 安泰功率放大器應用:驅動超聲波作動器
安泰功率放大器應用:驅動超聲波作動器

機器人具有輪式、足式、蛇形、爬行、飛行、游動等豐富的運動形式(圖1)。在目前的研究中,機器人空中與水中的運動通常采用飛行與游動方式,陸上運動則以輪式、足式、蛇形、爬行等方式為主。相較于蛇形、爬行等復雜運動,輪式、足式和輪足式機器人的運動機理清晰,更便于機器人的設計與操控,相關研究成果也較為豐富。驅動腿足、腿輪可有效增加機器人牽引力和負載力,同時使機器人更加適應崎嶇及不平坦路面環境。那么功率放大器能驅動超聲波作動器嗎?
▍“驅動器+腿足執行器”vs超聲驅動行波作動器
傳統多足機器人以“驅動器+腿足執行器”形成足結構,驅動足會增大機器人系統的體積,基于仿生運動實現多足協同運動的控制難度、系統集成難度和設計成本也隨之增大。
針對這一問題,受多足蟲“多足+爬行”運動方式的啟發,山東大學智能無人系統教育部工程研究中心吳疆副研究員以超聲行波驅動為基礎,研發了一種具有高負載和牽引能力的仿生超聲驅動行波作動器,該研究成果以 Development of a Self-Moving Ultrasonic Actuator With