基于MSP430處理器的 I2C總線讀取MPU6050傳感器數據
2022-02-10 06:59:27
為400kbit/s常見iic設備eeprom觸摸芯片溫濕度傳感器mpu6050(姿態傳感器)…框架圖I2C核心提供I2C總線驅動和設備驅動的注冊方法、注銷方法、I2C通信硬件無關代碼I2C 總線驅動主要包含I2C硬件體系結構中適配器(iic控制器)
2021-12-13 06:18:24
轉自:I2C設備、讀寫地址的關系文章目錄結論MPU6050手冊MPU6050的AD0端口接低電平MPU6050的AD0端口接高電平MPU6050相關問題資料整理結論I2C設備的寫地址 = I2C設備地址
2022-02-10 07:10:10
從設備adapter i2c 控制器對象數據包對象讀寫數據設備樹中添加MPU6050信息內核選配添加設備樹節點編寫驅動程序 mpu6050_i2c_drv.cI2c協議和時序I2c介紹I2C(In...
2022-02-10 06:51:12
用這個布線去,芯片是MPU6050三軸陀螺儀加速度計,很奇怪!#define delays delay_ms(2)//delays;//初始化IICvoid IIC_Init(void
2019-04-25 03:39:52
這是我的 I2C MPU6050 讀取程序 , 上位機串口上看到了值總是很小不知道為什么 ,各位大神 , 求解呀, 急著調小飛機 ,溫度似乎也有問題,急急急。。。。。傳上來的值老是有問題 , 不知道為啥 。這是初始化函數
2019-04-15 06:36:24
2.4 STM32 MPU6050數據獲取(IIC + DMP)本篇文章主要針對廉價的MPU6050模塊。我們這里完成了MPU6050的數據獲取、零偏自動設置、溫漂抑制。這里提供源碼工程文件,供大家
2021-08-09 07:17:09
MPU6050 加速度傳感器模塊
2023-03-28 13:06:19
K013 基于51/STM32MPU6050測試 OLED0.96顯示原始數據一.實現功能二.硬件清單三.資料清單四.MPU6050模塊簡介與通信協議1.基本參數2.引腳說明3.時序圖五.接線六
2022-02-10 06:58:54
錯,debug時如第一張圖片中return-1,此工程中的I2C程序經測試可以讀出MPU6050的角速度和加速度的原始數據,另外在main函數中也進行了MPU6050_Init,程序如第二張圖,實在是不知道問題出在哪里?請大神指點指點!
2019-06-25 04:35:55
時,MPU-60X0提供完整的9軸運動融合輸出到其主I2C或SPI端口(SPI僅在MPU-6000上可用)。MPU6050, 該芯片內部集成一個三軸加速度傳感器和一個三軸陀螺儀,并且自帶 DMP(Digital M...
2022-02-11 07:46:16
文章目錄引言簡述一下mpu6050和stm32的一些坑吧MPU6050 I2C讀寫MPU6050 初始化讀取內部溫度傳感器讀取陀螺儀DMP的移植讀取三軸角度引言最近玩了IMU模塊,看了很多的博客
2022-02-10 07:35:27
用myrio上的I2C接口接上mpu6050,再通過labview上的myrio工具包里的I2C模塊對I2C端口數據進行讀取,但是讀取出來的數據就算mpu6050傾斜移動都沒變化,只是一個勁地跳動。現在不知道怎么辦,希望大神能夠指導一下,感激不盡
2016-04-30 19:27:08
尊敬的TI工程師:
我將CC3200 與 mpu6050 用I2C相連。 mpu6050 上能另加一個ak8975,可選擇性的用一個函數將ak8975加入I2C總線。
我遇到的情況是:我一度通過
2018-05-14 00:05:00
MCU 工作完美,我可以對其進行編程并使用 RA02,但我在嘗試讓 MPU6050 工作時遇到了一個奇怪的問題。到目前為止我嘗試過的事情:1.我正在使用一個小草圖來讀取所有可能的 I2C 地址,但我根本
2023-03-01 06:02:24
做過STM32驅動MPU6050,實驗完成,但是用LPC1769的模擬I2C驅動的時候,因為還沒有深刻了解LPC1769,不知道有沒有雙準向IO口,所以用的簡單切換式方法輸出(SCL和SDA)和輸入
2017-10-21 18:53:10
使用PIC24FJ128GA204 MCU作為好奇心板的一部分。因此,我使用XC16編譯器。我選擇使用MCC生成I2C代碼,我可以用它與MPU6050加速度表進行接口。我可以看到引腳RB8=SCL,RB9=SDA,VCC在DEV
2018-09-06 16:13:48
