 電子發(fā)燒友App
電子發(fā)燒友App


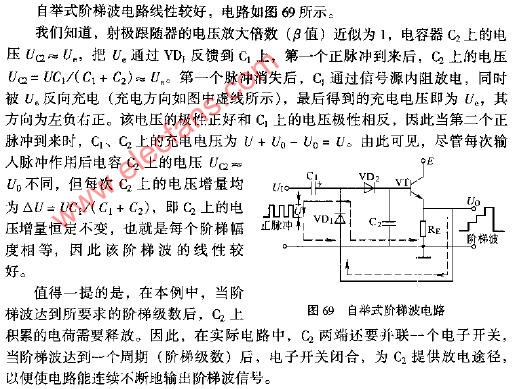
自舉電路是指用電容器使放大電路中某部分產(chǎn)生自舉現(xiàn)象,從而達到提高電路的增益和擴展電路的輸出動態(tài)范圍,使電容放電電壓和電源電壓疊加,從而使電壓升高.有的電路升高的電壓能達到數(shù)倍電源電壓。
工作原理
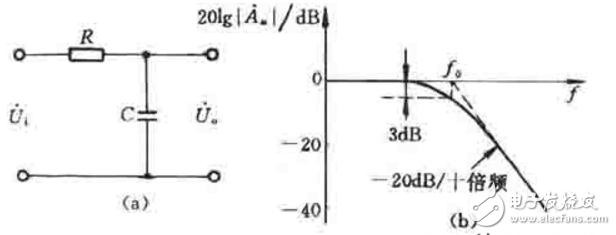
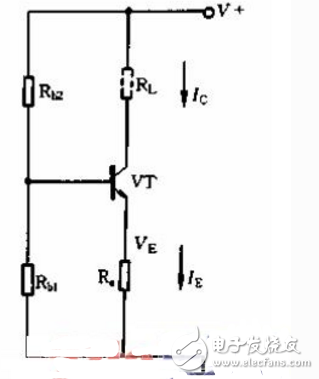
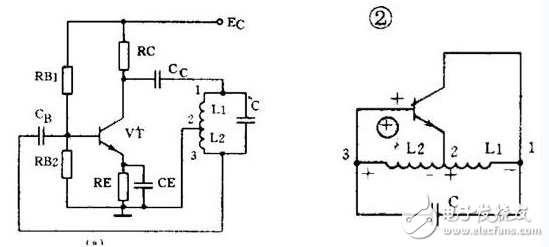
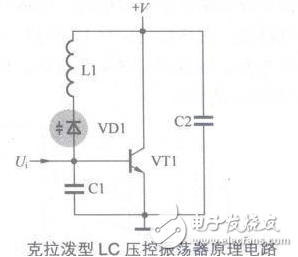
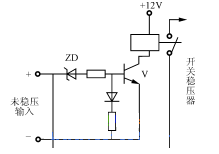
圖1是一個簡單的電路,由歐姆定律可知,電阻R上流過電流為I=Va/R,如果我們在圖1這個電路的基礎(chǔ)上增加一級射極跟隨電路,如圖2所示,由于射極跟隨電路的電壓放大倍數(shù)小于1,但又非常接近于1,假設(shè)射極跟隨電路的電壓放大倍數(shù)為0.95,則三極管的Ve=0.95VB,由于電容C對交流而言,相當(dāng)于短路,所以B點的電壓VB等于發(fā)射極電壓,即VB=VE,而點A的電壓就是VB,所以此時流過電阻R的電流為:
從以上可見,由于電容C的作用,流過電阻R的電流僅為原來的1/20.對局部電路而言,也就是相當(dāng)于大怒R增大了20倍,從而實現(xiàn)了電路參數(shù)的自舉。所以能自舉,是由于電容C的加入。結(jié)論就是:電路的自舉就是利用電路中不同節(jié)點的電位差,通過電容的反饋作用來改變電路某一點的點位,使電路中的電位發(fā)生改變,從而減少流過電阻中的電流,使得電阻兩端的等效電阻值變大,達到提高電路增益的目的,若從反饋的角度來看自舉,實質(zhì)上是一種特殊形式的正反饋。
