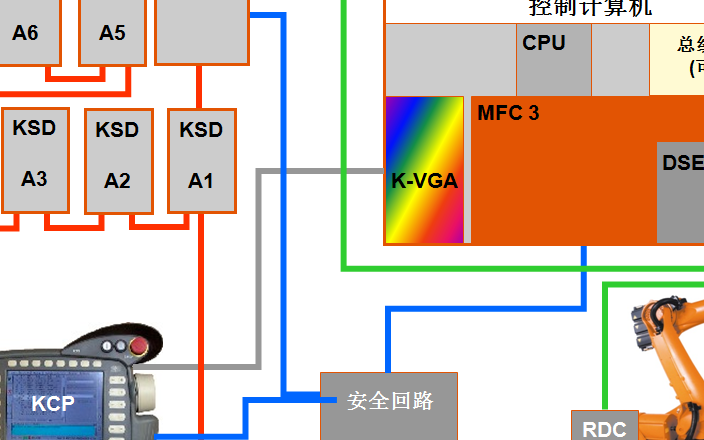
KUKA C4機器人的軌跡BASE與TOOL坐標
在工業機器人的操作、編程和調試時坐標系具有重要的意義。在機器人控制系統中定義了下列坐標系: ROBR....
機器人及PLC自動化應用
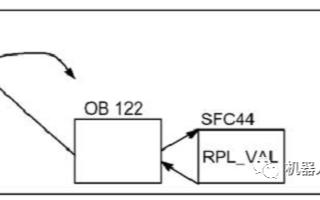
PROFINET IO? 中的診斷 PROFINET IO? 中的診斷的基本原理: 基本概念 同時發....
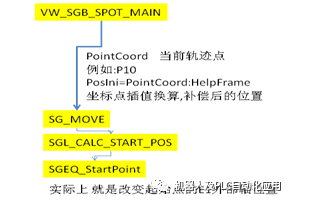
大眾標準里機器人程序中P值的設置被存在了哪里
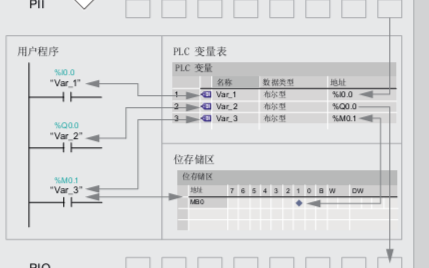
在大眾標準機器人程序中我們很多時候都要設置P,或者使用P,那它被存到了那里呢??? 例如:? ;FO....
CPU 317-2 PNDP組態PROFINET接口
第 1 步:設置 PG/PC ?接口 1. 選擇“開始 SIMATIC STEP 7 自定義 PG/....
KUKA-C4機器人如何導出/導入長文本
? 如果已經分配輸入 / 輸出端、標志位或名稱,則可以將這些名稱 (所謂的 “長文本 ”)導出到一個....

KUKAC2機器人程序備份如何操作
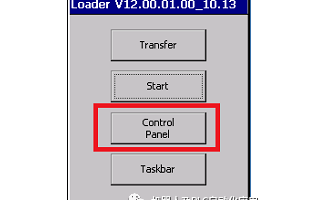
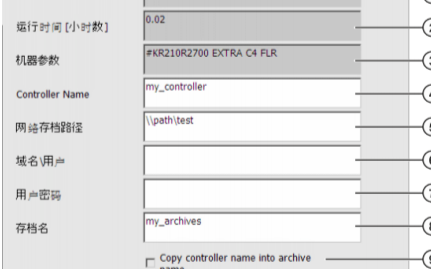
最近出了C4機器人我又撿起了C2機器人的維修工作,由于本身對C2的接觸時間不久就開始學習了C4機器人....
史陶比爾換槍盤-MPS常見故障及處理辦法
1.鎖緊傳感器無信號 現象: 1,E540報錯 2,機器人無法檢測鎖緊位置傳感器(locked傳感器....
大眾VASS05機器人焊接程序標準中焊接與服務有什么區別
Tech_ EZSP Zange = Nr1與Tech_ EZSP Zange = Nr1 Serv....

Python也太強大了吧
“Python除了不能幫你生孩子,什么都能做!” ? Python厲害的事真的太多太多了,各種千奇百....
SICK光電硬件拆卸
SICK光電硬件大拆卸 ? 近日在現場遇到SICK光電報E3故障,SICK接口模塊故障.我們將通訊模....
博途VASS06的CPU設置要求
VASS06版使用的CPU為: CPU 1517F CPU: 為了實現 VASS 標準中的預期功能范....

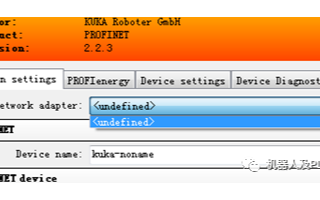
KUKAC4-PN網絡模塊如何修復
昨天一個8入8出的機器人1軸模塊出現指示燈不亮的地問題,機器人提示:A1軸模塊掉網. 對它進行拆解檢....
PLC自動工位所使用的條形光柵的解法與調試
? PLC自動工位所使用的條形光柵是我們經常使用的一種人工上件的安全控制設備. 人員進入傳輸貨架卸垛....
基于S7-300400 CPU集成PN接口的Modbus TCP在TIA Portal的使用入門教程
基于S7-300400 CPU集成PN接口的Modbus TCP在TIA Portal的使用入門. ....
基于TIA Portal下的TCP通訊的方法詳解
基于TIA Portal下的TCP通訊的方法 PLC與PLC通過TCP連接控制!對于現場經費需要優化....
如何將 PROFINET IO 系統的用戶數據交換組態 IRT 通訊?
組態 PROFINET IO 系統的 IRT 通訊 通過 域管理 (Domain managemen....
使用FB65但RFID與PC的連接DB用法的區別
同樣是使用使用FB65但RFID與PC的連接DB用法有一定的區別: 首先說一下什么是FB65: 通過....
西門子PLC如何對F系統進行編程
F-CPU 中的用戶程序通常由標準用戶程序和安全程序組成。標準用戶程序是在 STEP 7 中使用標....





 工商網監
工商網監