") 基于導(dǎo)納控制的機(jī)器人拖動示教原理和實現(xiàn)步驟
基于導(dǎo)納控制的機(jī)器人拖動示教原理和實現(xiàn)步驟

基于導(dǎo)納控制的機(jī)器人拖動示教是一種常用的機(jī)器人控制策略,它允許人與機(jī)器人直接互動,實現(xiàn)自然、直觀的控制。在導(dǎo)納控制中,機(jī)器人被建模為一個力控制系統(tǒng),其動力學(xué)特性由一個等效的導(dǎo)納(Admittance)模型描述。導(dǎo)納模型類似于彈簧和阻尼器的組合,用來描述機(jī)器人對外部力和運動的響應(yīng)。
 機(jī)器人拖動示教系統(tǒng)DMC600M
機(jī)器人拖動示教系統(tǒng)DMC600M
1. 原理
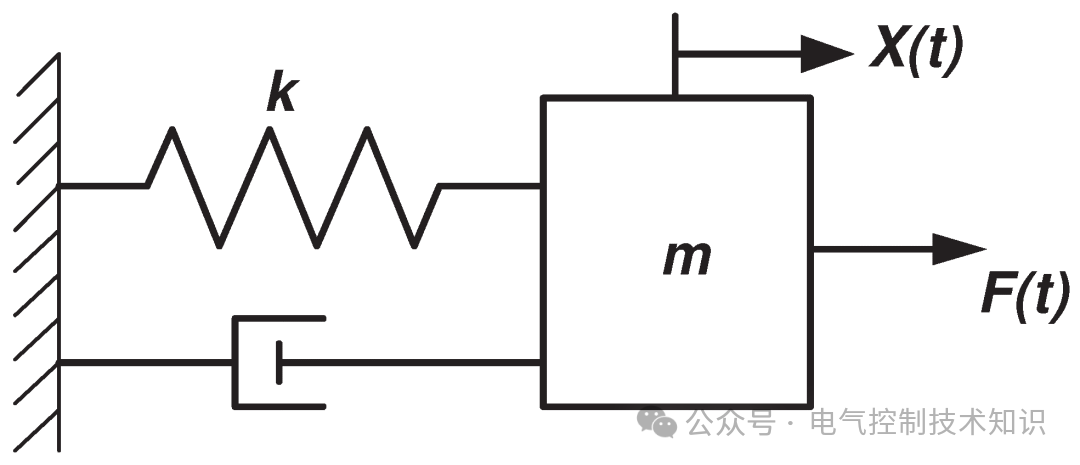
導(dǎo)納模型:機(jī)器人導(dǎo)納控制(Admittance Control)是一種機(jī)器人控制策略,用于實現(xiàn)機(jī)器人與外部環(huán)境的力互動和力控制。它的基本原理是將機(jī)器人建模為一個力控制系統(tǒng),類似于一個彈簧-阻尼系統(tǒng),可以模擬機(jī)器人對外部施加的力和力矩的響應(yīng)。機(jī)器人導(dǎo)納控制的核心思想是響應(yīng)外部施加在機(jī)器人上的力,而不是預(yù)定軌跡或位置。這使得機(jī)器人能夠適應(yīng)不同的力互動情境,例如與人類操作員互動或在不確定環(huán)境中工作。
拖動示教原理:用戶通過手動操作機(jī)器人的末端或者與機(jī)器人連接的操縱桿,機(jī)器人根據(jù)導(dǎo)納模型的響應(yīng),實時地跟隨用戶的運動,并且對外部施加的力量有一定的響應(yīng)。這種方式使得用戶可以直觀地引導(dǎo)機(jī)器人完成任務(wù),例如在裝配過程中引導(dǎo)機(jī)器人拖動零部件。
2. 實現(xiàn)步驟
1.傳感器配置:安裝力傳感器或力/力矩傳感器在機(jī)器人的末端,用于實時測量外部施加在機(jī)器人上的力和力矩。
2.導(dǎo)納模型設(shè)計:根據(jù)任務(wù)需求和用戶操作特性,設(shè)計適當(dāng)?shù)膶?dǎo)納模型,包括剛度和阻尼參數(shù)。