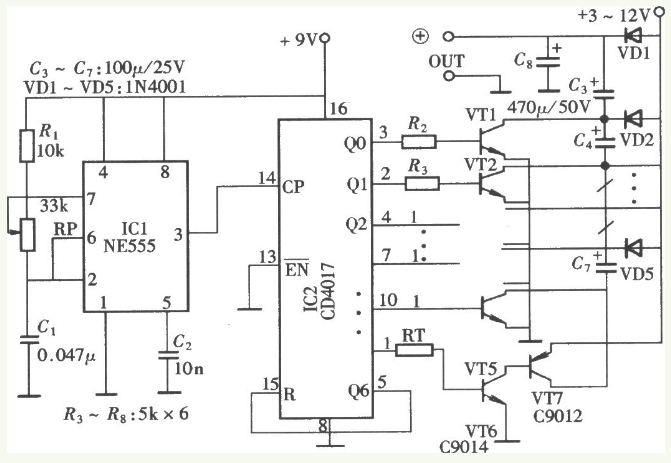
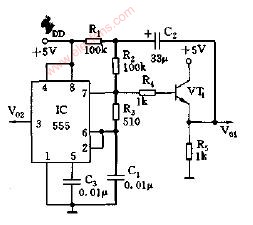
電容自舉電路電路圖(一)
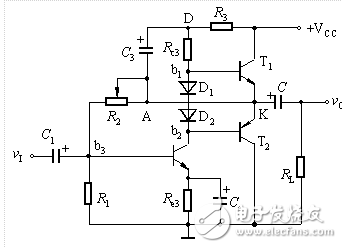
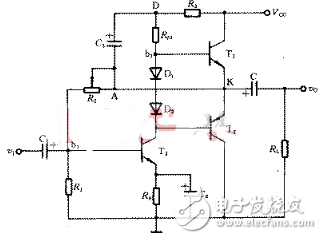
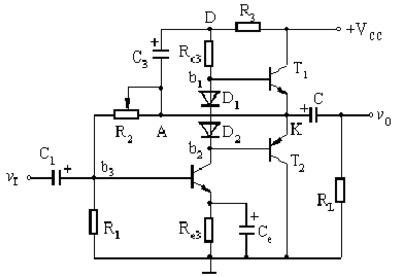
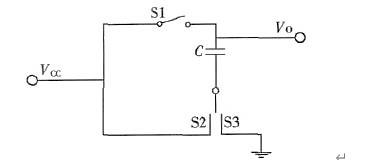
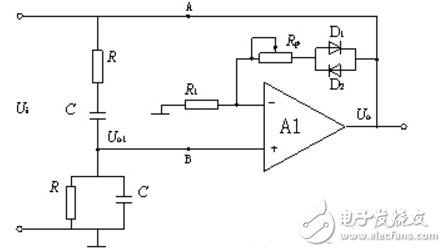
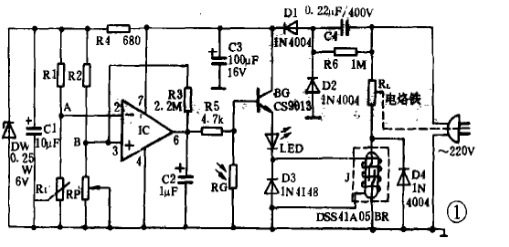
在圖中,當(dāng)vI =0時,vD=VD=VCC-Ic3R3 ,而vK=VK=VCC/2,因此電容C3兩端電壓被充電到VC3=VCC/2-Ic3R3。
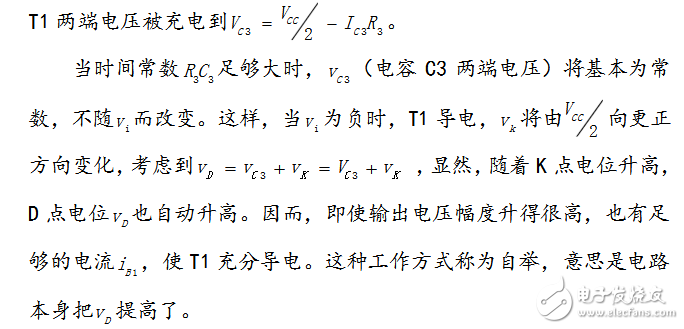
當(dāng)時間常數(shù)R3C3足夠大時,vC3(電容C3兩端電壓)將基本為常數(shù)(vC3 ?VC3),不隨vi而改變。這樣,當(dāng)vi為負時,T1導(dǎo)電,vK將由VCC/2向更正方向變化,考慮到vD=vC3+vK=VC3+vK ,顯然,隨著K點電位升高,D點電位vD也自動升高。因而,即使輸出電壓幅度升得很高,也有足夠的電流iB1,使T1充分導(dǎo)電。這種工作方式稱為自舉,意思是電路本身把vD提高了。
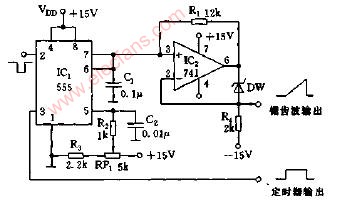
電容自舉電路電路圖(二)