High Carrying/Towing Capability Driven by Longitudinal Traveling Wave 為題刊登在 IEEE/ASME TRANSACTIONS ON MECHATRONICS。
如圖2(a)所示,作動器振動體設計有多個仿蟲足矩形齒槽,以實現作動器構型與運動仿生,圖2(b)與圖2(c)展示了作動器運動特點與仿生思路,其最終構型如圖2(d)所示。作動器的尺寸長×寬×高為315mm×32mm×30mm,在頻率和峰值分別為27.8kHz和800V的交流電壓驅動下,負載能力可達6kg,是其自身重量的10.2倍,牽引能力可達24.5N,具有41.5N/kg的牽引力密度,運動性能優于現階段多數研究成果。得益于“多足+爬行”仿生設計,作動器在一定程度上繼承了生物體對各種路面環境的適應能力,可穿過30mm的“寬溝”,并在不同材質的“路面”上展現出較為理想的運動性能。此外,作動器采用超聲縱向行波驅動,可在無負載時達到65.8mm/s的運動速度。

圖2超聲作動器的設計仿真與構型視圖
▍為什么是縱向行波激勵?
超聲作動器振動傳播類型包括駐波和行波。通過激發彎振或縱振形成駐波同樣可達到驅動作動器沿一定軌跡運動的目的,這種方式在超聲作動器和超聲電機中經常使用。圖3展示了駐波方式驅動的多種超聲電機與超聲作動器。然而在駐波振動下,模態簡并使得系統的高度和長度難以大幅度改變,振動體結構復雜,在需要精確制造和安裝的場景下此方法極為受限。
以彎曲行波形成板狀超聲作動器是另一種常見的傳統作動器設計方法。相較于駐波,彎曲行波很容易在結構中被激發,但它們的機電耦合比縱向振動的行波作動器機電耦合弱,因此,采用夾持式換能器激勵的縱向行波作動器有利于實現良好的承載/牽引性能。
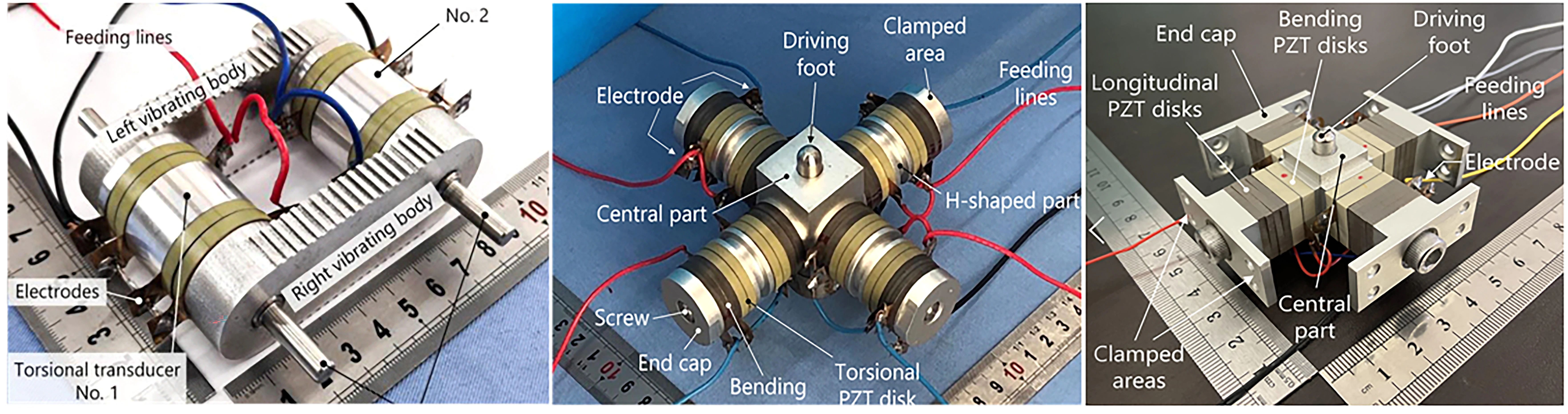
圖3駐波驅動的超聲電機與超聲作動器
▍行波驅動,多足協同
在縱向行波振動下,作動器中形成沿振動體方向并受兩端縱振換能器相位影響的“多足”協同爬行運動。在縱向行波影響下,每個“足端”作近似橢圓運動,其運動軌跡受結構的影響并在軌跡趨向圓形時獲得更優的承載/牽引能力。與此同時,“多足”在縱向行波影響下協同運動,可帶動作動器沿某個設定方向爬行。為了提高作動器的運動速度和負載性能,研究人員建立了如圖4所示的超聲作動器組端運動模型,最終實現作動器“行波驅動、多足協同”的仿生運動形態。
