 EtherCAT轉Profinet網關與匯川伺服系統集成及輪廓模式應用解析
EtherCAT轉Profinet網關與匯川伺服系統集成及輪廓模式應用解析

EtherCAT轉Profinet網關與匯川伺服系統集成及輪廓模式應用解析
在工業自動化領域,實現不同總線協議設備間的無縫協作是提升生產效率的關鍵。本文將圍繞EtherCAT主站轉Profinet網關與匯川伺服系統的集成,重點解析輪廓模式下加減速控制的工程應用,為設備維護與系統集成提供參考實例。

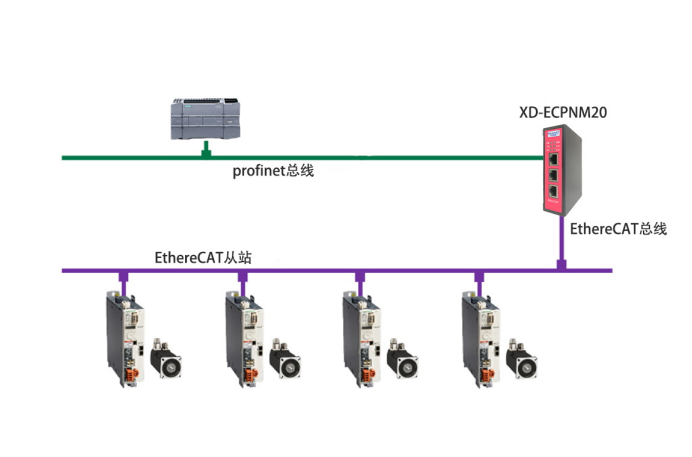
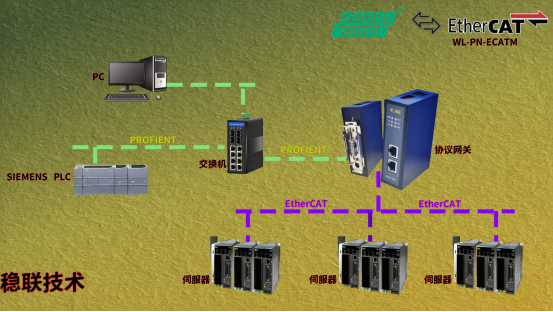
EtherCAT主站轉Profinet網關(如XD-ECPNM20)如同翻譯官,解決了不同總線語言設備的溝通難題。前者支持將EtherCAT從站設備(如伺服驅動器)接入Profinet網絡,后者則能實現Profinet主站到EtherCAT主站的轉換。選擇時需考慮控制器的兼容性
輪廓模式(又稱PV模式)是精密定位應用的利器。上位機只需設定目標位置、運行速度和加減速參數,伺服驅動器內部的位置軌跡發生器便會自動生成平滑的運動曲線,就像自動駕駛車輛根據導航規劃最優路徑。以匯川伺服為例,其內置的算法可將加減速過程分解為多段S型曲線,有效減少機械沖擊。實際測試顯示,在0.1秒內從0加速至3000rpm時,采用輪廓模式的振動幅度比傳統梯形加減速降低40%,顯著延長了傳動部件壽命。
硬件連接:用屏蔽雙絞線連接Profinet主站(如PLC)與EtherCAT主站轉Profinet網關PN接口,EtherCAT端通過RJ45或光纖串聯伺服驅動器。
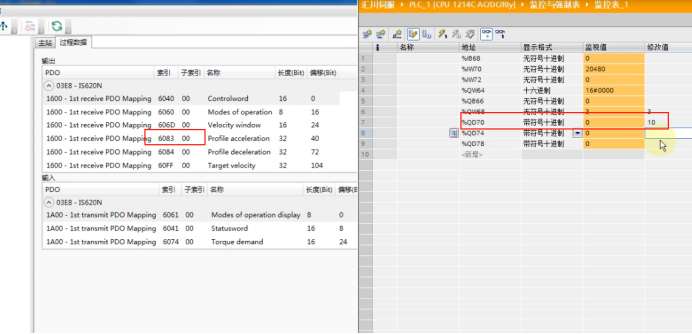
參數映射:在TIA Portal中,需將伺服的目標位置(0x607A)、實際速度(0x606C)等參數映射到EtherCAT主站轉Profinet網關的IO映像區。某汽車焊裝線案例中,工程師將32字節的PDO數據分為4個模塊,分別對應位置設定、實時反饋、故障代碼和扭矩限制。

曲線優化:通過HMI設置速度基準值(0x6081)和加減速時間(0x6083)。例如包裝機械的分度轉臺應用中,將加速時間設為200ms、減速度斜率調整為30%時,定位精度可穩定在±0.05mm內。
通過上述技術解析與案例分享,可以看出協議EtherCAT主站轉Profinet網關與伺服系統的深度協同,正在推動高端裝備制造向更柔性、更精準的方向發展。維護人員掌握這些核心要點,相當于獲得了診斷自動化系統神經網絡的聽診器。
-
通信協議
+關注
關注
28文章
1037瀏覽量
41251 -
網關
+關注
關注
9文章
5774瀏覽量
53181 -
Profinet
+關注
關注
6文章
1731瀏覽量
25773 -
ethercat
+關注
關注
19文章
1145瀏覽量
40196
發布評論請先 登錄
工業自動化中EtherCAT轉Profinet網關的速度控制模式配置與優化
EtherCAT轉Profinet網關在匯川伺服轉矩控制中的集成應用與實現

EtherCAT主站轉Profinet網關連接匯川伺服系統的操作模式控制技術方案
EtherCAT主站轉Profinet網關接匯川伺服實現速度控制功能
EtherCAT主站轉Profinet網關接匯川伺服操作模式的控制解析
基于EtherCAT轉Profinet網關接匯川伺服系統操作模式控制技術方案

匯川IS620N伺服驅動器如何通過etherCAT主站轉profinet網關與西門子1200plc通訊
禾川伺服驅動器與EtherCAT主站轉Profinet網關的雙向數據交換
SV660F伺服驅動器與EtherCAT主站轉Profinet網關通訊案例

EtherCAT主站轉Profinet網關接IS620N伺服驅動器與西門子plc通訊案例
號外!PLC安川伺服,通過Profinet轉EtherCAT網關同步多個工作站

跨協議智聯重構:臺達伺服器通過網關實現 Profinet 與 EtherCAT 的毫秒級對話
CANOpen轉PROFINET網關連接低壓伺服系統





 工商網監
工商網監
評論