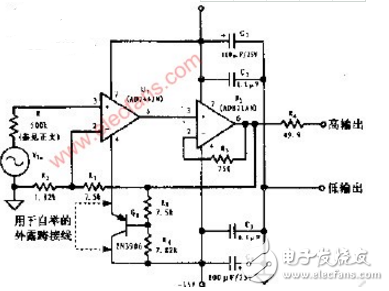
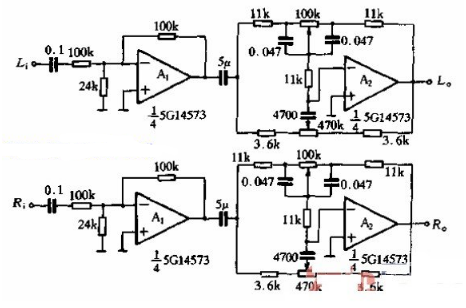
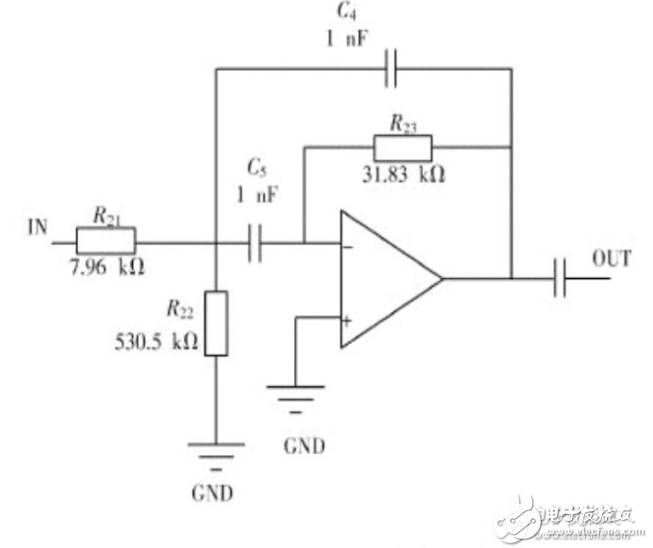
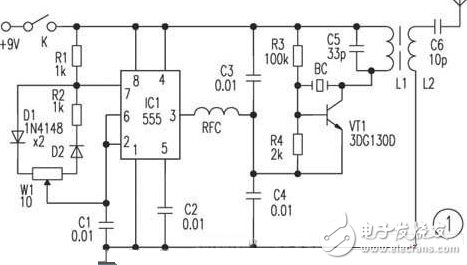
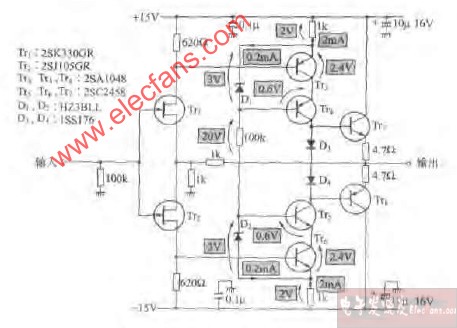
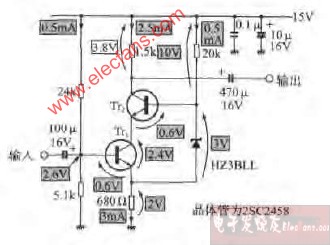
對JFET放大器的襯底進行自舉的減小又JFET輸入電容的非線性引起的失真,在這個電路中,第二反饋分壓器使U1的襯底自舉,當(dāng)R1=500KM(源阻抗)時,在10KHz上的總諧波失真(THD)減小了個數(shù)量級。
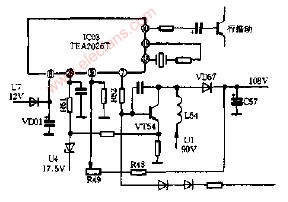
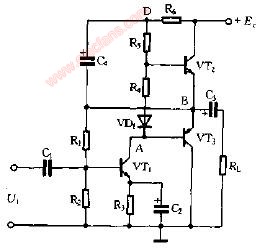
電容自舉電路電路圖(三)
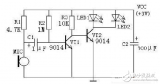
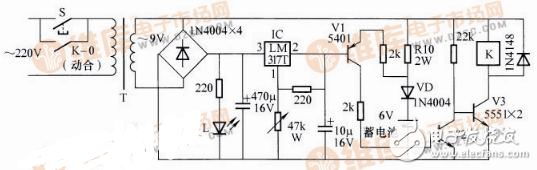
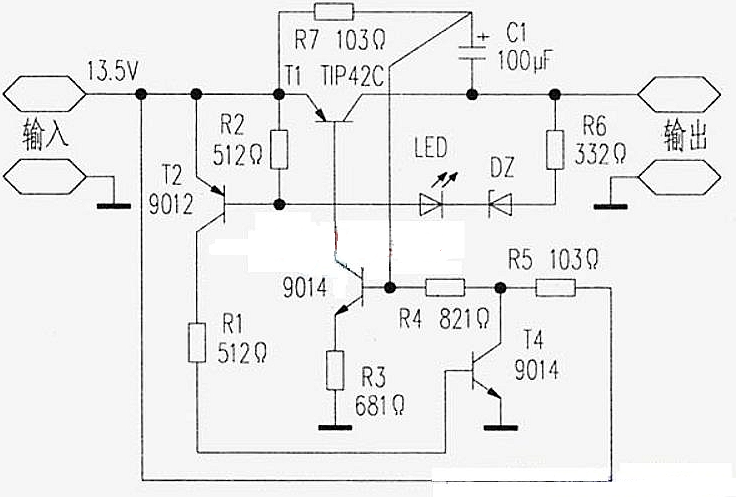
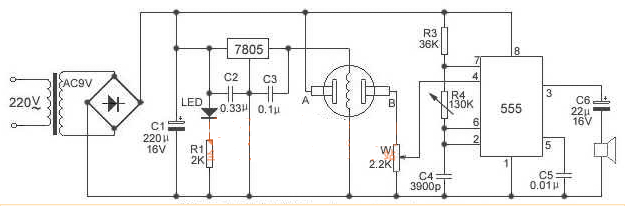
OTL功率放大器中要設(shè)自舉電路,圖3所示是自舉電路。電路中的C1,R1和R2構(gòu)成自舉電路。C1為自舉電容,R1O 隔離電阻,R2將自舉電壓加到VT2基極。B140-13-F VT1集電極信號為正半周期間VT2導(dǎo)通、放大,當(dāng)輸入VT2基極的信號比較大時,VT2基極信號電壓大,由于VT2發(fā)射極電壓跟隨基極電壓,VT2發(fā)射極電壓接近直流工作電壓+V,造成VT2集電極與發(fā)射極之間的直流工作電壓減小,VT2容易進入飽和區(qū),使三極管基極電流不能有效地控制集電極電流。
