 自動駕駛L2與L3有什么區別?為什么車企不提L3?
自動駕駛L2與L3有什么區別?為什么車企不提L3?
[首發于智駕最前沿微信公眾號]隨著自動駕駛技術的不斷演進,智駕也從實驗室走向了普通消費者,現階段很多車企都相繼發布智駕車型,并已有很多消費者在日常出行中將其作為主要模式。但大家應該也發現了,現在各車企在宣傳自動駕駛技術,尤其是在工信部“強監管”后,大家對于自動駕駛的宣傳則更加保守。除了華為在近期的發布會中提到了高速L3商用解決方案外,其他的很多車企對于智駕系統的定義則稱為組合駕駛輔助,即L2級自動駕駛。為何大家都不敢宣傳L3?L2和L3到底有何區別?

L2和L3如何定義?
根據美國汽車工程師學會(SAE)發布的自動駕駛分級中,對于L2的定義為:在部分的場景中,無人駕駛系統可以完成部分操作,根據系統要求,人類需及時監控周邊環境,并需隨時可以接管車輛。這時駕駛操作的主體和監控車輛周邊環境的主體都是人類駕駛員,而無人駕駛系統只是對駕駛過程進行輔助。對于L3級的定義為:在部分的場景中,無人駕駛系統可以完成所有的操作,根據系統要求,人類提供適當的應答。其中駕駛操作的主體和監控車輛周邊環境的主體是無人駕駛系統,人類駕駛員僅需提供適當的支持。


感知系統會有何差別?
在自動駕駛系統中,感知是基礎也是核心。L2系統通常以視覺攝像頭和毫米波雷達為主,利用深度學習算法完成車道線識別、車輛與行人檢測,并結合毫米波雷達在惡劣天氣下對距離和速度的測量,從而實現自適應巡航與車道保持等功能。由于攝像頭受光照影響較大,毫米波雷達分辨率有限,二者融合雖能覆蓋絕大多數日常場景,卻難以在夜間、強光直射或隱蔽物體突現時保持高精度感知。
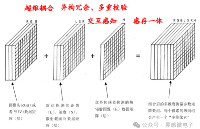
L3系統會在感知層面有質的飛躍,在L3階段,激光雷達將被納入標配,能夠實時輸出百萬點級別的三維點云,實現對周圍環境的細致刻畫;多顆毫米波雷達與環視攝像頭、超聲波傳感器共同構建四維冗余感知網絡,使得即便在大雨、大霧或夜間,系統也能保持對道路、障礙物和交通標志的高精度識別。激光雷達的加入不僅補齊了深度信息的短板,還為高精地圖的本地化匹配提供了可靠支撐,為L3系統在限定場景內的脫手駕駛奠定了前提條件。

算力平臺與算法架構有何差別?
L2與L3在算力需求上存在數量級的差距。L2系統普遍采用30–200TOPS(萬億次運算)級別的SoC,以滿足多路攝像頭、毫米波雷達數據的實時處理以及基礎路徑規劃、目標跟蹤算法的執行。其算法框架通常以單一路徑感知與決策為主,深度神經網絡承擔檢測與語義分割等任務,隨后由車輛ECU(電子控制單元)完成縱向與橫向控制命令的下發。
而L3系統則需要200–1000+TOPS的超高算力平臺。不僅要實時處理激光雷達點云,同時還需并行運行多模型融合算法、場景理解與行為預測,以及執行多重功能安全校驗。典型的L3算法棧包括基于圖優化的高精定位、點云語義分割、基于深度學習的目標預測與軌跡規劃,以及冗余決策模塊的交叉檢驗。所有關鍵路徑均需在主算與備算平臺上獨立實現,以便在任一路徑出現異常時,另一平臺可以無縫接管,保證安全落地。

系統冗余與功能安全有何差別?
在安全設計方面,ASIL(汽車功能安全等級)是衡量自動駕駛系統可靠性的關鍵標準。L2系統的冗余設計多停留在單一傳感或單一路徑的備份層面,少數高端車型會為攝像頭或毫米波雷達配備冗余單元,但在制動、轉向與動力傳動系統上并未做到雙路冗余。一旦關鍵部件失效,系統只能被動降級或完全退出,交還控制權給駕駛員。
L3系統將在冗余層面則做足文章,激光雷達、毫米波雷達、攝像頭等傳感器各自獨立運行,主算與備算平臺均具備完整的感知與決策能力;雙電源、雙通信鏈路、雙制動系統及雙轉向系統構成了全棧冗余設計,確保單一路徑或單個元件失效時,系統依然能夠維持基本的自動駕駛功能,并在必要時安全停車或駛入應急車道。這一全方位的冗余保障,使得L3系統能夠滿足ASIL-D級別的最高功能安全要求。