3.力控制器設(shè)計:開發(fā)基于導(dǎo)納模型的力控制器,該控制器根據(jù)測得的外部力和期望的導(dǎo)納模型響應(yīng),計算機(jī)器人的控制命令,使得機(jī)器人末端的力和運動響應(yīng)用戶的操作。
4.示教過程:用戶通過手動操作機(jī)器人末端或操縱桿,機(jī)器人根據(jù)力控制器的指令實時跟隨用戶的運動。在這個過程中,機(jī)器人的運動受到用戶施加的力的影響。
5.性能實現(xiàn)和優(yōu)化:在實際應(yīng)用中,可能需要進(jìn)行性能優(yōu)化,包括導(dǎo)納模型參數(shù)的調(diào)整、控制器的增益調(diào)整,以及對傳感器數(shù)據(jù)的濾波和校準(zhǔn),以提高機(jī)器人的控制精度和穩(wěn)定性。
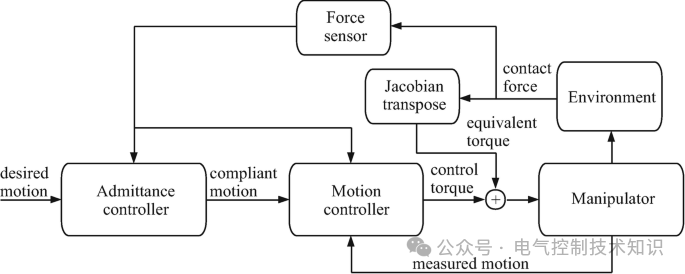
導(dǎo)納控制通常用于控制與環(huán)境或物體進(jìn)行物理交互的機(jī)器人。其目標(biāo)是在交互扳手和機(jī)器人運動之間實現(xiàn)所需的導(dǎo)納特性。
拖動示教通過直接在機(jī)器人末端或者連桿上施加一定方向的力,控制器力檢測系統(tǒng)估算外部拖動力矩,引導(dǎo)機(jī)器人做相應(yīng)的跟隨運動,然后記錄拖動過程位置,完成示教工作。
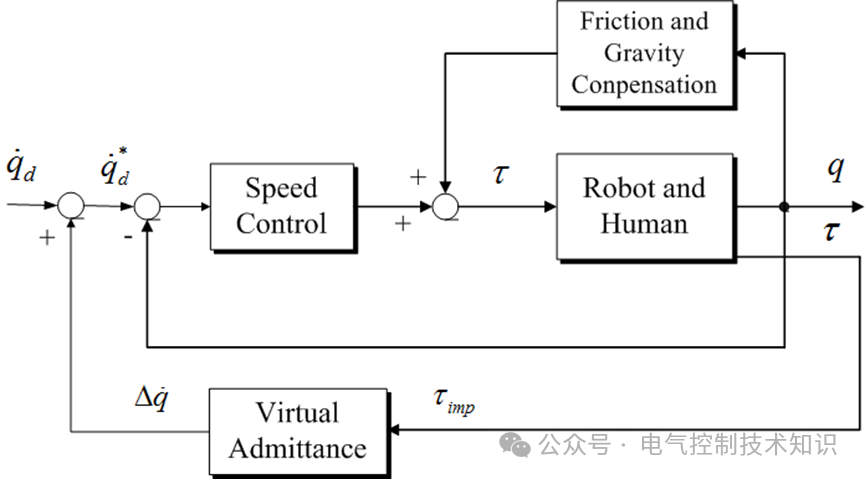
示教過程中,需要克服機(jī)器人連桿重力矩、摩擦力矩和慣性力矩。
基于動力學(xué)模型拖動示教模塊主要分為四大功能部分:動力學(xué)參數(shù)辨識、動力學(xué)模型、力矩前處理以及拖動控制部分。
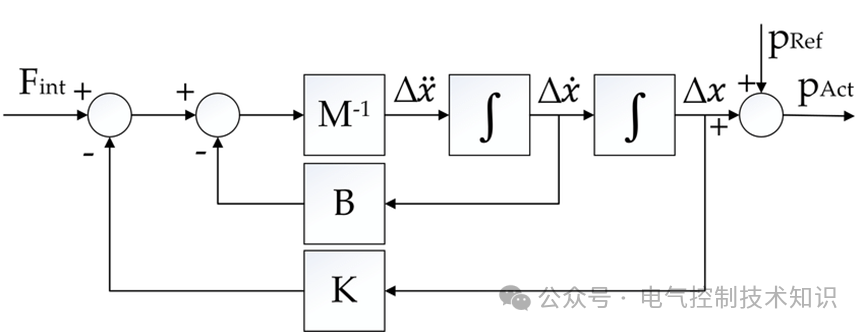
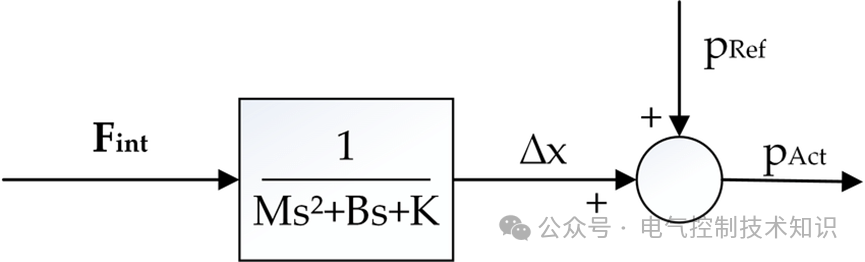
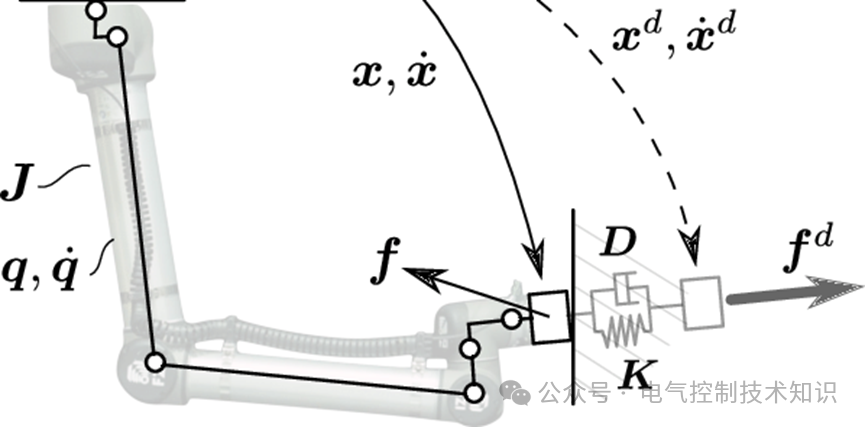
導(dǎo)納控制方式適合機(jī)器人拖動示教的運動控制實現(xiàn)。導(dǎo)納控制以外部拖動力矩作為輸入,按照彈簧-阻尼-振子二階系統(tǒng)運動規(guī)律,計算關(guān)節(jié)拖動跟隨的位置指令。導(dǎo)納控制將機(jī)器人連桿運動模擬成彈簧阻尼系統(tǒng)。
通過電機(jī)電流或關(guān)節(jié)力矩傳感器獲得關(guān)節(jié)力矩。
