 不需GPS和慣導,新型傳感器實現激光雷達SLAM
不需GPS和慣導,新型傳感器實現激光雷達SLAM

Ouster能夠以比其他產品更低的價格、更大的規模、更好的分辨率實現建圖。取代了以軟件為中心的測繪策略,避免了對高精度GPS系統、車輪里程表或昂貴陀螺儀的需求。此外,Ouster OS1多光束閃光激光雷達在同其他激光雷達產生相同數量點的情況下,價格更便宜,體積更輕便。這意味著,無論是無人機、汽車還是機器人,Ouster的地圖系統都可以快速經濟地部署在任何平臺上。
使用激光雷達傳感器制作高清地圖
激光雷達技術的最佳用途之一是測繪。有了激光雷達,就有了周圍一切的三維模型。
使用SLAM制作高清地圖
制作一張3D地圖所需要做的就是將在不同地方拍攝的激光雷達掃描序列對齊。但是,將它們排列起來的過程并不那么容易。如果激光雷達安裝在移動的平臺上,比如汽車上,便更加不容易。
過去,激光雷達制圖依賴于激光掃描儀,比如高精度GPS慣性導航系統(inertialnavigation system, INS)。利用GPS INS測量的位置和方位,可以將激光雷達點云對齊。現代GPS INS使用諸如帶有實時運動學(RTK)校正信號的地面站等技術,GPSINS系統可以將位置精確到幾厘米之內,而像手機等相對便宜的GPS精確距離可能有幾十米,可見現在GPS INS系統要好得多!但是,好的GPS INS系統非常貴,通常要數萬美元。
至于Ouster,他們不使用昂貴的GPS INS,與Ouster OS1相比,GPS INS的價格高出幾倍之多。但是,他們使用激光雷達數據本身來排列東西,這稱為同步定位和建圖(SLAM)。以前,計算機的速度還不夠快,無法使用激光雷達數據可靠地運行SLAM,但是現在,隨著SLAM技術和計算機硬件的發展,使激光雷達進行SLAM成為可能。
SLAM的原則是:對傳感器數據的最佳解釋是最簡單的解釋,對傳感器數據最簡單的解釋是發生在所有東西都對齊時。
調整點
大多數機器人算法可以歸結為兩個步驟。首先,定義一個叫做損失函數的函數,或者目標函數。第二,調整參數使函數最小化。
對于從激光雷達對準兩個點云,可以用以下方法定義目標函數。考慮將實測點云M移動到靜態場景點云S中,對于M中的每一點,找到S中最近的點,目標函數為M中每一點到對應點距離的平方和。通過旋轉和移動點云M來最小化目標函數。目標函數可以通過各種非線性最小二乘求解器最小化,如LevenbergMarquardt。在三維場景下,旋轉和平移總共有6個自由度。
在最小化損失函數之后,點云M會移動,這意味著相應的最近點可能已經改變。為了處理這個問題,簡單地重復這個過程,直到最近的點不變。該算法稱為迭代最接近點(ICP)。尋找最近的點對于移動地圖工具和機器人來說非常有效,因為它們移動平穩,所以可以對它們的位置有一個很好的猜測。所以最開始最接近的點很可能在優化之后仍然是最接近的點。
