") 無人駕駛 | 了解工作原理及關(guān)鍵技術(shù)
無人駕駛 | 了解工作原理及關(guān)鍵技術(shù)

一、無人駕駛汽車技術(shù)介紹
無人駕駛汽車是智能汽車的一種,也稱為輪式移動機(jī)器人,主要依靠車內(nèi)的以計(jì)算機(jī)系統(tǒng)為主的智能駕駛儀來實(shí)現(xiàn)無人駕駛的目標(biāo)。
據(jù)湯森路透知識產(chǎn)權(quán)與科技最新報(bào)告顯示,2010年到 2015年間,與汽車無人駕駛技術(shù)相關(guān)的發(fā)明專利超過22,000件,并且在此過程中,部分企業(yè)已嶄露頭角,成為該領(lǐng)域的行業(yè)領(lǐng)導(dǎo)者。
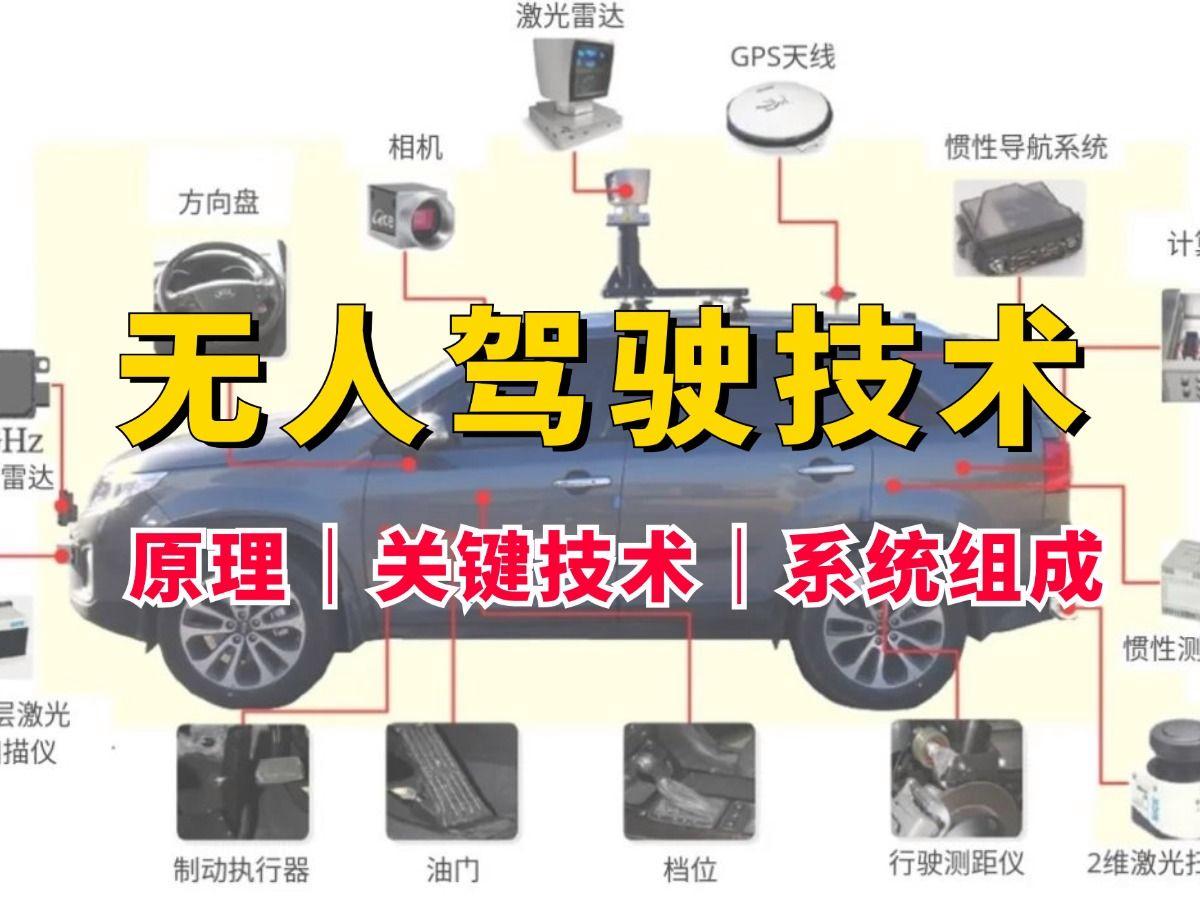
無人駕駛汽車技術(shù)圖解
二、無人駕駛汽車技術(shù)
如同其他很多事物一樣,無人駕駛實(shí)際上也有一個(gè)技術(shù)循序漸進(jìn)發(fā)展的過程。無人駕駛也需分為不同階段。
階段一:輔助駕駛階段。車道保持、自適應(yīng)巡航等輔助駕駛功能,均屬于這個(gè)階段的技術(shù),不過駕駛員仍舊是操作主體。
階段二:半自動駕駛。在這個(gè)階段中,電腦操縱下的自動駕駛已經(jīng)可以完成前往目的地的過程,其可作為備用系統(tǒng)完成行駛,但受限于法律法規(guī)等因素,其仍舊不能作為整個(gè)駕駛行為的主體存在。
階段三:全自動駕駛。技術(shù)、成本、法衡去規(guī)等因素都不再成為影響普及的因素,電腦控制的系統(tǒng)已經(jīng)作為駕駛主體而存在,駕駛員也可以隨時(shí)接管操作系統(tǒng)。
由于技術(shù)和法規(guī)等的限制,目前的無人駕駱氣車大多處于第=階段。當(dāng)前主流的無人駕駛汽車技術(shù)有激光雷達(dá)式和攝像頭+;%距雷達(dá)式兩種。
1、激光雷達(dá)式
自上世紀(jì)80年代DARPA的ALV項(xiàng)目以來,我們看到的大多數(shù)現(xiàn)代自動駕駛原型車上都布滿了傳感器,并且頭頂著一臺激光雷達(dá)。車輛使用傳感器的探測以及激光雷達(dá)的三維立體掃描來“感知”周圍的世界,而車載控制計(jì)算機(jī)則像人類大腦一樣決定需要進(jìn)行的操作。Google的無人駕駛汽車就是激光雷達(dá)應(yīng)用的典型代表。