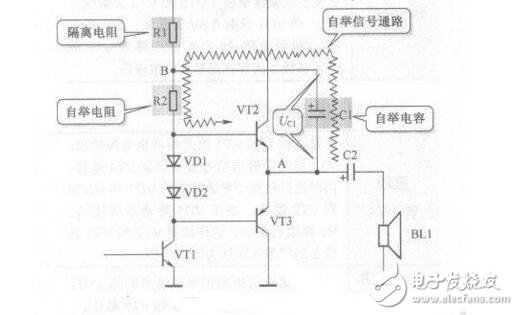
圖3
(1)換句話講,三極管集電極與發(fā)射極之間直流工作電壓減小后,基極電流增大許多才能使三極管集電極電流有一些增大,顯然使正半周大信號輸出受到抑制,造成正半周大信號的輸出不足,必須采取自舉電路來加以補償。自舉電路實質(zhì)是在放大器的局部引入正反饋。
(2)自舉電路靜態(tài)分析。靜態(tài)時,直流工作電壓+V經(jīng)Rl對Cl充電,使Cl上充有上正下負的電壓UC1,這樣電路中B點的直流電壓等于A點的直流電壓加上UC1,B點的直流電壓高于A點電壓。
(3)自舉過程分析。加入自舉電路后,由于Cl容量很大,它的放電回路時間常數(shù)很大,使Cl上的電壓Uci基本不變。正半周大信號出現(xiàn)時,A患電壓升高導(dǎo)致B點電壓也隨之升高。電路中,B點升高的電壓經(jīng)R2加到VT2基極,使VT2基極上的信號電壓更高(正反饋過程),有更大的基極信號電流激勵VT2,使VT2發(fā)射極輸出信號電流更大,補償VT2集電極與發(fā)射極之間直流工作電壓下降而造成的輸出信號電流不足。
(4)隔離電阻作用。自舉電路中,Rl用來將B點的直流電壓與直流工作電壓+V隔離,使B點直流電壓有可能在某瞬間超過+ Vo當(dāng)VT2中正半周信號幅度很大時,A點電壓接近+V,B點直流電壓更大,并超過+V,此時B點電流經(jīng)Rl流向電源+V(對直流電源+V充電)。如果沒有電阻Rl的隔離作用(分析視Rl短接),則B點直流電壓最高為+V,而不可能超過+V,此時無自舉作用。可見設(shè)置隔離電阻Rl后,大信號時的自舉作用更好。
