") H橋的工作原理 H橋的控制方式有哪些
H橋的工作原理 H橋的控制方式有哪些
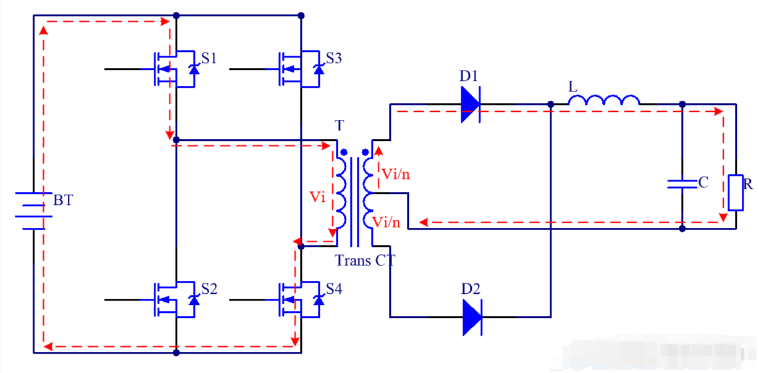
H橋是一種用于控制電機方向和速度的電力電子電路。它由四個開關(guān)器件(可以是晶體管、MOSFET、IGBT等)組成,其布局類似于字母“H”,因此得名。H橋允許電流在兩個方向上流動,從而可以控制電機的正轉(zhuǎn)和反轉(zhuǎn),廣泛應(yīng)用于電動汽車、機器人、工業(yè)控制系統(tǒng)等領(lǐng)域。
H橋的工作原理
H橋的基本結(jié)構(gòu)包括四個開關(guān)器件,通常兩兩相對,分別控制電流的正向和反向流動。每個開關(guān)器件可以獨立控制,以實現(xiàn)不同的電流流向。
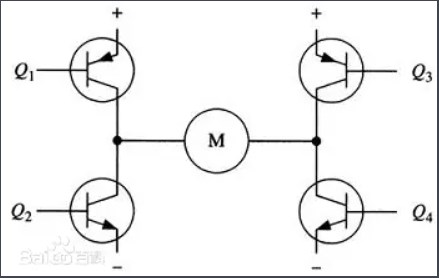
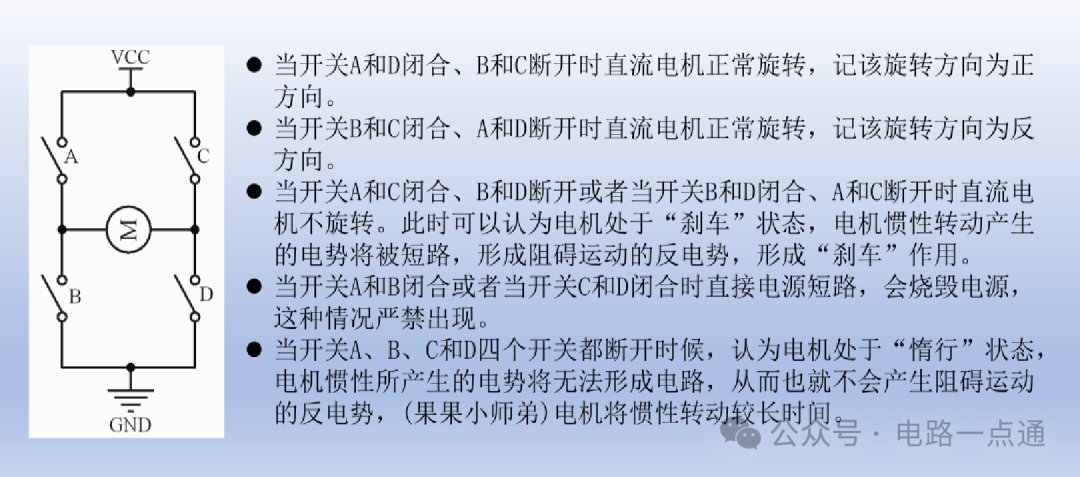
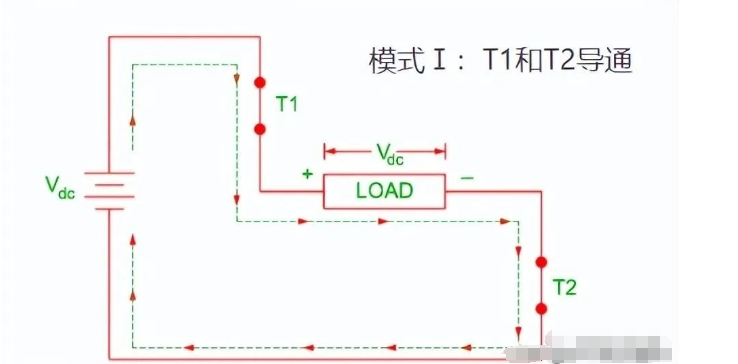
1.正向轉(zhuǎn)動 :要使電機正向轉(zhuǎn)動,需要同時打開H橋的對角線上的兩個開關(guān)器件,例如Q1和Q4,同時關(guān)閉Q2和Q3。這樣電流就可以從電源正極經(jīng)過Q1,流向電機,再經(jīng)過電機流向Q4,回到電源負極。
2.反向轉(zhuǎn)動 :要使電機反向轉(zhuǎn)動,需要打開H橋的另外一對對角線上的兩個開關(guān)器件,即Q2和Q3,同時關(guān)閉Q1和Q4。這樣電流就可以從電源正極經(jīng)過Q2,流向電機,再經(jīng)過電機流向Q3,回到電源負極。
3.停止 :要停止電機,可以同時關(guān)閉所有開關(guān)器件,或者使H橋的對角線上的兩個開關(guān)器件同時打開,這將導(dǎo)致電機處于“剎車”狀態(tài)。
4.脈寬調(diào)制(PWM) :通過調(diào)整開關(guān)器件的占空比,可以控制電機的平均電壓和速度。PWM控制是一種常用的電機速度控制方法,它通過快速開關(guān)器件,生成一系列脈沖寬度不同的信號,從而實現(xiàn)對電機速度的精確控制。