Google算得上是最早跨界進(jìn)行自動駕駛汽車研發(fā)的互聯(lián)網(wǎng)公司,同時(shí)依托著自己獨(dú)有的地圖和大數(shù)據(jù)計(jì)算資源,在這一領(lǐng)域具有領(lǐng)先的優(yōu)勢。由于自身有著地圖和街景這樣先天的優(yōu)勢,Google自動駕駛車輛使用一臺由Velodyne公司提供的64位三維激光雷達(dá)將周圍環(huán)境繪制成一幅3D地圖,并與Google的高精度地圖相結(jié)合,利用計(jì)算機(jī)以及云端網(wǎng)絡(luò)進(jìn)行大數(shù)據(jù)處理,最終實(shí)現(xiàn)自動駕駛功能:
早期的豐田普銳斯原型車搭載了視頻攝像頭、激光雷達(dá)、位置傳感器和測距雷達(dá)幾種傳感裝置。其中視頻攝像頭用來判斷交通信號燈以及任何移動的物體;激光雷達(dá)用于形成真實(shí)道路環(huán)境的3D地圖;測距雷達(dá)用于探測車輛周圍的障礙物,一旦有物體接近,車輛將自動減速;位于左后輪處的位置傳感器用來偵測和估算車輛的側(cè)向位置偏移,以判斷車輛在地圖上的位置。
在經(jīng)過多年的試驗(yàn)后,Google推出了自己的無人駕駛原型車。這臺原型車上同樣搭載了諸多雷達(dá)及傳感器,以及聳立在車頂上的激光雷達(dá)。Google的無人駕駛汽車已經(jīng)取消了方向盤,汽車完全靠車載計(jì)算機(jī)進(jìn)行操控,是目前最接近無人駕駛概念的汽車。
2、攝像頭+測距雷達(dá)式
奔馳公司在80年代就開始研發(fā)無人駕駛技術(shù),在2013年其研發(fā)的無人駕駛汽車成功的從斯圖加特行駛到法蘭克福,行駛里程約100 km。該無人駕駛汽車是在并沒有采用激光雷達(dá),而是采用攝像機(jī)+測距雷達(dá)的組合實(shí)現(xiàn)了對周圍環(huán)境的監(jiān)測。page_break]
車頭兩側(cè)的長距雷達(dá)可以更早地發(fā)現(xiàn)遠(yuǎn)處的路口;另外的長距雷達(dá)監(jiān)控著車輛前后的交通路況;車身四角的四個(gè)短距雷達(dá)可迅速偵測到車輛周圍的事物以及其他車輛;車前風(fēng)擋處的攝像機(jī)負(fù)責(zé)識別交通標(biāo)識,后風(fēng)擋處的攝像機(jī)拍攝街景,通過與導(dǎo)航系統(tǒng)中的地形特點(diǎn)比對和辨別來確定車輛的精確位置。這輛無人駕駛汽車的立體攝像機(jī)也進(jìn)行了相應(yīng)的改進(jìn),從而可以進(jìn)一步提升探測距離。盡管是一臺真正的自動駕駛車輛,但還保留了傳統(tǒng)汽車的完整的操作方式。與Google自動駕駛車輛類似,它對于路面障礙的偵測完全來自車輛自身的傳感裝置。不過,奔馳使用了更加成熟的攝像頭組合代替了激光雷達(dá),因此在成本上更容易進(jìn)行控制,同時(shí)也不會破壞現(xiàn)有車輛的外觀質(zhì)感。
