在對(duì)于基于視覺(jué)的狀態(tài)估計(jì)中,攝像機(jī)的運(yùn)動(dòng)對(duì)估計(jì)精度有重要影響。因此,在規(guī)劃無(wú)人機(jī)的運(yùn)動(dòng)時(shí),既要考慮以上的任務(wù),又要考慮感知質(zhì)量。
2023-07-01 09:56:41 426
426 
與ORB-SLAM2相比,ORB-SLAM3在處理大視差和長(zhǎng)時(shí)間未觀測(cè)到的場(chǎng)景時(shí)效果更好。它還提供了更準(zhǔn)確的幀間運(yùn)動(dòng)估計(jì)和更快的處理速度。
2023-06-19 09:28:12973 
碼率。共有13種預(yù)測(cè)模式(4×4塊大小9種預(yù)測(cè)模式,16×16塊大小4種預(yù)測(cè)模式),這在以往標(biāo)準(zhǔn)中是沒(méi)有的。其次采用新的運(yùn)動(dòng)估計(jì)方法。H.264有7種塊匹配模式,編碼時(shí)對(duì)其逐一計(jì)算,選擇最優(yōu)。例如較為
2008-06-25 10:35:31
基于視覺(jué)點(diǎn)云和激光點(diǎn)云深度學(xué)習(xí)由于其對(duì)環(huán)境的幾何重建能力、目標(biāo)運(yùn)動(dòng)估計(jì),在各種識(shí)別任務(wù)中越來(lái)越發(fā)揮著主導(dǎo)作用。
2022-12-27 12:05:582522 當(dāng)今的計(jì)算機(jī)視覺(jué)的子領(lǐng)域大概可以包括:場(chǎng)景重建、目標(biāo)檢測(cè)、事件檢測(cè)、視頻跟蹤、目標(biāo)識(shí)別、3D姿態(tài)估計(jì)、運(yùn)動(dòng)估計(jì)、視覺(jué)伺服、3D場(chǎng)景建模、圖像修復(fù)等。
2022-07-07 10:14:55646 研究人員使用了 NVIDIA Pix2PixHD 用于運(yùn)動(dòng)估計(jì)網(wǎng)絡(luò)訓(xùn)練的 GAN 模型,以及 FlowNet2 和 PWC-Net 。模型進(jìn)行訓(xùn)練和推理都采用 NVIDIA GPU。培訓(xùn)數(shù)據(jù)包括 1196 個(gè)獨(dú)特的視頻, 1096 個(gè)用于培訓(xùn), 50 個(gè)用于驗(yàn)證, 50 個(gè)用于測(cè)試。
2022-04-26 15:40:36574 運(yùn)動(dòng)估計(jì)是視頻圖像壓縮和視頻圖像修復(fù)等領(lǐng)域的基礎(chǔ)冋題,傳統(tǒng)的塊匹配法搜索質(zhì)量較好,但搜索速度不夠快。針對(duì)傳統(tǒng)塊匹配法搜索速度上的不足,提出一種快速的一維塊匹配運(yùn)動(dòng)估計(jì)算法。首先對(duì)運(yùn)動(dòng)矢量正交分解
2021-04-22 11:25:10 3
3 其中VO(visual odometry)指僅視覺(jué)的里程計(jì),T表示位置和姿態(tài)。松耦合中視覺(jué)運(yùn)動(dòng)估計(jì)和慣導(dǎo)運(yùn)動(dòng)估計(jì)系統(tǒng)是兩個(gè)獨(dú)立的模塊,將每個(gè)模塊的輸出結(jié)果進(jìn)行融合。
2021-04-15 15:14:522063 
實(shí)現(xiàn)SLAM的算法,根據(jù)融合框架的不同又分為松耦合和緊耦合。 其中VO(visual odometry)指僅視覺(jué)的里程計(jì),T表示位置和姿態(tài)。松耦合中視覺(jué)運(yùn)動(dòng)估計(jì)和慣導(dǎo)運(yùn)動(dòng)估計(jì)系統(tǒng)是兩個(gè)獨(dú)立的模塊,將每個(gè)
2021-04-07 16:57:071940 
從硬件實(shí)現(xiàn)的角度分析了H.264算法,重點(diǎn)研究了占用最多運(yùn)算時(shí)間的預(yù)測(cè)部分的優(yōu)化,給出了對(duì)幀內(nèi)預(yù)測(cè)、哈達(dá)馬變換以及運(yùn)動(dòng)估計(jì)算法的改進(jìn),通過(guò)簡(jiǎn)化運(yùn)算復(fù)雜、效率不高的模塊以及減少模塊間數(shù)據(jù)相關(guān)性等,對(duì)硬件進(jìn)行優(yōu)化。通過(guò)對(duì)各種測(cè)試序列的仿真,證明改進(jìn)是有效的。