H橋的控制方式
H橋的控制方式多樣,可以根據(jù)不同的應(yīng)用需求選擇最合適的控制策略。
1.開關(guān)控制 :最基本的控制方式,通過簡單的開關(guān)邏輯來控制電機的轉(zhuǎn)動方向。
2.PWM控制 :通過調(diào)整PWM信號的占空比,可以控制電機的轉(zhuǎn)速和扭矩。PWM控制可以實現(xiàn)平滑的速度變化和較高的控制精度。
3.電流控制 :在一些應(yīng)用中,需要精確控制電機的電流,以保護電機免受過載或過熱的損害。電流控制通常與PWM控制結(jié)合使用。
4.傳感器反饋控制 :在閉環(huán)控制系統(tǒng)中,可以使用傳感器(如編碼器或霍爾效應(yīng)傳感器)來監(jiān)測電機的速度和位置,并將這些信息反饋到控制器中,以實現(xiàn)精確的速度和位置控制。
5.微控制器控制 :微控制器(如Arduino、STM32等)可以用于實現(xiàn)復(fù)雜的控制算法,如PID控制、模糊控制等,以提高系統(tǒng)的穩(wěn)定性和響應(yīng)性。
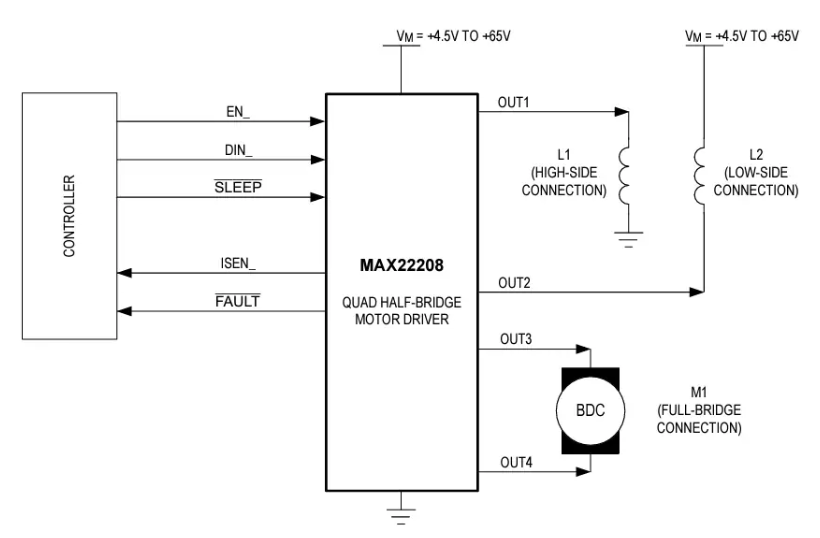
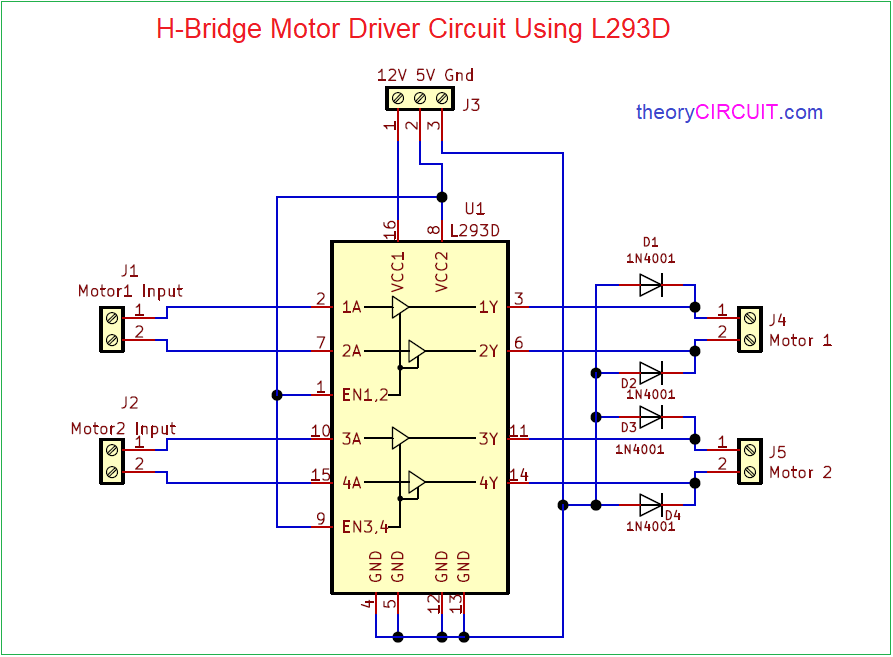
6.集成電路控制 :一些專用的集成電路(如L293D、L298N等)提供了H橋驅(qū)動和控制的一體化解決方案,簡化了電路設(shè)計和控制算法的實現(xiàn)。
7.通信接口控制 :在現(xiàn)代自動化系統(tǒng)中,H橋可以通過通信接口(如I2C、SPI、CAN等)與主控制器或其他智能設(shè)備連接,實現(xiàn)遠程控制和數(shù)據(jù)交換。
8.軟件控制 :在計算機控制系統(tǒng)中,可以使用軟件來生成控制信號,并通過數(shù)字-模擬轉(zhuǎn)換器(DAC)或通信接口將這些信號傳遞給H橋。
結(jié)論