我嘗試使用從PSoC社區(MPU 6050——需要幫助讀取傳感器值)獲取的代碼之一,并根據社區提出的最新API推薦的更改。當我運行它時,它說MPU6050無法連接。我想知道在I2C和PSoC
2018-11-01 17:03:00
2.4 STM32MPU6050數據獲取(IIC + DMP)本篇文章主要針對廉價的MPU6050模塊。我們這里完成了MPU6050的數據獲取、零偏自動設置、溫漂抑制。這里提供源碼工程文件,供大家
2022-02-10 06:01:07
更改,與代碼對應即可。I2C 基本時序函數MPU6050 與 MCU 通過 I2C 總線進行通訊。用軟件模擬的方式實現 I2C 底層基本時序函數,包括起始、停止信號的產生,以及發送/接收單字
2018-05-05 18:02:51
文章目錄1、I2C總線1.1 I2C總線協議1.2 I2C總線讀寫操作1.3 STM32F0-I2C控制器特征2、MPU6050MPU6050的特性參數MPU6050的寄存器介紹MPU6050的設備
2022-02-10 06:21:05
STM32F103C8T6最小系統板怎樣做才能通過I2C讀取MPU6050的數據呢?
2021-12-14 07:53:13
開發平臺野火STM32H750開發板板載的MPU6050說在前面—關于I2CI2C是一種雙總線的通訊協議,關于I2C的資料其實網上有很多,而作為一名比較專業的嵌入式開發人員來講,I2C、SPI
2022-02-10 06:23:01
的代碼如下(見附件)// I2C device class (I2Cdev) demonstration Arduino sketch for MPU6050 class// 10/7/2011
2021-07-28 11:45:49
有MPU6050的例程,測試后很好用,如下圖(夢幻聯動一下:樹莓派PICO+freeRTOS)因為pico上有現成的能用的例程,所以改一改之后直接移植到linux上首先介紹一下linux下的I2C框架①、I2C 總線驅動,I2C 總線驅動就是 SOC 的 I2C 控制器驅動,也叫做 I2C 適配器
2022-02-10 06:48:37
請教:stm32用模擬i2c與mpu6050通信怎么設置波特率,或是用延時能實現嗎?
2016-03-22 23:15:53
1、MPU6050簡介MPU6050是一款由三軸加速度和三軸陀螺儀組成的六軸IMU,可以支持I2C和SPI接口讀取數據,目前本人手上的MPU6050模塊只支持I2C接口,電源為5V,MPU6050
2022-08-26 16:55:01
【CW32飯盒派開發板試用體驗】+MPU6050測試
硬件資源介紹
本次實驗主要測試了I2C1和MPU6050。上位機串口助手通過USART3(PA9,PA10)與主板進行通訊,
https
2023-05-30 00:19:01
)/*********************************************************************************硬石YS-F1Pro開發板例程功能說明**例程名稱: 1. MPU6050陀螺儀(軟件I2C
2016-08-05 08:56:01
今天測試一下6軸加速度傳感器MPU6050,主要驗證庫文件能否兼容我的模塊。首先打開在線編程公有庫找到MPU6050并復制到自己的私有庫里。然后新建一個工程:打開工程后在工程中添加已經保存的庫
2017-06-12 23:19:24
平衡車硬件準備的差不多了,下面開始一步一步的調節軟件,對于平衡車來講主要的就是陀螺儀,所以先調陀螺儀,沒有使用官方庫里面 的I2C,使用的是IO口模擬的,顯示使用的是官方提供的TFT,程序也是在官方的TFT例程上移植了MPU6050的程序,讓大家見笑了。
2016-08-11 00:38:45
數據 */
msg[1].addr = client->addr;/* mpu6050地址 */
msg[1].flags = I2C_M_RD;/* 標記為讀取數據*/
msg[1
2023-07-25 22:00:09
在運作環境中僅有±1%變動的振蕩器。
該傳感器詳細介紹見:https://bbs.elecfans.com/jishu_2273503_1_1.html
二、硬件連接
MPU6050是通過I2C連接MCU
2023-05-04 08:11:18
/dev設備目錄下的i2c-2和i2c-3:那么,我們就可以通過i2cdetect軟件和ioctl()系統接口函數進行對I2C設備的讀寫了,我這邊直接接入了一個MPU6050的模塊:可以
2023-01-22 15:10:12