2021-03-17 17:04:391844 
在H.264視頻編碼中,對(duì)于幀間預(yù)測(cè),一個(gè)16×16的宏塊(MB)可分成16×16,16×8,8×16,8×8進(jìn)行運(yùn)動(dòng)估計(jì),其中8×8還可以進(jìn)一步分為8×4,4×8,4×4的子塊。這樣,每個(gè)細(xì)分
2021-03-17 16:19:461504 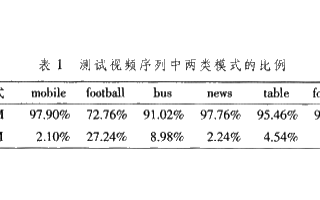
為進(jìn)一步提高編碼效率,在研究菱形算法的基礎(chǔ)上,采用了“十字”形運(yùn)動(dòng)估計(jì)算法,設(shè)計(jì)了硬件電路,并用H‘GA(Field-Pmg隱mmable Gate Amy)實(shí)現(xiàn)了算法.結(jié)合算法的特點(diǎn),設(shè)計(jì)了整體
2021-02-03 14:46:0012 運(yùn)動(dòng)估計(jì)是去除視頻序列相鄰幀之間冗余信息的有效方法,對(duì)整個(gè)視頻編碼效果有重要的影響。由兩大國(guó)際標(biāo)準(zhǔn)化組織(ISO/IEC的MPEG和ITU-T的VCEG)共同制定的最新的國(guó)際視頻編碼標(biāo)準(zhǔn)H.264
2021-01-06 09:56:152125 
H.263的輸入視頻幀格式為QCIF(Quarter Common Intermediate Format,大小為176×144)、CIF(Common Intermediate Format,大小為352×288)等。將每個(gè)視頻幀分成許多宏塊(MB-Micro Block),每個(gè)宏塊由4個(gè)Y亮度塊、1個(gè)Cb色度塊和1個(gè)Cr色度塊組成。塊(Block)的大小為8×8。H.263以宏塊為單位進(jìn)行視頻幀的壓縮。
2020-11-11 10:45:041729 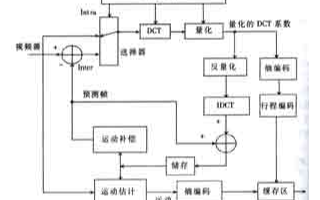
他創(chuàng)立的視覺(jué)實(shí)驗(yàn)室得到了業(yè)界的充分肯定,可以說(shuō)是全球范圍內(nèi)在高清視頻、圖像修復(fù)研究領(lǐng)域做得最好的一支團(tuán)隊(duì),對(duì)圖像濾波、圖像去模糊、圖像增強(qiáng)、圖像稀疏處理、多頻段圖像信號(hào)的融合,以及大范圍運(yùn)動(dòng)估計(jì)等研究做出了巨大的貢獻(xiàn),曾開(kāi)發(fā)出智能醫(yī)療輔助診斷、工業(yè)智能、自動(dòng)駕駛等尖端 AI 產(chǎn)品。
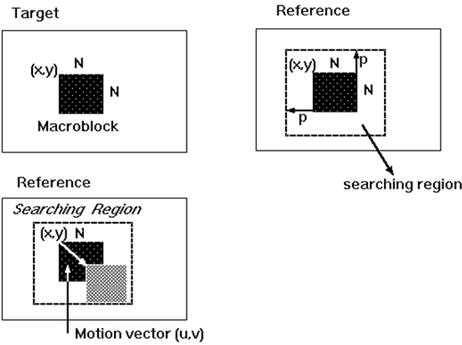
2020-07-01 14:36:132212 運(yùn)動(dòng)估計(jì)主要是針對(duì)幀間預(yù)測(cè),去除視頻幀在空間域和時(shí)間域的冗余度。塊匹配方法是目前編碼效率較高,普遍采用的一種編碼方法。首先,其要將當(dāng)前幀進(jìn)行劃分。長(zhǎng)期實(shí)踐表明,將當(dāng)前幀劃分為多個(gè)16x16的塊是比較
2020-03-04 10:12:59508 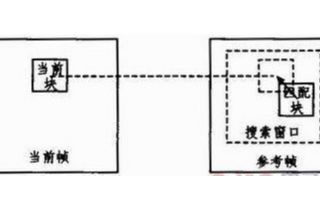
動(dòng)態(tài)遮擋規(guī)避是指運(yùn)動(dòng)視覺(jué)目標(biāo)在某一時(shí)刻發(fā)生遮擋時(shí),以該時(shí)刻視覺(jué)目標(biāo)遮擋區(qū)域?yàn)檠芯繉?duì)象,通過(guò)對(duì)視覺(jué)目標(biāo)進(jìn)行運(yùn)動(dòng)估計(jì)、合理規(guī)劃攝像機(jī)的運(yùn)動(dòng)方式并多次移動(dòng)攝像機(jī)以便觀測(cè)到更多的遮擋區(qū)域。