電容自舉電路電路圖(四)
(1)存在問題
上述情況是理想的。實際上,圖1的輸出電壓幅值達不到Vom= Vom/2,這是因為當(dāng)vi為負半周時,T1導(dǎo)電,因而iB1增加,由于RC3上的壓降和VBE1的存在,當(dāng)K點電位向+VCC接近時,T1的基流將受限制而不能增加很多,因而也就限制了T1輸向負載的電流,使RL兩端得不到足夠的電壓變化量,致使Vom明顯小于VCC/2。
(2)改進辦法
如果把圖1中D點電位升高, 使VD>+VCC, 例如將圖中D點與+VCC的連線切斷,VD由另一電源供給,則問題即可以得到解決。通常的辦法是在電路中引人R3、C3等元件組成的所謂自舉電路,如圖1所示。
(3)自舉電路的作用
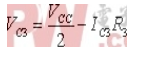
當(dāng)R3C3足夠大時,VC3不隨vi變化,可認為基本不變。這樣,當(dāng)vi為負時,T1導(dǎo)電, vK將由VCC/2向更正方向變化, 考慮到vD=vC3+vK= VC3+vK,顯然,隨著K點電位升高,D點電位vD也自動升高。 因而,即使輸出電壓幅度升得很高,也有足夠的電流iB1,使T1充分導(dǎo)電。這種工作方式稱為自舉,意思是電路本身把vD提高了。
電容自舉電路電路圖(五)
工作情況分析

電容自舉電路電路圖(六)
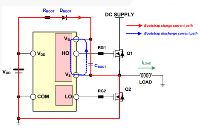
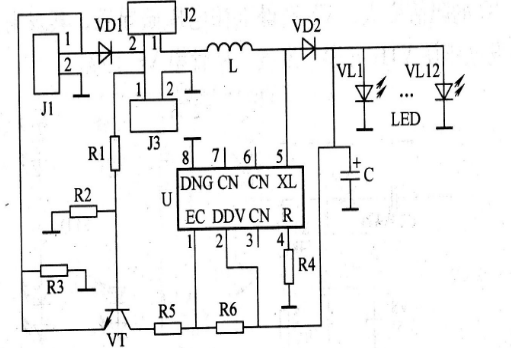
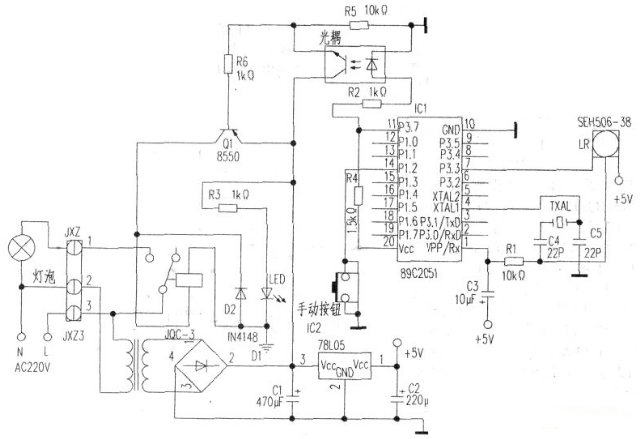
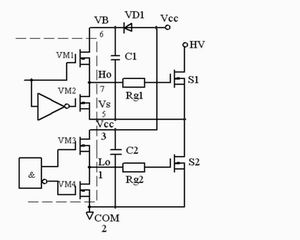
本項目的IPM型號選用IGCM20F60GA。圖2是IPM自舉電路原理圖。由圖2可知,自舉元件一端接電路的輸入部分,另一端接到同相位的輸出電路部分,借輸入、輸出的同相變化,把自己抬舉起來,即自舉元件引入的是正極性的反饋。
