

大眾USER(技術(shù)包)的整體調(diào)用和結(jié)構(gòu)!
VW_USR是德國大眾獨(dú)有技術(shù)包程序,主要是對不同的機(jī)器人附屬設(shè)備通過機(jī)器人高級語言進(jìn)行控制.由于大....

KUKAC 4機(jī)器人柜內(nèi)模塊KPP或KSP分配安全地址
為此標(biāo)出控制系統(tǒng),并通過鼠標(biāo)右鍵打開快捷方式菜單。點(diǎn)擊菜單項(xiàng)“設(shè)為激活的控制器”。項(xiàng)目結(jié)構(gòu)將擴(kuò)展添加....

KUKA工具之CZ電伺服鉚鉗ECKOLD技術(shù)
通過ECKOLD軟件(通過客戶提供的系統(tǒng),在現(xiàn)有工業(yè)PC上)進(jìn)行過程監(jiān)視和控制的可視化.
KUKA-WorkVisual-導(dǎo)出/導(dǎo)入PROFINET節(jié)點(diǎn)配置
如果項(xiàng)目中已經(jīng)有一個 PROFINET 配置,則該配置在導(dǎo)入時被覆蓋,并且所有邏輯映射全部被刪除!不....

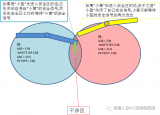
VASS標(biāo)準(zhǔn)PLC對機(jī)器人之間互鎖信號的控制
如果”小黃”后進(jìn)入安全區(qū)的話,由于之前”小藍(lán)”關(guān)閉了自己安全信號,小黃只能等待小藍(lán)的安全信號的再次發(fā)....

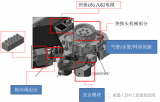
生降位的電機(jī)控制-SEW-MOVIPRO
?X5520-STO安全點(diǎn)直接控制變頻器的功率單元以及抱閘的控制單元,接通后使抱閘和電機(jī)可以控制。
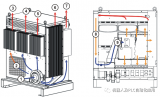
KUKAC4機(jī)器人電機(jī)風(fēng)扇故障,使得機(jī)器人沒有好使能.
箱柜冷卻裝置包含兩條冷卻循環(huán)回路。裝有控制、功率電子元器件的箱內(nèi)范圍通過一個換熱器進(jìn)行散熱。在箱柜的....
$DSECHANNEL數(shù)字伺服系統(tǒng)軸通道的分配
可以在此處配置以下機(jī)器數(shù)據(jù):1.外部軸數(shù)或運(yùn)動系統(tǒng)中的軸數(shù)
2.剎車控制方式


涂膠設(shè)備原理及KUKA機(jī)器人控制分析+MAKRO
無論是DURR還是SCA的涂膠設(shè)備,他們在關(guān)機(jī)斷電后都要進(jìn)行自動尋參,這是因?yàn)樗麄兊亩繖C(jī)電機(jī)使用了....

KUKAC4機(jī)器人電機(jī)風(fēng)扇故障,使得機(jī)器人沒有好使能.
箱柜冷卻裝置包含兩條冷卻循環(huán)回路。裝有控制、功率電子元器件的箱內(nèi)范圍通過一個換熱器進(jìn)行散熱。在箱柜的....
KUKA _SafeRobot->SafeOperation檢查參考
如果當(dāng)前位置和參考位置之間的偏差太大,則調(diào)整參考失敗。機(jī)器人以安全停止1停止,并且只能在操作模式T1....

KUKA KRC4機(jī)器人初次通電
機(jī)器人第一次上電,示教器有時會出現(xiàn)如下界面,屆時請耐心等待機(jī)器人最后的上電完成,進(jìn)入到KSS系統(tǒng)里,....

C4機(jī)器人與PLC的通信IO域更改擴(kuò)展
在全自動化生產(chǎn)線上,必須對過程進(jìn)行監(jiān)控和協(xié)調(diào),例如狀態(tài)監(jiān)測和過程控制。這個任務(wù)通常由 PLC 來承擔(dān)....
KUKA8.2系統(tǒng)下C4機(jī)器人虛擬外部軸E1的設(shè)置深層分析
與它相配合還要有相對應(yīng)的USER用戶程序組建,只要是標(biāo)準(zhǔn)用戶程就行,不能和激光焊的標(biāo)準(zhǔn)組件混用。


變頻器電路由主電路和控制電路組成
1、交-直-交變頻器是現(xiàn)在最常使用的變頻器,按直流環(huán)節(jié)的儲能方式分為電壓型變頻器、電流型變頻器,按輸....
限制電動機(jī)啟動電流的要求是什么?
當(dāng)負(fù)載對電動機(jī)啟動力矩?zé)o嚴(yán)格要求又要限制電動機(jī)啟動電流,電機(jī)滿足380V/Δ接線條件,電機(jī)正常運(yùn)行時....
關(guān)于EtherCAT的性能
1000 個I/O 的更新時間只需30 μs,其中還包括I/O 周期時間。單個以太網(wǎng)幀最多可進(jìn)行14....
編碼器是把角位移或直線位移轉(zhuǎn)換成電信號的一種裝置
編碼器是把角位移或直線位移轉(zhuǎn)換成電信號的一種裝置。前者稱為碼盤,后者稱碼尺.按照讀出方式編碼器可以分....
機(jī)器人的電機(jī)位置測量元件
轉(zhuǎn)子 (3)通過旋轉(zhuǎn)式變壓器 (2)接受一個電壓裝置 (1)的供電 (頻率 = 8kHz)。在定子線....
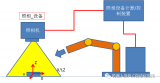
機(jī)器人使用CMT焊接的標(biāo)準(zhǔn)控制應(yīng)用分析
焊接開始,焊槍伺服電機(jī)驅(qū)動,焊絲與板材電弧引燃,焊絲融化融滴滴進(jìn)熔池,當(dāng)數(shù)字化的控制監(jiān)測到一個短路信....

矢量發(fā)動機(jī)機(jī)械科技機(jī)械原理
使用推力矢量技術(shù)的飛機(jī)不僅其機(jī)動性大大提高,而且還具有前所未有的短距起落能力,這是因?yàn)槭褂猛屏κ噶考?...

KUKA機(jī)器人視覺抓取的工作原理及Ethernet KRL軟件控制講解
BASE坐標(biāo)系: 可根據(jù)需要定義用戶坐標(biāo)系。 當(dāng)機(jī)器人配備多個工作臺時,選擇用戶坐標(biāo)系可使操作更為簡....





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)