2020-01-16 17:37:001669 微星光攝像機(jī)包含“Extra-ISP”技術(shù),在新一代芯片的ISP的基礎(chǔ)上,增加了時(shí)域降噪算法和多維度銳度提升算法,以降低低照環(huán)境下運(yùn)動(dòng)圖像的拖影,讓人臉等運(yùn)動(dòng)物體的細(xì)節(jié)可以充分展現(xiàn)出來(lái)。時(shí)域降噪是對(duì)多幀圖像進(jìn)行分析運(yùn)算來(lái)進(jìn)行降噪,運(yùn)動(dòng)估計(jì)的設(shè)置是為了防止劇烈移動(dòng)的主體出現(xiàn)運(yùn)動(dòng)殘留的現(xiàn)象。
2020-01-11 10:09:151891 本文檔的主要內(nèi)容詳細(xì)介紹的是計(jì)算機(jī)視覺(jué)概論完成主成分分析和分類(lèi)開(kāi)始運(yùn)動(dòng)估計(jì)資料免費(fèi)下載。
2019-11-29 08:00:000 序列圖像的光流計(jì)算是計(jì)算機(jī)視覺(jué)研究領(lǐng)域運(yùn)動(dòng)估計(jì)的重要組成部分。本文介紹了0PenCV庫(kù)的特點(diǎn)和主要功能,通過(guò)調(diào)用函數(shù)庫(kù)中的金字塔Lucas-Kanade光流計(jì)算函數(shù)和塊匹配光流計(jì)算函數(shù),快速地得到
2019-10-31 11:53:463 序列圖像的光流計(jì)算是計(jì)算機(jī)視覺(jué)研究領(lǐng)域運(yùn)動(dòng)估計(jì)的重要組成部分。本文介紹了OpenCV庫(kù)的特點(diǎn)和主要功能,通過(guò)調(diào)用函數(shù)庫(kù)中的金字塔Lucas—Kanade光流計(jì)算函數(shù)和塊匹配光流計(jì)算函數(shù),快速地得到
2019-10-15 11:56:4912 我在MSR遇到了很多杰出的人,像Rick Szeliski,他教會(huì)了我在計(jì)算機(jī)視覺(jué)中深入研究運(yùn)動(dòng)估計(jì)等基本問(wèn)題的重要性。我學(xué)到的是:當(dāng)你接受一件事,擁有它,以一種令人信服的方式寫(xiě)下來(lái),改變你的想法,并且把它做得非常非常好的時(shí)候,它會(huì)帶來(lái)更大的改變。Rick Szeliski說(shuō)的沒(méi)錯(cuò)。
2019-03-05 09:20:492953 圖像的編解碼技術(shù)是多媒體技術(shù)的關(guān)鍵,H.264/AVC是國(guó)際上最先進(jìn)的視頻壓縮技術(shù),其主要特點(diǎn)是采用小尺寸整數(shù)余弦變換、1/4像素的運(yùn)動(dòng)估計(jì)精度、多參考幀預(yù)測(cè),基于上下文可變長(zhǎng)度編碼和環(huán)路內(nèi)去塊效應(yīng)濾波器等技術(shù)。
2019-02-06 08:59:001331 
H.264采用了減少視頻圖像各幀間冗余度的運(yùn)動(dòng)估計(jì)算法。運(yùn)動(dòng)估計(jì)算法傳統(tǒng)的有全搜索(FS)、三步搜索(TSS)、新三步搜索(NTSS)、四步搜索(FSS)等;常用的是鉆石搜索(DS)和非對(duì)稱(chēng)十字交叉
2019-01-15 08:10:002488 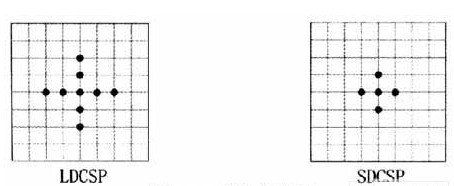
本文提出了一種基于視頻輸入的立體聲頭或單個(gè)運(yùn)動(dòng)攝像機(jī)的運(yùn)動(dòng)估計(jì)系統(tǒng)。該系統(tǒng)以低延遲實(shí)時(shí)運(yùn)行,運(yùn)動(dòng)估計(jì)用于導(dǎo)航目的。系統(tǒng)的前端是一個(gè)特征跟蹤器。點(diǎn)特征在幀對(duì)之間匹配,并以視頻速率鏈接到圖像軌跡中。然后
2018-12-03 08:00:001 不管編解碼標(biāo)準(zhǔn)變得如何復(fù)雜,它們的基本技術(shù)思想都是類(lèi)似的。通過(guò)幀內(nèi)壓縮和幀間壓縮,同時(shí)壓縮空間冗余度和時(shí)間冗余度。對(duì)于編碼來(lái)說(shuō),都要經(jīng)過(guò)預(yù)處理,運(yùn)動(dòng)估計(jì),變換,量化,熵編碼這幾個(gè)基本步驟;解碼過(guò)程則跟編碼過(guò)程完全相反。
