KUKA程序中"DEF "與" DEFFCT" 的區別
局部子程序允許多次調用
局部程序名稱需要使用括號
運行完畢局部子程序后,跳回到調出子程序后面的第....
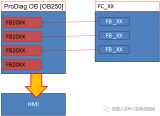
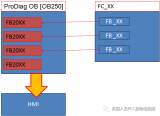
KUKA機器人練習:制作一條報警信息!
#VALUE : 參數直接以傳遞的形式代入信息文本中 (即作為字符串、INT、REAL 或 BOOL....

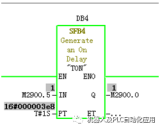
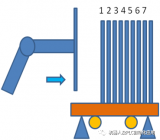
FB 464控制卷簾門
為了實現無 "SxxV" 運行,必須設置"Cfg Bit 00",以確保錯誤確認的正確完成。卷簾門....
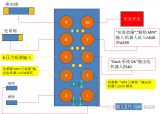
抓手USER:TECH2_ Koll_Ueb 過載報警設置
WHILE((PAR4<1) OR (PAR4>40)) --檢查P4的補償值-是否在(1-40)之間
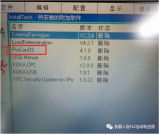
KUKA-8.3系統電伺服焊鉗的更換電極測量與銑削后測量的過程分析
更換電極時測量和銑削后測量使用的同一USER程序,只是功能選項不同。
KUKA CELL()程序的分析解讀
CELL的功能:只能檢測是否在原點,PLC給入的程序號是否正確,打開FOLGEN程序。
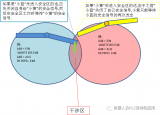
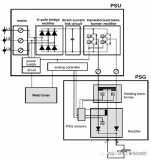
控制系統PC機中的安全控制系統
用于訪問防護區的輸入端。在自動模式下,信號觸發 Stop 1。即使任何一扇防護門關上,機器人也不允許....


C4機器人與PLC的通信IO域更改擴展
數字輸出先在PLC 端被寫入 輸出存儲器,然后才被傳輸。PLC的數字輸出在KRC4 端被存放在輸入....






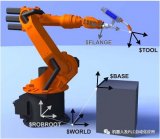
KUKA機器人如何聲明變量
變量聲明需要關鍵詞 DECL,對四種簡單數據類型關鍵詞 DECL 可省略[1.整數 (INT) 2.....

KUKA機器人電伺服焊鉗力的建立過程
SERVOZANGE 1 Schweissen Programmnummer= 99 Punktnu....





 工商網監
工商網監