奔馳在2015年又推出了新能源自動駕駛概念車F015。奔馳F015概念車?yán)昧Ⅲw攝像頭、雷達(dá)以及超聲波傳感器來獲取車輛四周的環(huán)境數(shù)據(jù),來為自動駕駛提供大量的參考信息。高精度GPS配合三維導(dǎo)航地圖,可以確保車輛定位精度達(dá)到厘米級別。
三、無人駕駛汽車關(guān)鍵技術(shù)
無人駕駛汽車是未來汽車發(fā)展的方向,是各種頂尖科技成果為一體的智慧型汽車。就目前發(fā)展現(xiàn)狀來看,還有以下幾個(gè)方面的技術(shù)OTR需取得突破。
1、傳感器技術(shù)
現(xiàn)在無人車能出現(xiàn)很大程度上依賴傳感器的進(jìn)步。現(xiàn)在的無人駕駛汽車采用激光雷達(dá),直接感知路面狀況,用于分析計(jì)算。
2、定位
目前主要的定位系統(tǒng)中美國的GPS應(yīng)用最為廣泛,技術(shù)也較為成熟,但目前民用的GPS定位精度遠(yuǎn)達(dá)不到無人車的需求,GPS官方民用定位精度“《10 m”,更高精度的GPS基本要依靠差分完成。差分的原理很簡單:設(shè)置一個(gè)固定基站,固定基站校準(zhǔn)位置,再將信號傳遞給車載設(shè)備,車載設(shè)備在接收到基站信號和GPS信號后差分獲得。但是每一個(gè)基站的有效范圍也就30 km。于是有很多技術(shù)要解決GPS精度不足的問題,如地圖匹配。
3、避障
車輛前方有障礙,障礙物是運(yùn)動的還是靜止的,車是停下來還是繞過去。這部分主要的難度是從傳感器識別障礙,在車輛運(yùn)動的前提下,確定障礙的運(yùn)動狀態(tài)。也就是說你要在運(yùn)動的坐標(biāo)系下,計(jì)算另一個(gè)物體相對靜坐標(biāo)系的速度,并作出判斷。
4、識別
人能輕易識別出道路上的交通標(biāo)識,如限速牌、紅綠燈,同時(shí)作出相應(yīng)的反應(yīng),但這對于機(jī)器來說是一個(gè)困難的挑戰(zhàn)。目前的機(jī)器視覺技術(shù)還難以識別像樹木、行人、動物等物體。這些物體的識別都要通過視覺系統(tǒng)完成。在無人車上不但需要能在有限的時(shí)間里識別出來,并且還要考慮道路中可能有的光線變化、遮擋等問題。要完善解決這些問題,還需要等待機(jī)器視覺和圖像識別領(lǐng)域的技術(shù)突破。
5、控制