2018-11-29 14:55:545012 關(guān)鍵詞:編碼 , 幀間預(yù)測(cè) 1 引言 在H.264視頻編碼中,對(duì)于幀間預(yù)測(cè),一個(gè)16×16的宏塊(MB)可分成16×16,16×8,8×16,8×8進(jìn)行運(yùn)動(dòng)估計(jì),其中8×8還可以進(jìn)一步分為8×4,4
2018-10-31 16:35:01258 關(guān)鍵詞:估計(jì)算法 , 快速運(yùn)動(dòng) H.264是現(xiàn)有最重要數(shù)據(jù)壓縮編碼國(guó)際標(biāo)準(zhǔn)之一。同時(shí)快速運(yùn)動(dòng)估計(jì)算法一直是視頻壓縮中的研究熱點(diǎn)。本文針對(duì)一些快速估計(jì)算法過(guò)早確定了搜索方向,容易陷入局部最小點(diǎn),損失了
2018-10-08 07:00:01280 通常情況下,攝像機(jī)的運(yùn)動(dòng)形式可以分為兩種:a)攝像機(jī)的支架固定,但攝像機(jī)可以偏轉(zhuǎn)、俯仰以及縮放; b)將攝像機(jī)裝在某個(gè)移動(dòng)的載體上。由于以上兩種情況下的背景及前景圖像都在做全局運(yùn)動(dòng),要準(zhǔn)確檢測(cè)運(yùn)動(dòng)目標(biāo)的首要任務(wù)是進(jìn)行圖像的全局運(yùn)動(dòng)估計(jì)與補(bǔ)償。
2018-08-24 11:22:5013113 景物體占據(jù)大部分畫(huà)面時(shí)帶來(lái)的偽影。它還改進(jìn)了基于硬件傳感器的傳統(tǒng)方法,通過(guò)改進(jìn)運(yùn)動(dòng)估計(jì)達(dá)到更精確的效果,尤其是近距離拍攝。。
2018-03-16 16:08:174303 個(gè)過(guò)程中,解決了3個(gè)具體問(wèn)題:快速的運(yùn)動(dòng)估計(jì)方法的解析解、平面場(chǎng)景朝向的快速估計(jì)方法的解析解、前向運(yùn)動(dòng)模糊核的數(shù)值生成方法.實(shí)驗(yàn)結(jié)果驗(yàn)證了該算法的正確性. 本文焦點(diǎn)放在一個(gè)具有典型代表性的運(yùn)動(dòng)模糊情況一一相機(jī)以前
2018-01-12 14:46:180 運(yùn)動(dòng)估計(jì)是去除視頻時(shí)間維冗余的編碼技術(shù)。而目前通用的平移運(yùn)動(dòng)模型無(wú)法有效地表示物體的局部非剛性復(fù)雜運(yùn)動(dòng).為此,提出一種基于改進(jìn)高斯一牛頓法的彈性運(yùn)動(dòng)估計(jì)方法.首先,通過(guò)分析初始迭代點(diǎn)對(duì)高斯一牛頓迭代
2018-01-08 15:32:531 量構(gòu)成的集合通常被稱(chēng)作光流場(chǎng)(optical flow),主要涉及一個(gè)從某一圖像序列中計(jì)算其可見(jiàn)點(diǎn)的三維速度矢量在成像表面上投影的過(guò)程,因而有些文獻(xiàn)也稱(chēng)之為光流場(chǎng)計(jì)算或運(yùn)動(dòng)估計(jì)(motion estimation),是視頻壓縮、三維重建、運(yùn)動(dòng)目標(biāo)檢測(cè)
2018-01-05 16:50:041 現(xiàn)有的視頻編碼方法單獨(dú)針對(duì)不同的編碼技術(shù)進(jìn)行優(yōu)化。雖然簡(jiǎn)化了算法的實(shí)現(xiàn),但卻忽略了這些技術(shù)之間的內(nèi)在關(guān)系而局限了性能的進(jìn)一步提升.嘗試針對(duì)HEVC中的分像素插值和分像素運(yùn)動(dòng)估計(jì),建立一種整合的優(yōu)化
