西門子S1200-用簡(jiǎn)單指令創(chuàng)建復(fù)雜等式
1.使用簡(jiǎn)單指令創(chuàng)建復(fù)雜等式 在 Basic 指令樹中,展開“數(shù)學(xué)函數(shù)”(Math function....
PLC1500介質(zhì)冗余協(xié)議
介質(zhì)冗余協(xié)議? (MRP)? 說(shuō)明 介質(zhì)冗余協(xié)議? (MRP)? “MRP”進(jìn)程采用? IEC 62....
關(guān)于SCA涂膠定量機(jī)的填充超時(shí)的幾種論述
1.SCA填充時(shí)間長(zhǎng)的原因: 設(shè)備介紹: ? 原理圖: 控制器 / 功能: SCA 控制器通過(guò)連接器....
機(jī)器人控制系統(tǒng)工具坐標(biāo)的特點(diǎn)及用途
工具坐標(biāo)的特點(diǎn)及用途 機(jī)器人控制系統(tǒng)通過(guò)測(cè)量工具 (工具坐標(biāo)系)識(shí)別工具頂尖 ( TCP? - To....
PLC安全門兩區(qū)域間光電-故障控制改進(jìn)
相對(duì)1的解決方案,這個(gè)方案的安全系數(shù)更高,完全控制了2 號(hào)機(jī)器人,但當(dāng)人員跨過(guò)新加光柵后,3號(hào)/4號(hào)....
PROFIBUS,PROFINET,Ethernet三者的區(qū)別
PROFINET 是一種新的以太網(wǎng)通訊系統(tǒng),是由西門子公司和Profibus用戶協(xié)會(huì)開發(fā)。 PROF....
同步/ 異步指令之間的不同之處
而異步指令,則情況有所不同:異步指令調(diào)用完成時(shí),異步指令的執(zhí)行不一定完成。這也就意味著,異步指令的執(zhí)....
西門子汽車廠工業(yè)自動(dòng)化的幾種基礎(chǔ)功能
生產(chǎn)過(guò)程結(jié)束后,系統(tǒng)將保持其基本位置。沒有給出用于拆卸組件的釋放裝置(滑軌保留在站中),并且站的啟動(dòng)....
機(jī)器人關(guān)機(jī)后WINCC診斷畫面沒有顯示鈍化!
機(jī)器人關(guān)機(jī)后沒有急停反饋故障,原因是機(jī)器人在操作選擇關(guān)機(jī)時(shí),如果網(wǎng)絡(luò)還處于連接狀態(tài)時(shí)會(huì)出現(xiàn)鈍化,但此....

PLC1500地址分配
STEP 7 將自動(dòng)指定一個(gè)硬件標(biāo)識(shí)符(HW 標(biāo)識(shí)符),用于標(biāo)識(shí)和尋址模塊和子模塊。例如,在診斷....
SMC-PNEX 245模塊故障分析
在機(jī)器人沒有給上”使能”US2時(shí)閥導(dǎo)的輸入模塊無(wú)故障,顯示正常。給上使能后輸入模塊的輸入點(diǎn)都無(wú)電,相....
IBS-BG4程序的項(xiàng)目結(jié)構(gòu)
一個(gè)項(xiàng)目可能包含多個(gè)PLC / PC。 一個(gè)PLC / PC系統(tǒng)中可以安裝多個(gè)控制器板。 一個(gè)控制器....

VASS標(biāo)準(zhǔn)里的AAutoVR自動(dòng)釋放設(shè)備
為了確保關(guān)閉在手動(dòng)模式下打開的上一節(jié)的夾具,夾具必須再次關(guān)閉,并帶有節(jié)完成消息并且AutoVR = ....