理想的零力模式是可以拖動機(jī)械臂到任何位置,但是導(dǎo)納/阻抗控制拖動機(jī)械臂的時候如果外力保持不變,那么將有一個拖動位置的極限。
應(yīng)用場景:對于移動下肢康復(fù),導(dǎo)納控制器用于讓推車以最小的努力隨患者移動。
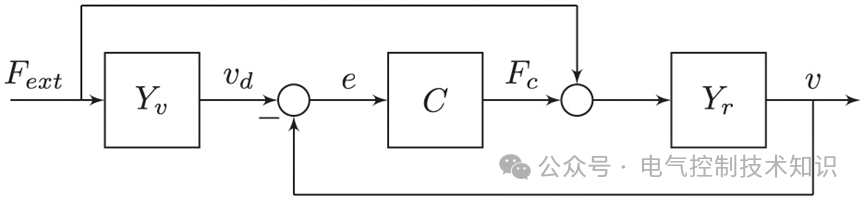
導(dǎo)納控制和阻抗控制之間的主要區(qū)別在于,前者在測量力后控制運動,后者在測量運動或偏離設(shè)定點后控制力。
導(dǎo)納控制與阻抗控制類似,旨在根據(jù)可編程的導(dǎo)納參數(shù)(即慣性、剛度和阻尼)向機(jī)器人施加受外部接觸力的所需的動態(tài)行為。
與計算參考關(guān)節(jié)扭矩的阻抗控制律不同,導(dǎo)納控制器的輸出是基于測量(或估計)接觸力的內(nèi)部運動控制回路的參考運動。
導(dǎo)納控制性能的評價通常涉及到以下幾個方面的考慮:
1.響應(yīng)速度(Response Speed):導(dǎo)納控制下的機(jī)器人對外部力的響應(yīng)速度是一個關(guān)鍵指標(biāo)。一個快速而穩(wěn)定的響應(yīng)可以提高機(jī)器人的操作效率,特別是在需要快速適應(yīng)外部力變化的任務(wù)中。
2.穩(wěn)定性(Stability):控制系統(tǒng)的穩(wěn)定性是非常重要的。導(dǎo)納控制系統(tǒng)應(yīng)該能夠保持穩(wěn)定的力平衡,避免因為外部干擾導(dǎo)致的不穩(wěn)定或振蕩。
3.力和運動的協(xié)調(diào)性(Force-Motion Coordination):導(dǎo)納控制下的機(jī)器人需要能夠協(xié)調(diào)外部施加的力和自身的運動,確保力和運動之間的平衡,使得機(jī)器人能夠穩(wěn)定地進(jìn)行任務(wù)操作。
4.適應(yīng)性(Adaptability):導(dǎo)納控制的一個優(yōu)勢是它的適應(yīng)性,即機(jī)器人可以適應(yīng)不同大小和方向的外部力。性能好的導(dǎo)納控制系統(tǒng)應(yīng)該能夠在不同工作環(huán)境和任務(wù)需求下表現(xiàn)出良好的適應(yīng)性。