PSoC 4XX7_BLE 有兩個 SCB,每一個 SCB 都可以實現 I2C、 UART 或 SPI 接口。 I2C 模式:硬件 I2C 模塊實現了一個完整的多主設備和從設備接 口(它具有多
2015-05-17 17:48:23
,使用I2C協議來通信,配置如下:然后是引腳的配置然后建立一些文件來保存代碼,方便移植接下來是代碼:#ifndef MPU6050_H#define MPU6050
2015-11-14 01:02:57
。MPU6050的數據接口用的是I2C總線協議,因此我們需要Wire程序庫的幫助來實現Arduino與MPU6050之間的通信。請先確認你的Arduino編程環境中已安裝Wire庫。Wire庫的官方文檔
2021-01-28 09:52:28
屏硬件與MPU6050連接示意圖如圖2所示,通過COF屏的GPIO口模擬I2C信號與MPU6050通訊。具體硬件連接時通過COF屏的轉接板HDL662S使用P32連接MPU6050模塊的SDL腳
2022-04-11 01:08:47
MPU6050用的君悅模塊。在串口模式下,用上位機接收數據,每組數據包括三軸加速度、三軸角速度、歐拉角、溫度和時間戳也才50ms/每組。而我切換成I2C模式后,用STC89C52RC的IO口模擬
2019-05-28 03:20:18
連接到一個三軸磁力計,MPU6050 能提供一個完整的九軸融合輸出到其主 I2C 端口。 二、調用開源庫驅動 新建工程example06_mpu6050 2.1 添加依賴 修改
2023-03-28 14:46:13
。MPU6050其實就是一個 I2C 器件,里面有很多寄存器(但是我們用到的只有幾個),我們通過讀寫寄存器來操作這個芯片。所以首要問題就是 STM32 和 MPU6050 的 I2C 通信。1、配置
2015-05-27 17:43:29
程序功能:1,波形顯示3軸加速度和角速度;2,顯示當前環境溫度;程序運行效果圖: 可執行程序下載: Ginkgo_USB-I2C_MPU6050_Setup_v2.0.0.rar (9.41 MB
2018-12-05 09:33:00
程序功能:1,波形顯示3軸加速度和角速度;2,顯示當前環境溫度;程序運行效果圖: 可執行程序下載: Ginkgo_USB-I2C_MPU6050_Setup_v2.0.0.rar (9.41 MB
2022-02-10 07:40:07
實驗注意點:1.mpu6050是采用的I2C通信,所以我們需要將BOOT1和BOOT0置于0**才可正常通信,不可使用SPI模式進行,否則不可正常顯示。實驗mpu6050采用的是5v的供電電壓,...
2021-08-17 09:23:20
:drv_mpu6050.c 中的 mpu6050_write_reg() 函數是 MCU 向 mpu6050 寄存器寫數據。此函數的實現共有 2 種,分別調用了 I2C 設備驅動接口
2022-08-18 10:54:29
MPU6050使用I2C通訊,配置STM32引腳,圖為STM32F103。輪詢模式只需要配置PB6:I2C_SDA,PB7_SCL,分別接MPU6050模塊的對應引腳。中斷模式還要接一個GPIO口至
2022-02-10 07:06:43
我最近想使用imx6ull實現裸機開發I2C讀取MPU6050,并使用DMA方式傳輸數據。我在官方的I2C寄存器手冊里并沒有看到關于DMA使能相關的寄存器,但是我在內核中發現了一些與i2c dma
2023-05-17 06:04:41
通過MPU6050測溫來進行I2C的驗證學習關于MPU6050寄存器相關可以參考https://blog.csdn.net/he__yuan/article/details/76559569I2C
2022-02-10 06:26:29
什么是I2C通訊協議呢?MPU6050是什么?MPU6050有何特點?怎樣去調試基于STM32F103C8T6的MPU6050組件呢?
2021-11-15 06:45:05
代碼軟件的例子,也沒有應用程序說明與這個芯片接口。他們只提供與Arduino、AVR、STM、ARM、TI、PSOC和PIC IDE一起工作的軟件下載。我已經用MPU6050閱讀了所有有關I2C的帖子
2019-10-08 10:33:23
樹莓派I2C讀寫MPU6050不同方式效率對比? 近期在調整PID參數的時候,發現mpu6050濾波后的姿態嚴重滯后,查看該線程的周期時間,一次循環是16000us以上,頻率才60多HZ,調整其他
2022-02-10 07:11:24
有沒有用新唐M0或者M4的硬件I2C 操作MPU6050的例子,基于新唐BSP庫函數的?