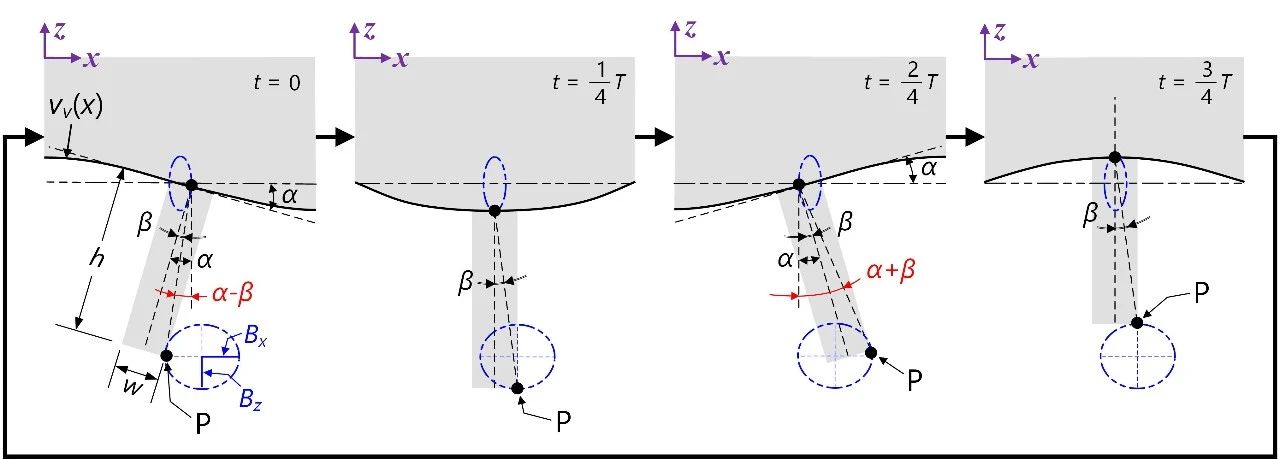
圖4超聲驅動行波作動器足端運動模型
圖5展示了超聲驅動行波作動器的運動過程。在作動器控制方面,超聲驅動行波作動器可通過調節頻率、相位設計與電壓,簡便地實現驅動器運動速度和運動方向的控制。
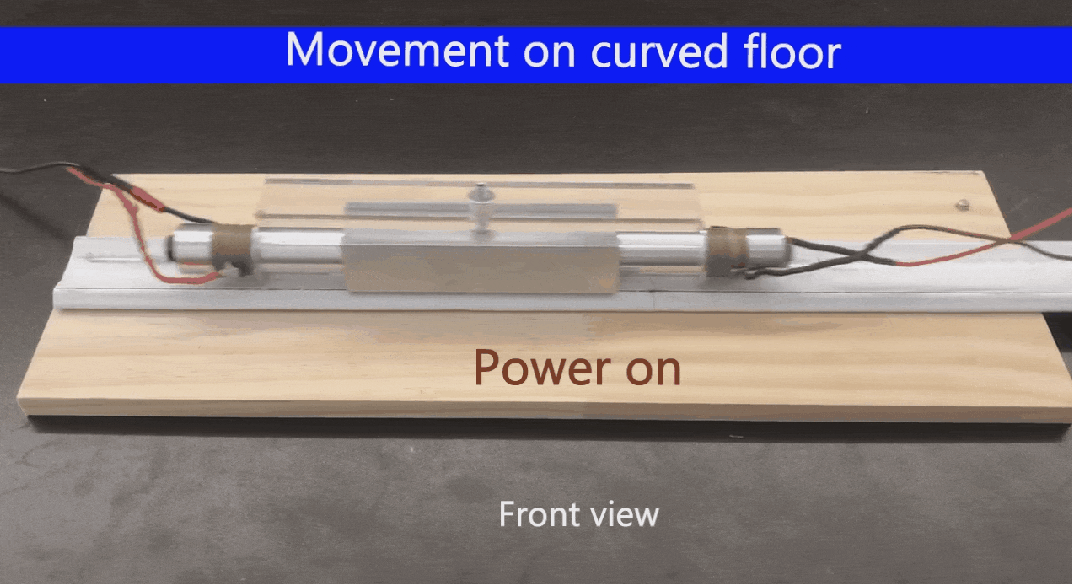
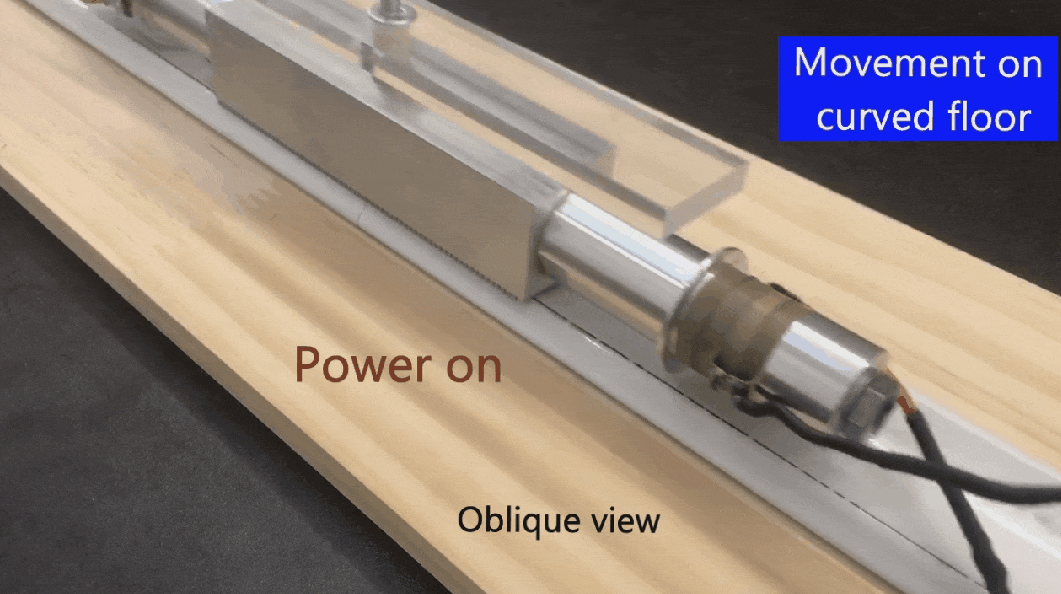
圖5超聲驅動行波作動器的運動過程
研究人員分別在木板和大理石材質模擬的路況下,對作動器速度進行了階躍響應測試。如圖6所示,在測試條件下,作動器在2種材質表面變現出的最大運動誤差不超過8%,體現了作動器良好的運動能力。
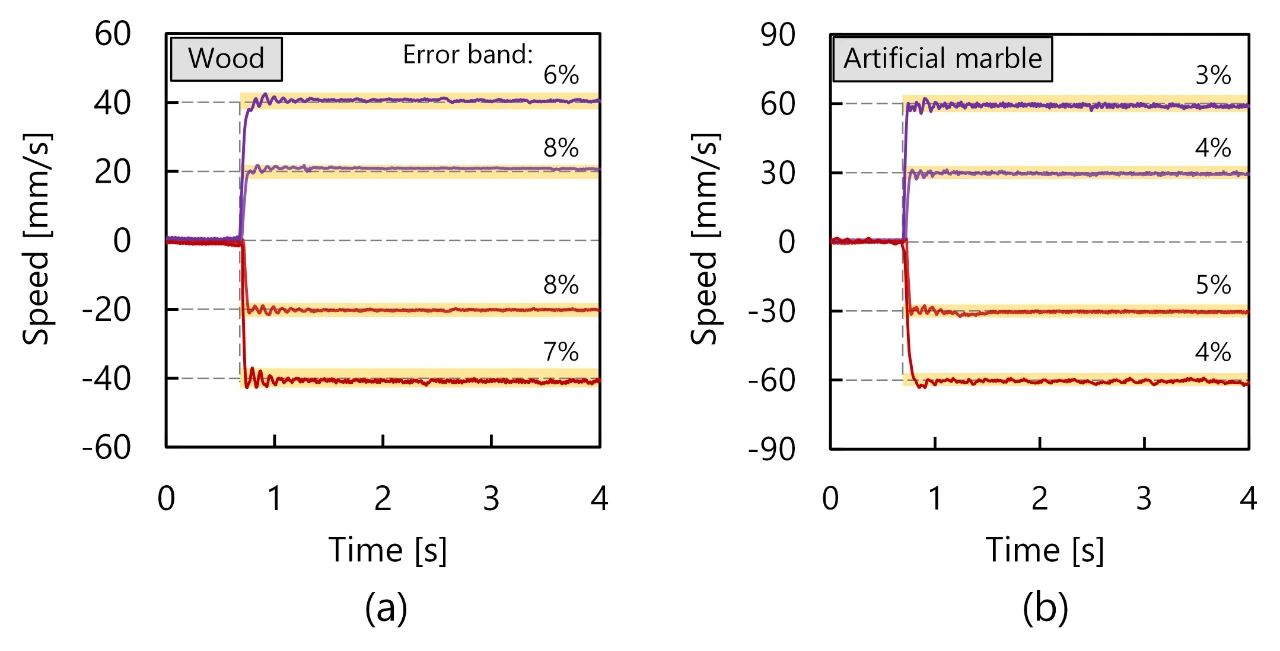
圖6超聲驅動行波作動器的速度階躍響應曲線
圖7展示了作動器對0.5~1Hz頻率動態變化速度信號的跟蹤效果,跟蹤誤差不超過7%,體現了作動器良好的動態響應能力。
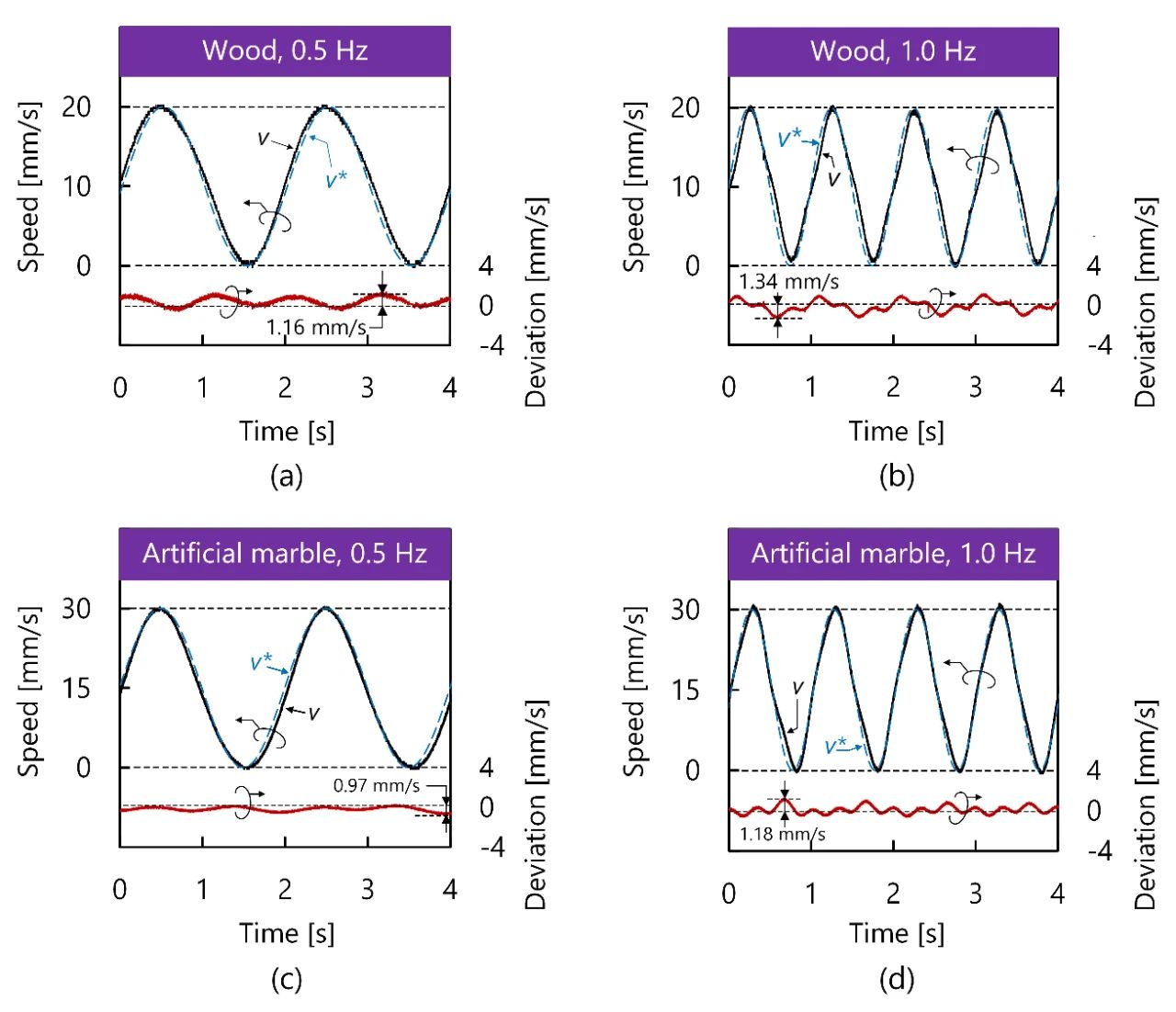