2017-12-27 10:37:590 針對(duì)亞像素運(yùn)動(dòng)矢量的精確估計(jì)問(wèn)題,提出一種基于核回歸修正的上采樣相位相關(guān)精確運(yùn)動(dòng)估計(jì)算法。首先,使用矩陣相乘離散傅里葉變換方法快速計(jì)算上采樣相位相關(guān)曲面,并通過(guò)檢測(cè)其峰值坐標(biāo)實(shí)現(xiàn)運(yùn)動(dòng)矢量的亞像素級(jí)
2017-12-14 16:22:280 基于2D的方法主要通過(guò)估計(jì)單應(yīng)性矩陣,如基于運(yùn)動(dòng)矢量的視頻去抖動(dòng)算法,通過(guò)塊運(yùn)動(dòng)估計(jì)來(lái)估算攝像機(jī)的全局運(yùn)動(dòng)參數(shù)。利用RANSAC算法或圖像的SIFT特征匹配增強(qiáng)全局運(yùn)動(dòng)參數(shù)估計(jì)的魯棒性。目前最先
2017-12-11 11:01:502 針對(duì)UMHexagonS算法冗余搜索的問(wèn)題,使用大十字搜索判定結(jié)果,改進(jìn)原有的運(yùn)動(dòng)估計(jì)算法。改進(jìn)算法判斷最優(yōu)點(diǎn)可能分布區(qū)域,使用相應(yīng)改進(jìn)搜索模板搜索,降低搜索點(diǎn)個(gè)數(shù),達(dá)到避免冗余搜索的目的,提高運(yùn)動(dòng)
2017-11-24 10:51:152 光流運(yùn)動(dòng)估計(jì)是計(jì)算機(jī)視覺(jué)領(lǐng)域的一個(gè)重要的研究領(lǐng)域,為了抑制噪聲對(duì)光流場(chǎng)估計(jì)的影響,并實(shí)現(xiàn)大位移光流場(chǎng)求解,建立了基于全局與局部相結(jié)合的CLC;-TV變分光流估計(jì)模型,并提出求解方法。將LK局部光流
2017-11-06 11:42:4212 比較前沿的學(xué)術(shù)文獻(xiàn),希望可以幫到你。
2016-12-15 17:38:381 采用基于TI公司高性能Davinci系列TMS320DM6437處理器的SEED-DEC6437 EVM板作為主要硬件平臺(tái),在DSP開(kāi)發(fā)環(huán)境CCS3.3中采用C語(yǔ)言和匯編語(yǔ)言混合編程實(shí)現(xiàn)運(yùn)動(dòng)估計(jì)算法的DSP移植,并加入人機(jī)接口,
2013-09-25 11:26:5066 提出一種基于輸入碼流信息和已轉(zhuǎn)碼碼流信息的視頻轉(zhuǎn)碼快速運(yùn)動(dòng)估計(jì)算法。本算法利用Alpha-激勵(lì)均值濾波通過(guò)輸入碼流的運(yùn)動(dòng)矢量合成作為備選預(yù)測(cè)運(yùn)動(dòng)矢量之一,并利用H.264標(biāo)準(zhǔn)中
2013-01-08 16:20:258 本文采用了技術(shù)比較成熟的VHDL語(yǔ)言進(jìn)行設(shè)計(jì),并使用Quartus II軟件進(jìn)行時(shí)序仿真。由仿真結(jié)果可知,無(wú)論是在功能的實(shí)現(xiàn)上還是在搜索的準(zhǔn)確性、高效性以及FPGA片上資源的利用率上,本
2012-05-09 16:15:5232 介紹了 視頻壓縮 中分?jǐn)?shù)像素快速塊匹配運(yùn)動(dòng)估計(jì)的基礎(chǔ)原理,由于全搜索算法計(jì)算量很大,需要發(fā)展快速算法。對(duì)現(xiàn)有快速算法進(jìn)行了研究總結(jié),介紹了所應(yīng)用的數(shù)學(xué)模型、向量預(yù)測(cè)
2011-08-30 16:17:3814 運(yùn)動(dòng)估計(jì)就是在幀間預(yù)測(cè)時(shí)設(shè)法找到當(dāng)前幀的像素(或圖像塊)是從上一幀圖像的什么位置移動(dòng)過(guò)來(lái)的,以該位置上的像素(或圖像塊)作為預(yù)測(cè)依據(jù),以此提高預(yù)測(cè)的準(zhǔn)確性。
2011-08-25 11:20:491925 
本文研究了加性高斯色噪聲背景中一維高分辨距離成像中的運(yùn)動(dòng)估計(jì). 導(dǎo)彈和目標(biāo)的相對(duì)運(yùn)動(dòng)對(duì)一維高分辨距離成像有較大影響, 階躍變頻體制回波信號(hào)可以表示為多項(xiàng)式相位的形式, 速