2023-06-26 07:27:27
I2CI2C有兩條總線線路,分別是SCL(時鐘線)和SDA(數據線)。I2C的時序非常重要:讀數據和寫數據的時序有點不一樣,在寫程序的時候就體現得到。I2C的SCL高電平時有效,SDA高電平為1
2022-02-10 07:14:39
的 mpu6050_write_reg() 函數是 MCU 向 mpu6050 寄存器寫數據。此函數的實現共有 2 種,分別調用了 I2C 設備驅動接口 rt_i2c
2022-10-25 12:02:10
請教各位大神關于mpu6050器件地址的問題,我想我的是當mpu6050作為從機時,一條I2C總線最多接幾個mpu6050
2015-05-17 08:58:27
請教各位大神關于mpu6050器件地址的問題,當mpu6050作為從機時,一條I2C總線最多接幾個mpu6050
2015-05-17 18:21:49
最近在研究四軸飛行器,看版上有人直接把HMC5883L和MS5611兩個傳感器的I2C都接到mpu6050的主I2C上,請問這種方式可行嗎,不會數據沖突嗎?我認為mpu6050可以接一個第三方
2019-04-30 06:36:15
)GNDpin 6 (GND)SCLpin 5 (SCL)SDApin 3 (SDA)通信協議實用I2C進行通信,詳情見 I2C serial communication protocol打開Jetson Nano,打開終端頁面sudo i
2022-02-10 06:35:11
你好!我使用的是Tiva C LaunchPad,EK-TM4C123GXL,欲根據Sensor Library中的API通過I2C MASTER DRIVER與MPU6050建立傳輸讀取數據供四軸
2018-08-15 06:48:35
mpu6050詳細源碼,配有電路圖以及初始化C語言程序。詳細的mpu6050中文資料!
2016-02-18 11:53:20 98
98 MPU6050原理圖,PDF格式,還蠻清晰。
2016-03-24 17:25:37108 MPU6050(硬件IIC)MPU6050(硬件IIC)
2017-04-02 16:29:3071 MPU6050模塊,如圖 1所示。該模塊集成了一片MPU6050芯片和一片STM8S003F3P6單片機,具有串口和I2C接口。MPU6050中的DMP(數字運動處理器)對姿態進行融合,STM8
2017-11-07 14:06:41 14002
14002 為避免糾纏于電路細節,我們直接使用集成的MPU6050模塊。MPU6050的數據接口用的是I2C總線協議,因此我們需要Wire程序庫的幫助來實現Arduino與MPU6050之間的通信。請先確認你的Arduino編程環境中已安裝Wire庫。
2017-11-07 14:25:066954 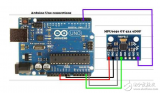
STM32F1的MPU6050模塊軟件卡爾曼濾波資料
2017-11-13 14:54:2021 本文介紹了mpu6050和mpu3050有什么不同和相同。分別介紹了mpu6050和mpu3050基礎以及特點,mpu3050是三軸陀螺傳感器,MPU6050內部整合了3軸陀螺儀和3軸加速度傳感器。
2017-12-11 15:41:5534848 本文主要介紹了mpu6050對應i2c地址是什么,并通過stm32的硬件讀取mpu6050的數據。MPU6050 的 I2C 地址是 0xD0H(11010000B)。I2C從器件有8位的地址,前7位由 WHO AM I確定,第8位由AD0的電平決定。
2017-12-11 16:04:1623368 
本文開始介紹了mpu6500的定義與MPU6500驅動總結,其次闡述了mpu6050的定義與mpu6050感測范圍,最后介紹了mpu6500和mpu6050的區別。
2018-03-08 09:54:0289692 本文開始對mpu9150進行了介紹,其次介紹了mpu6050的定義、mpu6050感測范圍以及mpu6050的特征,最后闡述了mpu9150和mpu6050區別。
2018-03-08 10:07:1141146 本文開始介紹了mpu6050的定義和mpu6050的感測范圍,其次闡述了mpu6050特征,最后介紹了mpu6050與單片機的連接方法。
2018-03-09 08:42:3325818 mpu6050常用作提供飛控運行時的姿態測量和計算。本文首先介紹了MPU6050姿態解算的原理,其次詳細的介紹了mpu6050姿態解算程序。
2018-03-09 09:15:2441958 此六軸模塊采用高精度的陀螺加速度計 MPU6050,通過處理器讀取 MPU650 的測量數據然后通過串口輸出,免去了用戶自己去開發MPU6050 復雜的 I2C 協議,同時精心的 PCB 布局和工藝保證了 MPU6050 收到外接的干擾最小,測量的精度最高。
2018-11-27 08:00:0028 最近,被安排調試MPU6050 模塊,之前從沒接觸過相關MEMS 傳感器, 所以感覺一頭霧水。幸好還有網絡, 還有強大的兄弟團的支持。不過, 很可惜,網上大部分資料只是簡單教你如何配置MPU6050
2019-07-24 16:27:0732 本文檔的主要內容詳細介紹的是使用MPU6050傳感器讀取I2C總線數據的程序免費下載。
2019-08-09 17:40:5315 MPU6050專用穩壓模塊的原理圖設計
2021-11-07 19:21:0037 實驗注意點:1.mpu6050是采用的I2C通信,所以我們需要將BOOT1和BOOT0置于0**才可正常通信,不可使用SPI模式進行,否則不可正常顯示。實驗mpu6050采用的是5v的供電電壓,...