除了上面的避障以外,其他外圍機(jī)構(gòu)的改造可能會存在一些改造上的問題。如何介入轉(zhuǎn)向架、如何介入油門。這部分技術(shù)的難度較小,汽車控制技術(shù)如今已比較成熟,而無人駕駛汽車在未來基本為純電動汽車,在控制難度上將小于傳統(tǒng)的內(nèi)燃機(jī)汽車。
四、無人駕駛汽車技術(shù)原理
主要依靠車內(nèi)以計(jì)算機(jī)系統(tǒng)為主的智能駕駛儀來實(shí)現(xiàn)無人駕駛。它一般是利用車載傳感器來感知車輛周圍環(huán)境,并根據(jù)感知所獲得的道路、車輛位置和障礙物信息,控制車輛的轉(zhuǎn)向和速度,從而使車輛能夠安全、可靠地在道路上行駛 無人駕駛汽車集自動控制、體系結(jié)構(gòu)、人工智能、視覺計(jì)算等眾多技術(shù)于一體,是計(jì)算機(jī)科學(xué)、模式識別和智能控制技術(shù)高度發(fā)展的產(chǎn)物。其中制約無人駕駛汽車量產(chǎn)的原因在與激光雷達(dá)的價(jià)格以及量產(chǎn)。國外的Velodyne供貨周期在8周,國內(nèi)做的好的速騰聚創(chuàng)供貨周期在4周。
-
無人駕駛
+關(guān)注
關(guān)注
99文章
4172瀏覽量
123413 -
智能汽車
+關(guān)注
關(guān)注
30文章
3082瀏覽量
108360
原文標(biāo)題:無人駕駛汽車工作原理及關(guān)鍵技術(shù)
文章出處:【微信號:cas-ciomp,微信公眾號:中科院長春光機(jī)所】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
智行者科技無人駕駛小巴落地海南

無人駕駛技術(shù)未來在哪里?低速才是突破口

易控智駕無人駕駛技術(shù)再次取得新突破
電機(jī)系統(tǒng)節(jié)能關(guān)鍵技術(shù)及展望
無人駕駛解決方案包含哪些方面?感知、決策與控制
易控智駕發(fā)布礦山無人駕駛應(yīng)用落地成果
為什么聊自動駕駛的越來越多,聊無人駕駛的越來越少?

中國最大露天礦無人駕駛項(xiàng)目驗(yàn)收成功
易控智駕礦山無人駕駛規(guī)模化應(yīng)用兩項(xiàng)關(guān)鍵技術(shù)獲評國際領(lǐng)先
測速雷達(dá)與無人駕駛技術(shù)的結(jié)合 測速雷達(dá)故障排除技巧
UWB模塊如何助力無人駕駛技術(shù)
無線充電技術(shù)為低速無人駕駛清掃車注入無限動力
特斯拉推出無人駕駛Model Y
5G賦能車聯(lián)網(wǎng),無人駕駛引領(lǐng)未來出行






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論