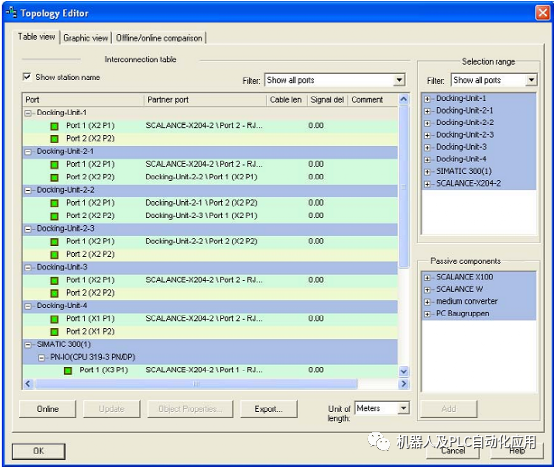
博途插入并組態(tài)PLC
圖形區(qū)域顯示與網(wǎng)絡(luò)相關(guān)的設(shè)備、網(wǎng)絡(luò)、連接和關(guān)系。 在圖形區(qū)域中,可以插入硬件目錄 (7) 中的設(shè)....
快換頭抓手的”SMC模塊無(wú)電源斷網(wǎng)故障”處理分析
分析SMC電源故障:無(wú)電源掉網(wǎng),說(shuō)明US1無(wú)電,或者欠電.測(cè)量抓手SMC入端的US1電壓,電壓值為2....
KUKA C1-C2機(jī)器人工作原理
所有工作程序都能夠在降低的速度條件下以手動(dòng)的,測(cè)試運(yùn)行方式來(lái)完成動(dòng)作.工作程序只有在按住”START....
一個(gè)SMC-SI單元控制失誤
現(xiàn)場(chǎng)的SMC-SI-EX245單元使用10個(gè)閥導(dǎo),首先是先導(dǎo)閥壓力故障,將先導(dǎo)閥壓力反饋短接后變成中....
VASS06版使用的CPU為: CPU 1517F
為此,請(qǐng)打開提供的示例項(xiàng)目;TIA將安裝那些尚未安裝在 TIA 中的 GSD 文件。也可以通過(guò)菜單項(xiàng)....
點(diǎn)焊機(jī)器人是大眾標(biāo)準(zhǔn)中最常使用的基準(zhǔn)工藝控制
對(duì)于帶有補(bǔ)償系統(tǒng)的焊槍,補(bǔ)償值以二進(jìn)制形式傳輸?shù)胶笜專⑶冶仨氃诿總€(gè)焊接點(diǎn)進(jìn)行編程。夾緊補(bǔ)償?shù)闹祽?yīng)這....
CPU 317-2PNDP組態(tài)PROFINET接口
單擊“Properties”(屬性)。在“屬性”對(duì)話框中設(shè)置“分配項(xiàng)目特定 IP 地址”選項(xiàng)。單擊....

KUKA機(jī)器人KLI網(wǎng)絡(luò)分析-KLIconfig.XML
KLI 始終與 VxWorks 側(cè)進(jìn)行通訊。 與 Windows 只可通過(guò)選定的端口才能連接,具體端....

借助工業(yè)以太網(wǎng)進(jìn)行電源管理
借助CapCtrl.xml 進(jìn)行的工業(yè)以太網(wǎng)接口配置不是PROFIenergy的函數(shù)并且必須分開考慮....
KUKA的PROFINET之WakeOnLAN
要實(shí)現(xiàn) WOL 網(wǎng)絡(luò)喚醒 (遠(yuǎn)程開機(jī)/關(guān)機(jī)),首先需要開啟電腦/設(shè)備的 WOL 功能,后面我們會(huì)有怎....
PROFINET IO中的診斷機(jī)制
當(dāng)檢測(cè)到通道故障(例如,模擬輸入處短路)時(shí),IO 設(shè)備將向 CPU 輸出診斷中斷。操作系統(tǒng)通過(guò)調(diào)用診....

S7-1200的SIMATIC存儲(chǔ)卡
如果用作程序卡,則可以在存儲(chǔ)卡上裝載用戶程序。這種情況下,存儲(chǔ)卡將替代設(shè)備的內(nèi)部裝載存儲(chǔ)器,且內(nèi)部裝....
KUKAC4機(jī)器人使用的Dual NIC網(wǎng)卡
每塊網(wǎng)卡都擁有全球獨(dú)一無(wú)二的識(shí)別碼,即 MAC 地址 MAC 地址。該地址可從網(wǎng)卡上直接讀取,也可利....
解決滾床報(bào)完成信號(hào)沒清故障問(wèn)題
通過(guò)跟蹤檢測(cè),發(fā)現(xiàn)機(jī)器人用總信號(hào)時(shí),當(dāng)機(jī)器人在銑削時(shí),一旦連續(xù)工作,進(jìn)車時(shí),就會(huì)出機(jī)器人的總完成信號(hào)....





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)