5.抗干擾性(Disturbance Rejection):導(dǎo)納控制系統(tǒng)應(yīng)該能夠抵抗外部干擾,包括突然施加的力或者干擾力的變化。一個穩(wěn)定的導(dǎo)納控制系統(tǒng)應(yīng)該能夠迅速調(diào)整以抵消這些干擾。
6.用戶體驗(User Experience):如果導(dǎo)納控制用于人機(jī)互動,用戶體驗是非常重要的。控制系統(tǒng)應(yīng)該具有直觀性,讓用戶能夠自然地與機(jī)器人互動,并且有足夠的靈活性以適應(yīng)用戶的動作和需求。
7.能效(Energy Efficiency):機(jī)器人的能源消耗也是一個重要的性能指標(biāo)。高效的導(dǎo)納控制系統(tǒng)應(yīng)該能夠在維持穩(wěn)定性和性能的同時,盡量減少能源的消耗。
導(dǎo)納控制(Admittance Control)的內(nèi)涵:
1.力控制:導(dǎo)納控制的核心思想是以力為主導(dǎo)的控制策略。與傳統(tǒng)的位置控制不同,導(dǎo)納控制側(cè)重于機(jī)器人對外部力的響應(yīng)。
2.模型化:在導(dǎo)納控制中,機(jī)器人被建模為一個等效的力控制系統(tǒng)。這個模型通常包括導(dǎo)納模型,描述了機(jī)器人的剛度和阻尼特性,用于模擬機(jī)器人對外部力的響應(yīng)。
3.力和運動的平衡:導(dǎo)納控制追求力和運動的平衡。機(jī)器人可以根據(jù)外部施加的力來調(diào)整自身的運動,以保持力和運動之間的協(xié)調(diào)性。
4.適應(yīng)性:導(dǎo)納控制系統(tǒng)通常具有較強(qiáng)的適應(yīng)性,能夠適應(yīng)不同大小、方向和速度的外部力,以適應(yīng)不同的任務(wù)需求和工作環(huán)境。
5.用戶互動:導(dǎo)納控制常用于人機(jī)互動,用戶可以通過手動操作機(jī)器人的末端或操縱桿來引導(dǎo)機(jī)器人的運動,實現(xiàn)直觀的控制和協(xié)同工作。
6.穩(wěn)定性:控制系統(tǒng)的穩(wěn)定性是關(guān)鍵因素。導(dǎo)納控制系統(tǒng)應(yīng)該能夠在外部干擾和力變化的情況下保持穩(wěn)定,避免不穩(wěn)定或振蕩。