2011-06-20 16:11:0017 本文首先重點(diǎn)闡述了運(yùn)動(dòng)視頻分析若干關(guān)鍵技術(shù)的研究現(xiàn)狀與我們的解決方法,包括全局運(yùn)動(dòng)估計(jì)、視頻運(yùn)動(dòng)目標(biāo)提取與跟蹤、視頻內(nèi)容標(biāo)注等等。然后介紹了我們面向競(jìng)技體育運(yùn)動(dòng)訓(xùn)
2011-05-28 16:47:3673 目標(biāo)跟蹤是智能監(jiān)控領(lǐng)域的關(guān)鍵技術(shù),本文主要是研究實(shí)現(xiàn)這一關(guān)鍵技術(shù)。提出一種融合運(yùn)動(dòng)目標(biāo)的面積和矩特征進(jìn)行匹配的算法,并結(jié)合運(yùn)動(dòng)估計(jì)算法對(duì)下一時(shí)刻目標(biāo)最可能存在的方
2011-05-05 16:57:1344 針對(duì)視頻編碼中的核心技術(shù)運(yùn)動(dòng)估計(jì),提出一種基于運(yùn)動(dòng)矢量特性的運(yùn)動(dòng)估計(jì)快速算法。算法分析視頻序列運(yùn)動(dòng)矢量的特性,對(duì)靜止塊設(shè)定自適應(yīng)閾值直接終止搜索,自適應(yīng)選擇搜
2010-09-03 15:43:4632 為了降低全搜索運(yùn)動(dòng)估計(jì)算法帶來(lái)的巨大計(jì)算量,提高運(yùn)動(dòng)估計(jì)計(jì)算速度,提出了一種新型的用于全搜索運(yùn)動(dòng)估計(jì)硬件結(jié)構(gòu)。該硬件結(jié)構(gòu)能實(shí)時(shí)地通過(guò)全搜索運(yùn)動(dòng)估計(jì)來(lái)搜索每個(gè)像素塊
2010-07-29 16:07:4516 H.264/AVC引入的可變塊尺寸運(yùn)動(dòng)估計(jì)技術(shù),使得幀間模式判決異常復(fù)雜。針對(duì)這個(gè)問(wèn)題,提出了一個(gè)新概念-相鄰宏塊模式同構(gòu),并給出一種基于修正運(yùn)動(dòng)矢量的模式快速判決算法,通
2010-07-06 16:00:377 提出了一種基于預(yù)測(cè)的自適應(yīng)六邊形搜索方法,并將此算法與其他常用的快速運(yùn)動(dòng)估計(jì)算法進(jìn)行實(shí)驗(yàn)比較。實(shí)驗(yàn)結(jié)果表明:該算法有效地降低了搜索點(diǎn)數(shù),搜索精度比較接近于FS算法
2010-07-02 15:53:0119 H.264是現(xiàn)有最重要數(shù)據(jù)壓縮編碼國(guó)際標(biāo)準(zhǔn)之一。
快速運(yùn)動(dòng)估計(jì)算法一直是視頻壓縮中的研究熱點(diǎn)。本文針對(duì)一些快速估計(jì)算法過(guò)早確定了搜索方向,容易陷入局部最小點(diǎn),
2010-06-25 11:50:191482 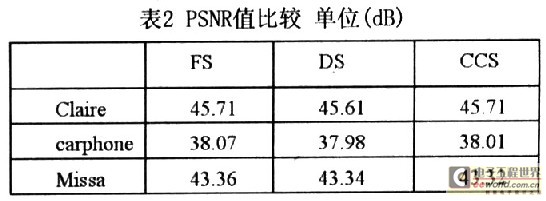
本文提出了一種適用于可視電話視頻特性的快速運(yùn)動(dòng)估計(jì)算法。針對(duì)可視電話低碼率的要求和頭肩序列小運(yùn)動(dòng)的特性設(shè)計(jì)了一種計(jì)算量更小的塊匹配方案。經(jīng)過(guò)實(shí)驗(yàn)證明,這種算法可
2010-03-01 15:37:3410 視頻編解碼芯片中運(yùn)動(dòng)估計(jì)與補(bǔ)償單元(MECU)的算法復(fù)雜,使用傳統(tǒng)硬件描述語(yǔ)言建立模型和模型驗(yàn)證的過(guò)程繁瑣耗時(shí),為了縮短芯片驗(yàn)證時(shí)間,本文針對(duì)MECU模塊提出了基于SystemC語(yǔ)言
2010-02-24 12:07:2116 為了充分利用CELL BE 處理器SIMD 技術(shù)的數(shù)據(jù)并行處理能力,本文介紹一種運(yùn)動(dòng)估計(jì)算法,和已有的鉆石搜索算法(DS)相比該算法能夠?qū)崿F(xiàn)更精確的運(yùn)動(dòng)估計(jì)和更低的運(yùn)動(dòng)復(fù)雜度。大
