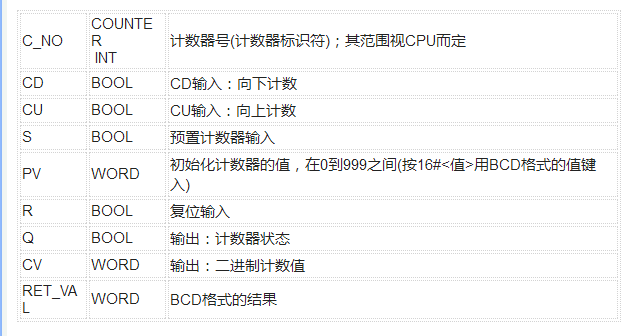
可使用“分配參數并加計數”指令遞增計數器值。當 CU 參數的信號狀態從“0”變為“1”(信號上升沿)....
WAITFOR SPS_FERTIG -中斷預執行指令,等待SPS指令結束,SPS指令結束才能程序....
如果在定時器運行期間復位(R)輸入從"0"變為"1",則定時器復位。當前時間和時間基準被設置為零。

并且已經獲得下面的信號 : 熱槽溫度,控制柜內部溫度,控制柜風扇溫度,IC 電壓。
RF180C 上最多可同時操作兩個閱讀器。 您可以將一條命令同時發給兩個閱讀器(在 SIMATIC ....
IO 控制器與 IO 設備之間的數據交換通過兩條不同路徑發送(環拓撲)。冗余管理器監視冗余介質上的傳....
電源電壓不正確的軟件可能會損壞組件(使用時選擇電壓要和機器人復制MADA數據時相一致)

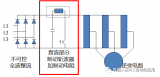
主回路輸入三相交流電壓后,由三相全波橋式整流,再經電容濾波后得到500V左右的直流電壓,最后由SPW....
Python在資源收集、數據分析、自動化辦公等領域表現很突出,可以幫我們執行一些重復、低效的工作,讓....

用于氣伺服焊鉗和其他軟件控制電伺服焊鉗或其他伺服設備(由機器人以外設備控制伺服電機設備)例如:伺服鉚....

SIMATIC ProDiag是用于機器和工廠診斷的完全集成的TIA解決方案。它節省了在工程階段在C....

每個機器人的核心都是它的控制器--KUKA機器人在這方面得到了令人印象深刻的更新:未來兼容的硬件和智....
在設備名稱中,兩個句點之間的字符串構成一個標簽。例如,標簽可以是".Machine-A."。

用內六角工具或一字螺絲刀松開“鎖緊傳感器(Lockedsensor)”固定螺絲,在槽內上下移動至合適....
根據總線節點CPX-FB33/FB34的硬件版本(在模塊的背部標簽上有標注),選定CPX 圖標,將它....
我第一次接觸SiVArc時在奧迪Q3和A6車型,還有后來的Q5,以及VASS標準,我覺得在畫面生成方....

機器人程序備份路徑分為A盤 :intern ,另外一個是E盤:extern。兩者的的區分在于先插入系....

平衡缸回位信號: 焊接過程時如果平衡系統沒有問題時,平衡缸回位反饋E719應該是沒有反饋的,而當進行....
使用“條件執行”指令,可以根據條件控制程序流的分支。該條件是結果為布爾值(TRUE 或 FALSE)....

Tech_ Buersten Referenzfahrt - [%] M2 Rechtslauf -....
FB41用于通過使用連續的變量輸出在SIMATIC S7控制系統中實現技術過程控制。除了設定點操作和....

必須正確設置本節中的參數,才能使Interbus連接正常運行。插圖中指定的值對應于默認設置,該設置在....

Technology 技術型:使用MOVI-PLC,依據IEC61131標準進行自由編程,MOVIT....
E718 夾緊力到位,A718夾緊,F312在旋轉測試時, E834銑刀轉, A834銑刀電機轉,F....

在IO設備的端口屬性中,選擇一個具體的傳送介質(例如,100 Mbps全雙工的TP/ITP),然后選....

開啟力監控后,力矩監控值對之后的軌跡點都有效果, 力矩監控變量$TORQMON會始終影響后面的軌跡點....

分析SMC電源故障:無電源掉網,說明US1無電,或者欠電.測量抓手SMC入端的US1電壓,電壓值為2....
采用該模塊,可以利用最多 8 個末位位置反饋信號對提升和傾斜氣缸(臂長超過300 mm )進行控制。....

通過TCP/UDP/IP在標準通道上發送非苛求時間的數據,例如:參數、組態數據和互連信息。這滿足自動....
同一工位的機器人,在工作過程中,需要進入到同一個區域,但在進入的先后次序無嚴格的限定,一臺機器人(M....






 工商網監
工商網監