軟件架構與功能切換有何差別?
L2與L3在軟件控制和模式切換機制上亦大相徑庭。L2輔助駕駛模式的啟動與退出高度依賴駕駛員操作,車輛在開啟自適應巡航或車道保持前,需駕駛員手動按鍵確認,并在運行過程中持續檢測駕駛員的手部和視線狀態。一旦檢測到手離方向盤或視線未聚焦,系統會立即發出警告,隨后強制退出輔助駕駛模式。
L3系統則在其設計運行域(ODD)內實現閉環自動駕駛。軟件平臺通過實時監測環境條件、地圖匹配度和系統健康狀態,在檢測到超出ODD時發出接管請求;若駕駛員在限定時間內未接手,系統會自動執行最小風險策略,如減速至停或駛入應急車道。同時,L3系統能夠根據高精地圖預先掌握道路曲率、坡度與交叉口信息,并動態規劃路徑,無需駕駛員持續關注,實現真正意義上的“免監督”駕駛。

安全策略與風險管理有何區別?
在安全策略方面,L2系統的風險管理主要依賴駕駛員熟練度與系統警示。系統會在感知失真或算法不確定時,通過語音、儀表告警等方式提示駕駛員干預,但對于駕駛員未及時反應的情況,缺乏進一步的質量保證措施。
相比之下,L3系統在設計之初即將“風險分布權”納入考量,系統不僅要對外部環境風險進行量化評估,還要對自身運行狀態進行持續監測,并根據風險等級調整功能可用性。當外部風險或系統風險高于可控閾值時,系統會在最短時間內完成安全降級,并在必要時將車輛引導至安全區域停車,從而最大程度降低潛在事故損失。

L3有何挑戰?
技術升級往往伴隨著成本攀升,L2系統中,傳感器成本控制在一萬至三萬元人民幣之間,而L3系統僅激光雷達一項成本便可能高達數萬元,加之高算力芯片與冗余硬件投入,使整車成本提升五萬至十萬元不等。要實現大規模量產,必須在傳感器采購、計算平臺設計與供應鏈管理上取得突破,才能將L3整體成本壓降至合理區間。
此外,L3級別的自動駕駛要求無人駕駛系統可以很大程度上“獨立操作”,對于企業來說,若出現智駕事故,企業將對此負主要責任,因此企業在宣傳時,為減少責任糾紛,在技術未100%確保安全時,不會主動宣傳達到L3等級。

最后的話
隨著激光雷達等高精度傳感器成本逐年下降,法規與標準日趨完善,L3有條件自動駕駛有望從高端市場向中高端乃至入門級車型下探。同時,V2X(車聯網)與高精地圖的普及,也將為系統提供更豐富的路側與云端信息,進一步提高感知冗余度與決策精度。多傳感融合算法、強化學習與仿真技術的進步,更將不斷提升系統安全性與魯棒性。可以預見,L2與L3的界限在不斷模糊與移動,但以技術為驅動的分層設計依舊是行業健康發展的基石。
-
車聯網
+關注
關注
76文章
2641瀏覽量
92489 -
自動駕駛
+關注
關注
788文章
14223瀏覽量
169685
發布評論請先 登錄
L3級自動駕駛即將全面商用,眾車企蓄勢待發
激光雷達三大新品首發!L2/L3全域感知,激光雷達廠商圖達通重塑性能標桿

為什么車企不敢宣傳智駕系統達到L3?

從L0到L5自動駕駛技術的演進階段
東風嵐圖發布L3級智能架構天元智架
廣汽集團L3自動駕駛乘用車率先上市
產業鏈起飛!L3級自動駕駛年內有望落地
2026至2030年:Robotaxi趨向規模化,L3個人乘用車商業化新篇章開啟

當春節駕車返鄉擁有了L3/L4級自動駕駛
通用汽車正全力推進L3級自動駕駛系統的開發
奔馳L3自動駕駛升級:德國高速最快95km/h
自動駕駛步入L3階段 磁性元器件行業有何新機遇?
寶馬成為首家獲L2+與L3智駕系統組合認證車企
9大車企L3牌照測試出爐!車路云一體化加速,最新進展到哪了?






 工商網監
工商網監
評論