H橋是一種非常靈活的電機驅(qū)動電路,其工作原理和控制方式可以根據(jù)不同的應(yīng)用需求進行調(diào)整。從簡單的開關(guān)控制到復(fù)雜的微控制器和軟件控制,H橋提供了廣泛的控制選項,以滿足各種電機控制應(yīng)用的需求。
-
MOSFET
+關(guān)注
關(guān)注
150文章
8341瀏覽量
218808 -
IGBT
+關(guān)注
關(guān)注
1277文章
4032瀏覽量
253623 -
晶體管
+關(guān)注
關(guān)注
77文章
9989瀏覽量
140814 -
PWM控制
+關(guān)注
關(guān)注
7文章
195瀏覽量
27014 -
H橋
+關(guān)注
關(guān)注
5文章
110瀏覽量
32250
發(fā)布評論請先 登錄
Analog Devices / Maxim Integrated MAX22208四路半H橋驅(qū)動器數(shù)據(jù)手冊
【H橋電機驅(qū)動電路原理】-學(xué)習(xí)筆記
HTD9801雙通道H橋電機驅(qū)動芯片中文手冊
應(yīng)用在工業(yè)自動化領(lǐng)域的雙通道H橋電流控制電機驅(qū)動器-SS8844T

額定電源電壓為42V+兩個H橋驅(qū)動器的雙橋電機驅(qū)動芯片-SS6810R

無橋PFC工作原理和電路結(jié)構(gòu)
h橋驅(qū)動電路使電機正反轉(zhuǎn)原理
使用MSPM0 MCU為步進電機和有刷直流(BDC)電機實現(xiàn)優(yōu)化的H橋驅(qū)動器控制

半橋驅(qū)動器的工作原理和應(yīng)用
有橋pfc與無橋pfc的區(qū)別是什么
全橋變換器的控制方式和工作原理
全橋變換器的工作原理和應(yīng)用
單相全橋逆變電路移相調(diào)壓方式的工作原理? 單相全橋逆變器的模式
H橋電機驅(qū)動電路電路圖 H橋電機驅(qū)動電路的工作原理和控制方式





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論