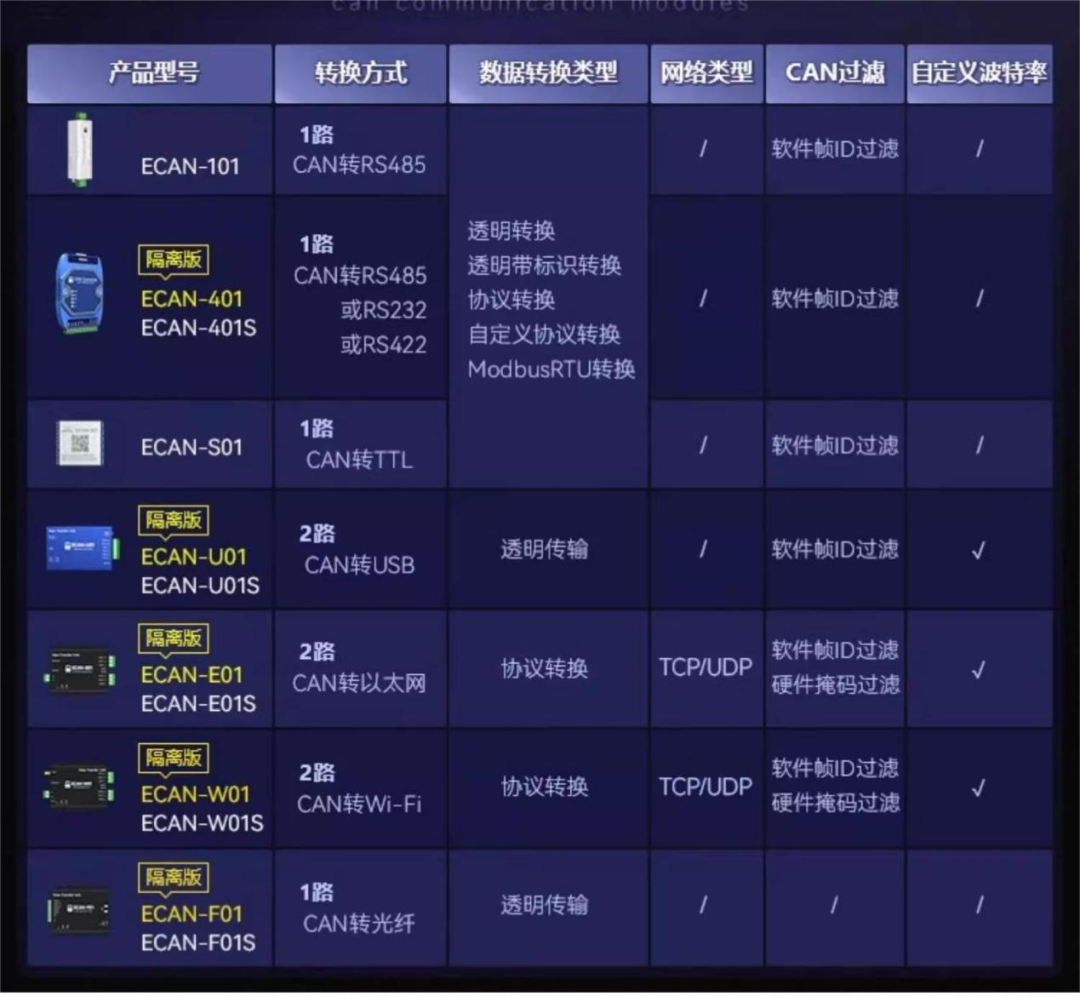
億佰特自主研發的高性能CAN協議轉換器/轉換模塊ECAN系列,可以實現CAN與串口RS232/RS485、TTL、USB、光纖、Wi-Fi等不同協議數據之間的雙向轉換。具有體積小巧、方便安裝等特點,支持標準CAN2.0協議,在CAN-BUS類產品開發、數據分析應用中具有極高的性價比,是工程應用、項目調試及產品開發的可靠助手。
-
控制器
+關注
關注
114文章
17113瀏覽量
184343 -
汽車電子
+關注
關注
3037文章
8349瀏覽量
170175 -
CAN
+關注
關注
57文章
2920瀏覽量
467841
發布評論請先 登錄
科普一下CAN總線的基礎知識

飛凌嵌入式ElfBoard ELF 1板卡-開發板適配之FLEXCAN
嵌入式學習-飛凌嵌入式ElfBoard ELF 1板卡-開發板適配之FLEXCAN
基于CAN總線的越野車車踏控制器研發 主控是SLH89F5162
飛思卡爾IMX6主板/工控板,視頻解碼能力超強
Freescale i.MX6主板/工控板,性價比極高
關于CAN2.0協議(AB)與CANBASIC報文的一些疑問
CAN支持CAN2.0協議中提到的自動重傳功能,為什么找不到?
工業CAN2.0及CAN-FD隔離器及共模干擾抑制模組
步進驅動、控制一體式電動夾爪





 工商網監
工商網監
評論