S7-PLCSIM 和一個(gè)“真實(shí)的”自動(dòng)化控制系統(tǒng)有哪些不同?
與真實(shí)的 CPU 一樣,仿真軟件可以改變 CPU 的操作模式(RUN, RUN-P 和 STOP)。....
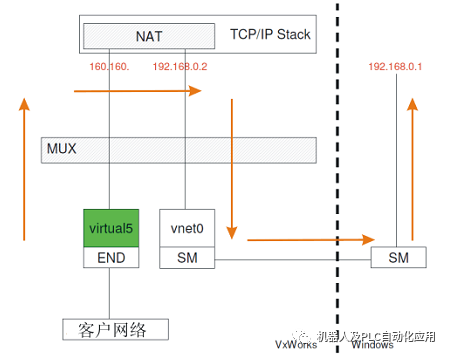
KUKA機(jī)器人KLI網(wǎng)絡(luò)分析-KLIconfig.XML
利用 RDP (遠(yuǎn)程桌面協(xié)議),可從某一工位遠(yuǎn)程訪問一臺(tái)已網(wǎng)絡(luò)連接的電腦。屏幕內(nèi)容將通過一個(gè)漸隱窗口....
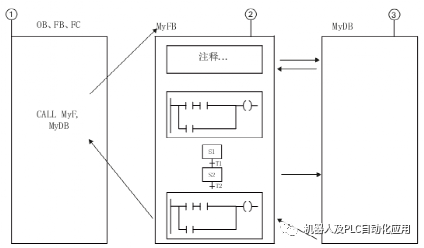
建立FC150 SCL聯(lián)系程序
-在滿足條件時(shí),要執(zhí)行的指令。如果不滿足條件,則執(zhí)行 ELSE 后編寫的指令。如果不滿足程序循環(huán)內(nèi)....
比較離線CPU與在線CPU
單擊某對(duì)象的“操作”(Action) 列,在刪除對(duì)象、不執(zhí)行任何操作或?qū)⒃搶?duì)象下載到設(shè)備這三項(xiàng)中進(jìn)行....
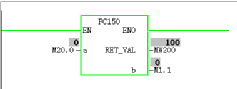
通過各種指令中的EN/ENO機(jī)制,可以檢測運(yùn)行錯(cuò)誤
為該塊互連了 EN/ENO 機(jī)制。如果執(zhí)行期間沒有任何錯(cuò)誤,則 ENO 使能輸出的信號(hào)狀態(tài)將為“1”....
新一代S7-1200的常用現(xiàn)場總線PROFINET
使用設(shè)備配置的“網(wǎng)絡(luò)視圖”(Network view) 在項(xiàng)目中的各個(gè)設(shè)備之間創(chuàng)建網(wǎng)絡(luò)連接。創(chuàng)建網(wǎng)絡(luò)....
PLC快速接通“優(yōu)先化啟動(dòng)”
即使不使用“優(yōu)先啟動(dòng)”功能,以上措施也可加速 IO 設(shè)備的啟動(dòng)過程。但如果將“優(yōu)先啟動(dòng)”功能與以....
S7-1200 CPU的操作模式和操作模式轉(zhuǎn)換
將清空非保持性存儲(chǔ)器中的內(nèi)容,同時(shí)將非保持性 DB 的內(nèi)容復(fù)位為裝載存儲(chǔ)器的初始值。同時(shí)保留保持性存....

了解現(xiàn)場總線系統(tǒng)EtherNet/IP模塊(EIP)
Ethernet/IP 實(shí)質(zhì)上就是以太網(wǎng) TCP/IP 針對(duì)工業(yè)用途的擴(kuò)展版。Ethernet/IP....