2010-01-27 14:09:0912 Imagine 是一款媒體處理的流體系結(jié)構(gòu)芯片,它提供三級(jí)帶寬層次,能夠充分開(kāi)發(fā)數(shù)據(jù)局域性和并行性,獲得很高的性能。H.264 是目前最新的數(shù)字視頻編碼標(biāo)準(zhǔn),它性能優(yōu)越卻計(jì)算
2010-01-16 17:01:3315 運(yùn)動(dòng)物體檢測(cè)是圖像處理和分析系統(tǒng)的關(guān)鍵技術(shù),為了能夠更準(zhǔn)確的檢測(cè)視頻流中的運(yùn)動(dòng)物體,本文提出了一種基于運(yùn)動(dòng)估計(jì)的運(yùn)動(dòng)物體檢測(cè)方法,該方法以運(yùn)動(dòng)估計(jì)過(guò)程中產(chǎn)生
2009-12-14 13:37:4816 圖像特征點(diǎn)檢測(cè)是圖像匹配、目標(biāo)識(shí)別以及運(yùn)動(dòng)估計(jì)等領(lǐng)域的一項(xiàng)關(guān)鍵技術(shù)。本文對(duì)圖像輪廓二維信息進(jìn)行降維處理,提出了一種特征點(diǎn)質(zhì)量評(píng)價(jià)因子。利用該因子并結(jié)合文中給
2009-12-14 13:30:5115 塊匹配運(yùn)動(dòng)估計(jì)VLSI結(jié)構(gòu)研究與進(jìn)展:塊匹配運(yùn)動(dòng)估計(jì)是視頻編碼器中的計(jì)算量和存儲(chǔ)訪問(wèn)最密集的模塊,為了滿足實(shí)時(shí)編碼的需求常用VLSI 結(jié)構(gòu)實(shí)現(xiàn)。本文對(duì)塊匹配運(yùn)動(dòng)估計(jì)的VLSI 結(jié)
2009-12-14 09:49:244 TMS320DM642 是TI 公司新近推出的一款面向數(shù)字多媒體應(yīng)用的專(zhuān)業(yè)芯片,它基于C64X內(nèi)核,使用先進(jìn)的甚長(zhǎng)指令字結(jié)構(gòu)(VLIW),具有強(qiáng)大的并行處理能力。本文完成了基于H.264的運(yùn)動(dòng)估計(jì)
2009-12-02 16:30:4314 分析了ARM7TDMI的結(jié)構(gòu)特點(diǎn),根據(jù)處理器結(jié)構(gòu)對(duì)MPEG一4編碼算法進(jìn)行了優(yōu)化。通過(guò)采用雙Block DCT、優(yōu)化的VLC編~ NGDS運(yùn)動(dòng)估計(jì)算法等方法,大幅度提高了編碼器的速度,達(dá)到實(shí)時(shí)編碼的要
2009-12-01 14:28:5137 該文針對(duì)全局運(yùn)動(dòng)估計(jì)計(jì)算復(fù)雜度過(guò)高的問(wèn)題,提出了一種基于運(yùn)動(dòng)矢量對(duì)消和差分原理的快速全局運(yùn)動(dòng)估計(jì)方法。基于不同象限運(yùn)動(dòng)矢量對(duì)之間存在的對(duì)稱(chēng)抵消特性,首先估計(jì)出
2009-11-20 15:26:5912 H.264運(yùn)動(dòng)估計(jì)算法在Imagine流處理器上的加速實(shí)現(xiàn):Imagine 是一款媒體處理的流體系結(jié)構(gòu)芯片,它提供三級(jí)帶寬層次,能夠充分開(kāi)發(fā)數(shù)據(jù)局域性和并行性,獲得很高的性能。H.264 是目
2009-10-06 09:40:2812 基于AVS-M的幀間模式快速選擇算法:AVS-M是中國(guó)自主制訂的數(shù)字音視頻編碼系列標(biāo)準(zhǔn)(AVS)中的移動(dòng)視頻編碼標(biāo)準(zhǔn)。AVS-M采用了可變塊尺寸運(yùn)動(dòng)估計(jì)和率失真優(yōu)化模式判決,增加了編碼