7.力平衡:導(dǎo)納控制力求維持力平衡,機(jī)器人對外部力的響應(yīng)應(yīng)該與外部力平衡,以實現(xiàn)控制目標(biāo)。
8.實時響應(yīng):導(dǎo)納控制要求機(jī)器人實時地對外部力和用戶輸入做出響應(yīng),以保持力和運動的協(xié)調(diào)性。
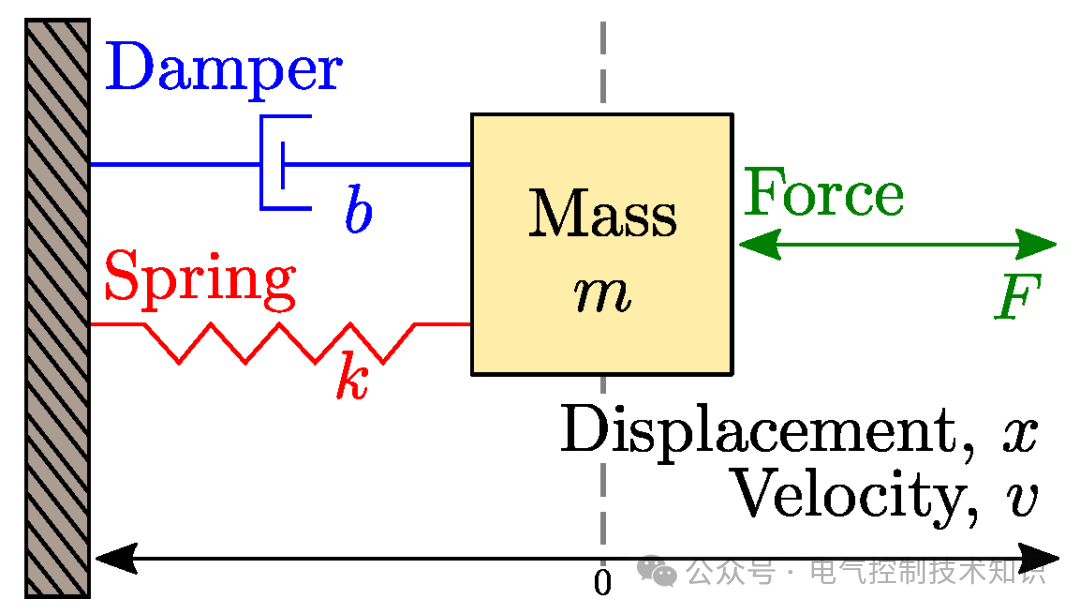
導(dǎo)納控制(Admittance Control)是一種機(jī)器人控制策略,專注于機(jī)器人與外部環(huán)境的力互動和力控制。它的核心思想是將機(jī)器人建模為一個力控制系統(tǒng),類似于彈簧和阻尼器的組合。這種控制策略允許機(jī)器人與外部環(huán)境產(chǎn)生力的互動,使機(jī)器人能夠適應(yīng)不同的力互動情境,例如與人類操作員互動或在不確定環(huán)境中工作。
1.導(dǎo)納模型:在導(dǎo)納控制中,機(jī)器人通常被建模為一個等效的導(dǎo)納模型,該模型包括兩個主要參數(shù):
剛度(Stiffness):剛度參數(shù)決定了機(jī)器人對外部力的響應(yīng)速度。更高的剛度會導(dǎo)致機(jī)器人更快地響應(yīng)外部力的變化,而更低的剛度使得響應(yīng)速度變慢。剛度通常以力/位移的比率表示。
阻尼(Damping):阻尼參數(shù)決定了響應(yīng)的平滑性。更高的阻尼會減緩機(jī)器人的響應(yīng)速度,減小振蕩,而更低的阻尼可能導(dǎo)致更不穩(wěn)定的響應(yīng)。阻尼通常以力/速度的比率表示。
1.力傳感器:為了實時監(jiān)測外部環(huán)境施加在機(jī)器人上的力和力矩,通常需要在機(jī)器人的末端或與外部環(huán)境連接的部分安裝力傳感器或力/力矩傳感器。這些傳感器提供了機(jī)器人的外部力信息。
2.力控制器:基于導(dǎo)納模型和傳感器測量值,導(dǎo)納控制系統(tǒng)中的力控制器計算機(jī)器人的關(guān)節(jié)力矩,以實現(xiàn)所期望的導(dǎo)納模型響應(yīng)。力控制器通過調(diào)整關(guān)節(jié)力矩以維持機(jī)器人與外部環(huán)境之間的力平衡。