MP277面板端的設(shè)置
在彈出的Ethernet Settings中,進(jìn)入IP Address選項(xiàng)卡,選擇Specify a....
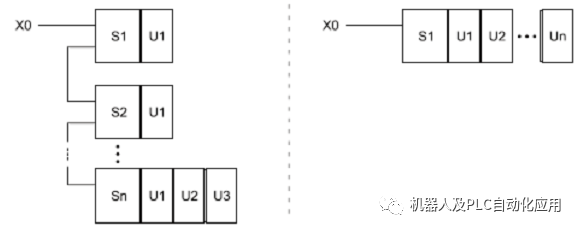
如何暫停GRAPH程序塊
Graph程序在運(yùn)行過程中,某些情況下需要將Sequence暫停去解決問題,當(dāng)問題解決后,需要接著當(dāng)....
1500之讀取組態(tài)功能
如果 CPU 和集中存在的模塊已組態(tài),并且需要在新項(xiàng)目中加載當(dāng)前的組態(tài)和參數(shù),則建議使用“上傳設(shè)備作....
快換的Profinet對(duì)接使用方式
同一個(gè)設(shè)備可以在不同的機(jī)器人上交替運(yùn)行。為此必須使用其他的 IOCTL 功能進(jìn)行解耦和耦合。如果一個(gè)....
編程窗口是可供創(chuàng)建GRAPH程序的區(qū)域
通過該類別啟用條件,可為 ProDiag 函數(shù)塊及其包含的各個(gè)類別定義一個(gè)啟用條件(全局布爾型變量)....
在線為PROFINET IO設(shè)備分配名稱
在“設(shè)備和網(wǎng)絡(luò)”(Devices & networks) 編輯器中,右鍵單擊所需的 PROFINET....
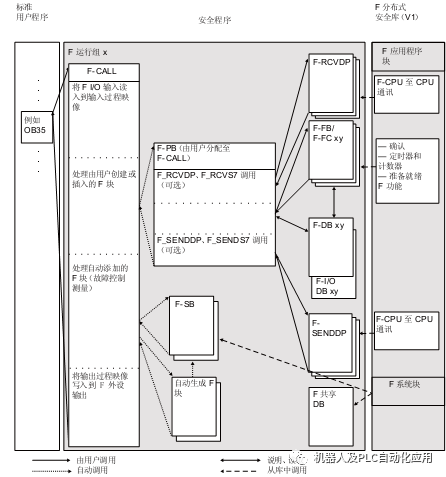
STEP7 V16安全管理編輯器
如果存在在線連接并激活了安全模式操作,則可以通過“ 禁用安全模式”(Disable safety m....
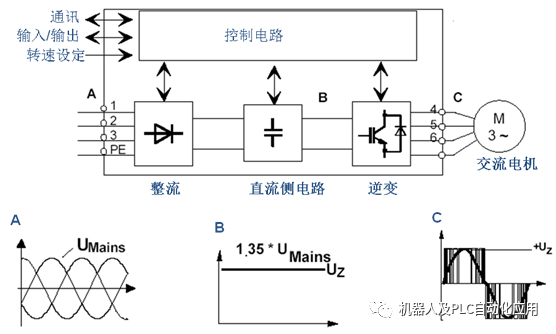
什么是制動(dòng)斬波器及制動(dòng)單元?
四象限運(yùn)行就是負(fù)載能夠反過來驅(qū)動(dòng)電動(dòng)機(jī).典型的例子就是升降機(jī)應(yīng)用,重物下放過程中,負(fù)載反過來驅(qū)動(dòng)電動(dòng)....
FB651用于多語言轉(zhuǎn)換
用于在三種語言之間切換消息視圖(數(shù)據(jù)庫視圖)和消息歸檔(數(shù)據(jù)庫歸檔)中的消息文本。在數(shù)據(jù)庫視圖和數(shù)據(jù)....
KUKA機(jī)器人固定工具的測量
用戶將工具的碰撞方向 告知機(jī)器人控制系統(tǒng)。 該碰撞方向默認(rèn)為 X 軸。其他軸的取向?qū)⒂上到y(tǒng)確定,用戶....
顯示順序塊到第幾步
在自動(dòng)模式下,輸出參數(shù)“S_NO”(數(shù)據(jù)類型“INT”)表示GRAPH FB在的當(dāng)前激活步號(hào)。此外,....
FB412- 在VASS 標(biāo)準(zhǔn)中對(duì)大氣缸的控制解析
FB 412 FB_Ventil_VEP 采用該塊,可對(duì) VEP? 氣缸、VEP 旋轉(zhuǎn)裝置 或 VE....
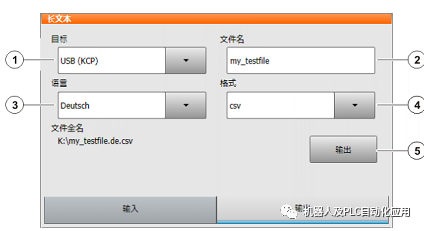
給KUKA-C4機(jī)器人導(dǎo)入長文本方法
? 如果已經(jīng)分配輸入 / 輸出端、標(biāo)志位或名稱,則可以將這些名稱 (所謂的 “長文本 ”)導(dǎo)出到一個(gè)....
如何把KUKA-C4的通過網(wǎng)絡(luò)備份到PC上?
保存在網(wǎng)絡(luò)上: 該操作步驟會(huì)在網(wǎng)絡(luò)路徑上生成一個(gè)壓縮文件。在默認(rèn)情況下,這個(gè)文件名稱與機(jī)器人名稱相同....

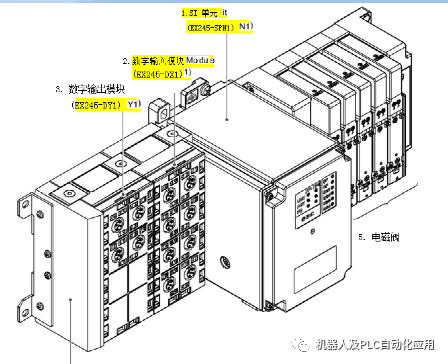
如何解決SMC閥導(dǎo)電壓不足引起的閥動(dòng)作故障?
前幾天遇到了一個(gè)SMC-SI單元控制失誤,電磁閥不得電,從先導(dǎo)閥開始就有時(shí)得電,有時(shí)不得電.測量US....





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)