圖7超聲驅動行波作動器的速度動態響應曲線
如圖8所示,由于多足結構增加了作動器與地面的接觸“機會”,超聲驅動行波作動器可跨越30mm的距離,增加了作動器對復雜地面的適應能力,拓展了作動器的應用場景。
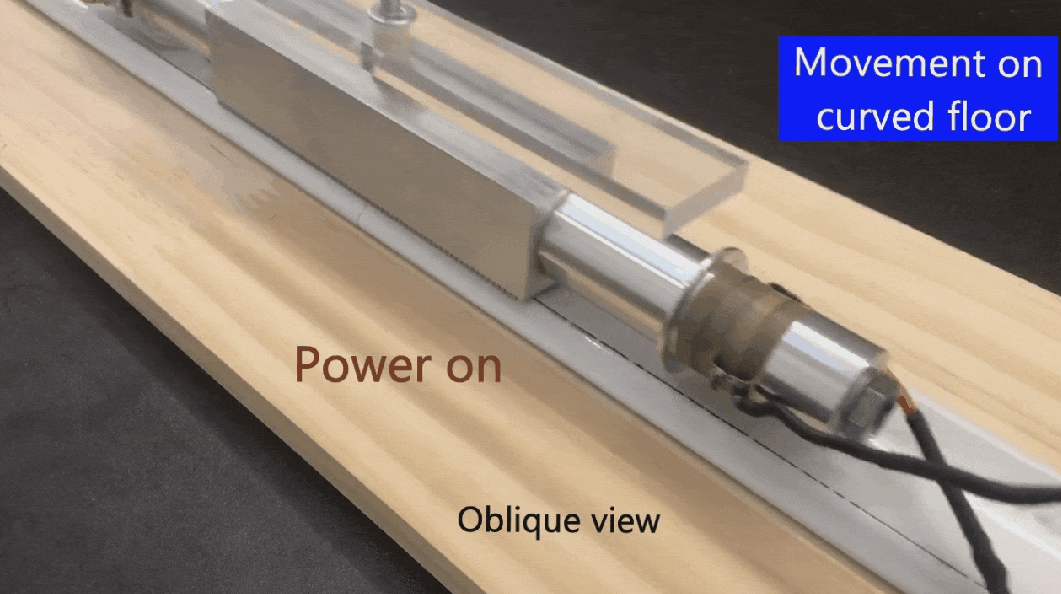
圖8超聲驅動行波作動器跨越寬溝的運動過程
ATA-68020功率放大器

ATA-68020是一款理想的單通道功率放大器。最大輸出850Vp-p(±425Vp)電壓,最大輸出電流2.12Ap,可與主流的信號發生器配套使用,實現信號的完美放大,同時它也是一款在超聲電機超聲制動器驅動中常用到的測試儀器儀表。
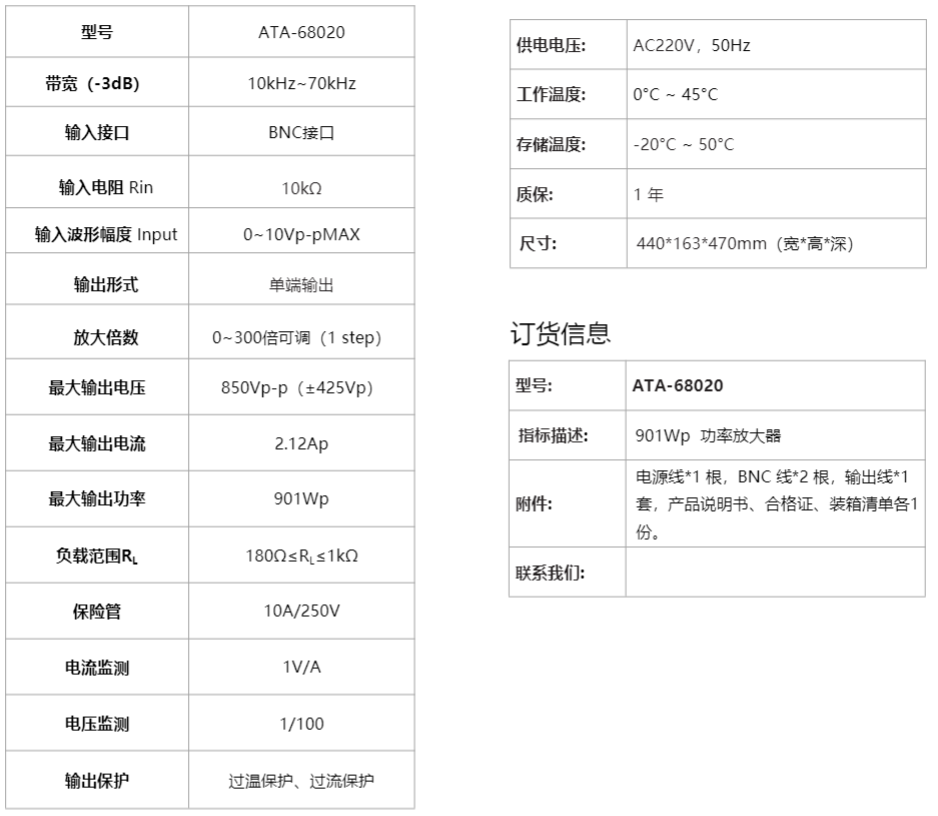
最大輸出電壓850Vp-p(±425Vp)
放大倍數0~300倍可調,1倍步進
輸入電阻10kΩ
單通道
與傳統“驅動器+執行器”的足式結構設計相比,超聲驅動作動器結構簡單,易于控制,為仿生運動與結構設計提供了新思路。但超聲驅動作動器離不開與之相匹配的高頻高壓供能與驅控系統的支持。