3.用戶互動:導(dǎo)納控制通常用于人機(jī)互動或人機(jī)協(xié)同工作。用戶可以通過手動操作機(jī)器人的末端或操縱桿來引導(dǎo)機(jī)器人的運動,機(jī)器人會根據(jù)導(dǎo)納模型的響應(yīng)模式跟隨用戶的力和運動。
4.穩(wěn)定性:導(dǎo)納控制系統(tǒng)應(yīng)該保持穩(wěn)定性,避免不穩(wěn)定或振蕩的情況。穩(wěn)定性通常通過適當(dāng)選擇剛度和阻尼參數(shù)以及控制器設(shè)計來實現(xiàn)。
5.適應(yīng)性:導(dǎo)納控制系統(tǒng)具有一定的適應(yīng)性,能夠適應(yīng)不同大小、方向和速度的外部力。這使得機(jī)器人能夠在不同的任務(wù)需求和工作環(huán)境中表現(xiàn)出良好的適應(yīng)性。
6.任務(wù)執(zhí)行:導(dǎo)納控制廣泛應(yīng)用于任務(wù),如裝配、力導(dǎo)引操作、協(xié)作機(jī)器人、協(xié)助行動和協(xié)同操控等領(lǐng)域。機(jī)器人通過導(dǎo)納控制可以與人類或其他機(jī)器人協(xié)同工作,執(zhí)行需要力互動的任務(wù)。
原文標(biāo)題:基于導(dǎo)納控制的機(jī)器人拖動示教原理和實現(xiàn)步驟
文章出處:【微信公眾號:電氣控制技術(shù)知識】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
-
工業(yè)控制
+關(guān)注
關(guān)注
38文章
1539瀏覽量
86893
發(fā)布評論請先 登錄
盤點#機(jī)器人開發(fā)平臺
拖動示教噴涂設(shè)備有哪些部件組成?

【「具身智能機(jī)器人系統(tǒng)」閱讀體驗】2.具身智能機(jī)器人的基礎(chǔ)模塊
開源項目!能夠精確地行走、跳舞和執(zhí)行復(fù)雜動作的機(jī)器人—Tillu
【「具身智能機(jī)器人系統(tǒng)」閱讀體驗】2.具身智能機(jī)器人大模型
智能拖動示教噴涂機(jī)器人:技術(shù)革新與未來展望

三分鐘讓你明白拖動示教噴涂機(jī)器移動速度是多少

什么是拖動示教?機(jī)器人拖動示教方式分析

焊接機(jī)器人示教模式怎么設(shè)置






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論