在實際操作中,lidars點并不完全直接對應。相反,激光雷達從一些潛在的物理表面掃描樣本點。Ouster OS1不是找一個最近的點,而是找幾個,然后把一個平面擬合到這些點上。然后,不是最小化兩個點之間的距離,而是最小化一個點到一個平面的距離。還有其他一些先進的方法,如廣義ICP、surfels或正態分布變換。
每個Ouster OS1都有一個內置慣性測量單元(IMU)。這是一種低成本的傳感器,類似于每一部智能手機。雖然不如高精度INS精確,但仍然非常有用。就像對齊點一樣,使用類似的策略合并IMU數據。首先,Ouster制定了一個目標函數來補償慣性測量(轉速和平動加速度)之間的差異。其次,優化狀態使目標函數最小化。
把所有這些不同的目標函數合并成一個大函數。這叫做緊密耦合。一般來說,傳感器越多效果越好。
實時性能
由于其獨特的多光束閃光激光雷達設計,Ouster OS1每秒輸出超過100萬個點,是同類產品中最高的之一。不幸的是,高分辨率帶來了很高的計算復雜度。
Ouster的SLAM算法非常著名,因為它能夠在一個典型的桌面計算機CPU上實時運行。
在不要考慮目標函數的所有點的情況下,只考慮少數最好的點。這稱為特征提取,最好的點稱為特征點。
提取特征的一種方法是在點云最平坦的部分找到點。如前所述,一個目標功能策略是點對面ICP。直觀地說,與平面匹配良好的點應該位于平面本身。他們可以通過計算一個小鄰域內的主成分分析來計算每個點周圍的平面度。然后,他們保留最好的,比方說,一千個最平坦的點,只要它們之間沒有兩個太接近,以確保他們得到一個均勻的點分布。
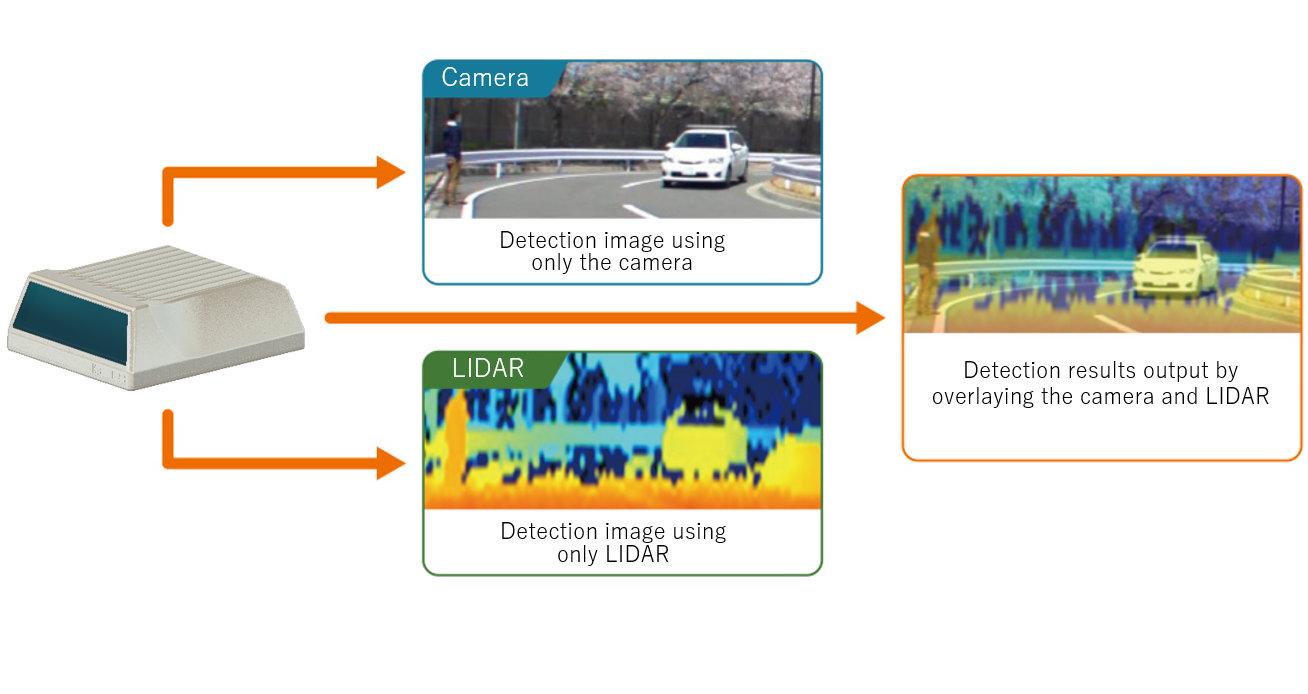
相對于幾何特征提取,激光雷達強度與基于圖像的特征提取方法相結合也是可能的。利用Ouster OS1可以捕獲二維相機圖像這一事實,使用基于深度學習的特征提取。這使得Ouster的算法更加健壯。
時間持續性
傳統的SLAM算法將一幀與下一幀對齊。然而,現實世界中的大多數傳感器并沒有以恰當的速度輸出離散幀。例如,慣性測量單元可以輸出1000赫茲的數據,但是每秒更新車輛的位置1000次是不可行的。OusterOS1以更高的速度輸出數據:64個點每秒可達到20,480次,其中每個像素列的時間戳略有不同。
以前基于lidar的SLAM方法只是使用0.1秒的數據應用幀對幀的點云對齊。在高速公路上,一輛汽車在這段時間內可能移動了3米,導致點云變形。因此,這類方法傾向于使用外部傳感器,如車輪里程表,但車輪測程遠不如激光雷達測程精確。
對于可能以不同速率運行的多個高頻傳感器,Ouster OS1采用連續時間方法進行處理。Ouster OS1沒有像同時收集所有點一樣平移和旋轉整個點云,而是將飛行器的軌跡看作是時間的連續函數。
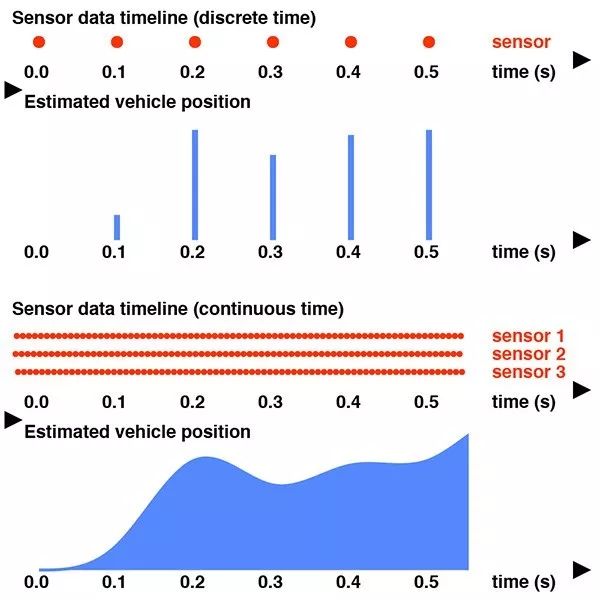