因此,如何將直流電源、直流逆變電路、功放電路集成到超聲驅動作動器系統中,實現作動器機械系統與電氣系統的阻抗匹配,形成無線纜限制、大范圍可移動的超聲驅動作動器是未來具有重要意義的研究方向。功率放大器www.aigtek.com
審核編輯 黃宇
-
功率放大器
+關注
關注
102文章
3968瀏覽量
134471 -
超聲波
+關注
關注
63文章
3131瀏覽量
140190
發布評論請先 登錄
高壓功率放大器可以進行哪些超聲懸浮實驗
高壓功率放大器在生物和超聲領域中的作用和實驗
安泰高壓功率放大器在超聲波氣體中的作用是什么
安泰高壓功率放大器的原理及特點應用是什么
安泰高功率放大器作用是什么意思

Aigtek功率放大器如何驅動超聲波探頭
Aigtek:超聲波信號功率放大器的作用是什么
安泰功率放大器應用:超聲波水下傳輸距離如何測算
安泰功率放大器應用:超聲波換能器解析

安泰高電壓功率放大器在新能源領域超聲波噴涂技術中的應用
安泰:功率放大器影響因素分析

安泰功率放大器如何驅動20kHz水聲換能器超聲驅魚

安泰功率放大器驅動壓電陶瓷的應用領域有哪些
安泰功率放大器怎么使用






 工商網監
工商網監
評論