2021-12-06 11:36:109 MPU6050簡介什么是MPU6050MPU6050的特點MPU6050框圖MPU6050初始化MPU6050—DMP使用介紹MPU6050—DMP使用DMP驅動庫驅動代碼硬件連接
2021-12-06 11:51:1167 stm32使用MPU6050讀取溫度值驗證I2C
2021-12-06 12:06:065 文章目錄引言簡述一下mpu6050和stm32的一些坑吧MPU6050 I2C讀寫MPU6050 初始化讀取內部溫度傳感器讀取陀螺儀DMP的移植讀取三軸角度引言最近玩了IMU模塊,看了很多的博客
2021-12-06 12:36:0714 I2C設備地址關系——以MPU6050舉例
2021-12-06 13:21:1110 GY-521模塊--MPU6050芯片學習(一)一、模塊介紹二、MPU6050MPU6050 的特點:MPU6050檢測軸示意圖MPU6050地址問題一、模塊介紹GY-521模塊實物:GY-521
2021-12-06 13:36:1231 基于MSP430處理器的 I2C總線讀取MPU6050傳感器數據
2021-12-06 13:36:1415 樹莓派I2C讀寫MPU6050不同方式效率對比? 近期在調整PID參數的時候,發現mpu6050濾波后的姿態嚴重滯后,查看該線程的周期時間,一次循環是16000us以上,頻率才60多HZ,調整
2021-12-06 14:06:071 文章目錄1、I2C總線1.1 I2C總線協議1.2 I2C總線讀寫操作1.3 STM32F0-I2C控制器特征2、MPU6050MPU6050的特性參數MPU6050的寄存器介紹MPU6050的設備
2021-12-06 14:06:0825 有MPU6050的例程,測試后很好用,如下圖(夢幻聯動一下:樹莓派PICO+freeRTOS)因為pico上有現成的能用的例程,所以改一改之后直接移植到linux上首先介紹一下linux下的I2C框架①、I2C 總線驅動,I2C 總線驅動就是 SOC 的 I2C 控制器驅動,也叫做 I2C 適配器
2021-12-06 14:21:0910 STM32 MPU6050 平衡車
2021-12-06 14:51:1061 MPU6050( )
2021-12-06 15:06:1123 C語言 | 基于STM32的MPU6050模塊程序(主程序)
2021-12-06 15:06:1250 K013 基于51/STM32 MPU6050測試 OLED0.96顯示原始數據一. 實現功能二. 硬件清單三. 資料清單四. MPU6050模塊簡介與通信協議1.基本參數2.引腳說明3.時序
2021-12-06 16:06:0929 方案介紹最靈敏的地震儀一般由電子傳感器制成,在這種情況下通常使用的是 MPU6050 模塊。該地震儀的核心是 MPU-6050 傳感器,在單個芯片中包含一個 3 軸 MEMS 加速度計
2022-12-14 17:28:192 本篇通過Renesas RA6M4開發板采用I2C讀取mpu6050傳感器的角加速度,角速度和溫度示例程序演示。
2023-01-17 09:07:283644 
 電子發燒友App
電子發燒友App









 工商網監
工商網監
評論