處理連續軌跡有兩種主要方法。第一,是非參數方法,如高斯過程(這里不詳細討論)。第二種更流行的方法是將軌跡參數化為樣條函數。使用這種方法,OusterOS1有一個合理數量的優化變量,每秒只有10個變量,而不是數千個。同時,解決了運動畸變問題。
對于優化問題,OusterOS1沒有將兩個幀對齊,而是考慮滑動窗口內的所有點在時間上的關系,比如0.5秒長。該窗口每次向前滑動0.1秒。對于每一個點,都找到了空間中最近的幾個點,前提是它們在時間上不是太接近。這給了Ouster OS1相同的距離集合,研究人員可以通過更新每個相關節點實現最小化。
環路閉合問題
到目前為止,已經討論了使用最近0.5秒數據的滑動窗口來估計軌跡。然而,即使是使用高精度傳感器,非常復雜的SLAM算法也會受到一些隨機不確定性的影響。因此,用這種方法確定的軌跡將不可避免地略微偏離車輛的真實軌跡。其結果是,當在一個非常大的環路中行駛時,即使車輛實際上已經回到了它開始的位置,但是車輛的估計軌跡也可能不會在相同的位置結束。這就是所謂的環路閉合問題。
環路閉合依舊是大熱的研究領域。在Ouster中,他們使用基于快速傅里葉變換的位置識別和粗對準技術,研發了一種環路閉合的最新解決方案。然后,進行大點云對齊批量優化,將多輛車的數據無縫融合到一個三維模型中。批處理優化是完全封裝的,運行在云基礎設施上,并且具有高度可伸縮性。
得到的結果是一個清晰、詳細的3D地圖,隨著越來越多的車輛在同一區域行駛,它會逐漸變得更精細、更準確。
結論
大規模的三維制圖是困難的。Ouster能夠以比其他產品更低的價格、更大的規模、更好的分辨率實現建圖。取代了以軟件為中心的測繪策略,避免了對高精度GPS系統、車輪里程表或昂貴陀螺儀的需求。此外,Ouster OS1多光束閃光激光雷達在同其他激光雷達產生相同數量點的情況下,價格更便宜,體積更輕便。這意味著,無論是無人機、汽車還是機器人,Ouster的地圖系統都可以快速經濟地部署在任何平臺上。
-
傳感器
+關注
關注
2564文章
52760瀏覽量
765112 -
激光雷達
+關注
關注
971文章
4215瀏覽量
192328
原文標題:不需GPS和慣導,新型傳感器實現激光雷達SLAM
文章出處:【微信號:IV_Technology,微信公眾號:智車科技】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
SPAD席卷車載激光雷達市場
FMCW激光雷達,工業應用新進展
SONY推出新型dTOF激光雷達(LiDAR)深度傳感器AS-DT1

激光雷達技術在自動駕駛汽車中的應用

激光雷達技術:自動駕駛的應用與發展趨勢

京瓷發布全球首款“攝像頭-激光雷達”融合傳感器
激光雷達+攝像頭融合傳感器,有沒有搞頭?
激光雷達SLAM:全面掌握同步定位與地圖構建指南

激光雷達與其他傳感器的比較
激光雷達在自動駕駛中的應用
光學雷達和激光雷達的區別是什么






 工商網監
工商網監
評論