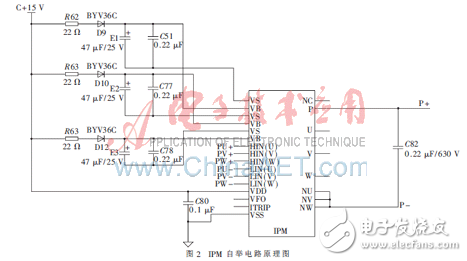
對原理圖中第一路自舉電路進行分析。IPM模塊自舉電路僅由自舉電阻R62、自舉二極管D9和自舉電容E1組成,因此簡單可靠。其電路基本工作過程為:當(dāng)VS因為下橋臂功率器件導(dǎo)通被拉低到接近地電位GND時,控制電源VCC會通過R62和D9給自舉電容E1充電。當(dāng)上橋臂導(dǎo)通,VS上升到直流母線電壓后,自舉二極管D9反向截止,從而將直流母線電壓與VCC隔離,以防止直流母線側(cè)的高壓串到控制電源低壓側(cè)而燒壞元器件。此時E1放電,給上橋臂功率器件的門極提供驅(qū)動電壓。當(dāng)VS再次被拉低時,E1將再次通過VCC充電以補充上橋臂導(dǎo)通期間E1上損失的電壓。這種自舉供電方式就是利用VS端的電平在高低電平之間不停地擺動來實現(xiàn)的。如圖2所示,自舉電路給E1充電,E1的電壓基于上橋臂輸出晶體管源極電壓上下浮動。
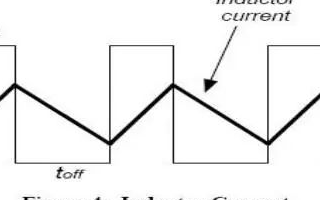
由于運行過程中反復(fù)地對自舉電容進行充放電,因此必須選擇適當(dāng)?shù)?a target="_blank">參數(shù),保證自舉電容上的電壓在電機運行時保持高于欠壓鎖定電平。
由上述分析可知,要保證E1的跌落電壓能夠得到及時、完全的補充,自舉電路對下橋臂最小導(dǎo)通時間有一定的要求。但是若能正確選擇各元器件參數(shù),自舉電路對下橋臂最小導(dǎo)通時間的限制將會大大降低。
















 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論