2009-10-06 09:39:165 以DSP TMS320C6416 為核心處理器, 設(shè)計(jì)了一種通用的MPEG-4實(shí)時(shí)圖象處理系統(tǒng)。文中對(duì)系統(tǒng)的硬件系統(tǒng)及軟件設(shè)計(jì)進(jìn)行了詳細(xì)的介紹。其中視頻采集、運(yùn)動(dòng)估計(jì)算法和軟件的優(yōu)化是保證本
2009-08-21 11:07:2915 提出了一種基于運(yùn)動(dòng)特性的自適應(yīng)快速運(yùn)動(dòng)估計(jì)算法。該算法充分利用視頻圖像序列的運(yùn)動(dòng)特征進(jìn)行運(yùn)動(dòng)模式判定,實(shí)現(xiàn)了一種簡(jiǎn)單高效的搜索方法,并且根據(jù)不同的運(yùn)動(dòng)模式動(dòng)態(tài)
2009-08-15 07:59:4218 本文提出并實(shí)現(xiàn)了一種四步搜索塊匹配的運(yùn)動(dòng)估計(jì)算法,并在運(yùn)動(dòng)估計(jì)算法的實(shí)現(xiàn)中給出了整象素搜索與半象素搜索相結(jié)合、單矢量估計(jì)與四矢量估計(jì)相結(jié)合的改進(jìn)方法,該算法
2009-08-10 10:45:4817 在視頻編碼的過(guò)程中,運(yùn)動(dòng)估計(jì)占據(jù)了舉足輕重的地位.其性能優(yōu)劣會(huì)在一定程度上決定了碼流質(zhì)量.采用16×16 宏塊能夠提高壓縮比,但容易產(chǎn)生方塊效應(yīng),使用4×4宏塊可以提高圖
2009-08-05 09:01:536 運(yùn)動(dòng)估計(jì)是視頻壓縮中的關(guān)鍵技術(shù),是視頻編碼中的主要開(kāi)銷(xiāo)。全搜索算法是最簡(jiǎn)單可靠的塊匹配算法。本文在傳統(tǒng)全搜索算法的基礎(chǔ)上,提出一種方向性多層抽樣繼承排除全搜
2009-05-30 13:44:3317 根據(jù)H.264中整數(shù)變換、量化的特點(diǎn),可以證明在宏塊預(yù)測(cè)SAD和實(shí)際SAD的誤差小于某一門(mén)限時(shí),對(duì)編碼質(zhì)量不會(huì)產(chǎn)生影響。結(jié)合H.264碼率控制算法中自適應(yīng)SAD的預(yù)測(cè),提出一種根據(jù)SAD預(yù)
2009-04-20 10:02:1615 提出一種基于多分辨率的H.264多參考幀運(yùn)動(dòng)估計(jì)算法,通過(guò)引入多分辨率的思想,迅速得到第1個(gè)參考幀的運(yùn)動(dòng)矢量,利用該運(yùn)動(dòng)矢量和已建立的臨時(shí)矢量映射表預(yù)測(cè)其余參考幀的運(yùn)
2009-04-09 08:45:1724 常見(jiàn)的全局運(yùn)動(dòng)算法存在的問(wèn)題是僅僅考慮像素的殘差,而忽略了相鄰像素和分割信息等因素對(duì)算法的影響。為了解決上述問(wèn)題,該文提出一個(gè)基于最大后驗(yàn)概率(MAP)的全局運(yùn)動(dòng)估計(jì)
2009-03-30 08:53:4629 視頻序列圖像在時(shí)間上存在很強(qiáng)的相關(guān)性,采用運(yùn)動(dòng)估計(jì)和運(yùn)動(dòng)補(bǔ)償技術(shù)可以消除時(shí)間冗余以提高編碼效率,這種技術(shù)廣泛用于視頻壓縮的一些國(guó)際標(biāo)準(zhǔn)中,如H.261/263/264、MPEG-1/2/4。
2008-08-25 13:09:1824 摘要:從硬件實(shí)現(xiàn)的角度分析了H.264算法,重點(diǎn)研究了占用最多運(yùn)算時(shí)間的預(yù)測(cè)部分的優(yōu)化,給出了對(duì)幀內(nèi)預(yù)測(cè)、哈達(dá)馬變換以及運(yùn)動(dòng)估計(jì)算法的改進(jìn),通過(guò)簡(jiǎn)化運(yùn)算復(fù)雜、
2006-03-24 13:29:53573 
 電子發(fā)燒友App
電子發(fā)燒友App









 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論