本文提出的基于CAN總線的ECU在線升級系統設計方案,切實可行,并已在Infineon XC2785A單片機上完成實際測試。Infineon XC2000單片機具有相同的內核,因此此方案將對這一
2015-08-07 13:58:27 2702
2702 
現在只能輸入顯示數字和字母,怎么顯示某個變量值所代表的數值呢多謝
2015-12-03 09:39:12
——在CAN網絡中,可以確保報文同時被所有的節點或者沒有節點接受,因此,系統的數據相容性是借助于成組和出錯處理達到的。(3),位速率:CAN的數據傳輸率在不同的系統中是不同的,而在一個系統中是固定
2014-04-27 15:16:02
在開發人員進行CAN總線相關裝置進行調試測試時,通常會采用CAN卡連接CAN網絡和PC電腦進行數據的采集、觀察和記錄。目前國內外有一些列配套的在線分析工具和軟件,但是價格昂貴。但長期以來,人們對采集
2020-01-05 11:22:13
今天做實驗,can總線上同時存在標準幀和擴展幀,從上位機上觀察到這樣的現象:標準幀可以正常接收,但是擴展幀時斷時時好??請大神們拍磚解釋啊
2024-02-05 07:41:27
相容性——在CAN網絡中,可以確保報文同時被所有的節點或者沒有節點接受,因此,系統的數據相容性是借助于成組和出錯處理達到的。(3),位速率:CAN的數據傳輸率在不同的系統中是不同的,而在一個系統中是固定
2014-04-18 16:36:30
總線上的節點都可以決定自己是否需要總線上的數據。市場上常用的收發器(例如: VP230、TJA1040、TCAN337等)多為ISO11898標準。在此標準中,對于CAN的信號邏輯1和0的產生:當
2019-07-01 19:20:56
報文。如果有兩個或兩個以上的節點同時發送報文,就會引起總線訪問碰撞。通過使用標識符逐位仲裁可以解決這個碰撞問題。而且當具有相同標識符的數據幀和遠程幀同時發送時,數據幀優先于遠程幀。6. 目前CAN總線
2021-05-13 06:00:00
市面上滿足國3~國5 排放標準的商用車,無一例外均應用CAN 總線網絡,進行整車VECU、發動機EECU、自動變速箱ECU、汽車組合儀表ECU、車輪防抱死制動ECU 之間的數據通訊。基于J1939 協議
2019-04-08 09:42:13
ECU( electronic control unit )即電子控制單元,泛指汽車上所有電子控制系統。隨著汽車電子自動化程度的越來越高,汽車零部件中也出現了越來越多的ECU參與其中,線路之間復雜程度也急劇增加。為了使電路簡單化,精細化,小型化,汽車電子中引進了CAN總線來解決這個問題。
2019-10-16 09:12:19
單片機在C語言環境可以用寫配置文件的方式保存一個變量值使其掉電不恢復初始嗎?
2014-12-24 19:51:57
我把一個斷點幾行后浮動變量,我想看。程序在斷點處停止,但根據監視窗口,變量值超出范圍。為什么價值超出范圍?3.30,XC32 V1.40,PIC32 MX795F521L,Windows 7
2019-08-05 12:05:25
我想用變量控制定時器周期。變量值是正確的,因為我在watch window里監控到了。但是變量在計時器設置中不起作用。因為當我在那里寫一個數字時,它就起作用了。關于這個問題有什么建議
2022-12-09 08:22:57
是在數據庫的基礎上建立的。這些節點間的通信可以完全被模擬和分析。在接下來的開發過程中,可使用真實ECU代替單個仿真節點。這種殘余總線和環境仿真為供應商提供了一個針對全系統和獨立ECU或模塊的開發和測試
2011-10-09 17:42:54
是這樣的我定義了幾個位域作為標志,在仿真時發現某個標志被語句賦值1之后,變量窗口看此標志的值是ERROR并不是賦值后的1為什么
2018-11-30 09:53:34
MSP430F5529LP寫一個1602或者12864顯示430內部變量值的問題 最好有基于5529 使用1602或者12864的具體執行操作的函數方法
2015-08-01 16:13:34
親愛的各位,我有一些困難來檢查MPLAB和諧中一些變量的值。所有變量的值為“null”或“0”。我不明白怎么回事。請檢查以下狀態:情況
2019-05-22 11:49:25
dataflash中的靜態變量值初始化會變嗎,怎么改變變量的值?
若系統啟動初始化時,不改變變量的值該怎么設變量?
2023-06-13 06:41:48
dataflash中的靜態變量值初始化會變嗎,怎么改變變量的值?
若系統啟動初始化時,不改變變量的值該怎么設變量?
2023-08-21 06:52:20
dataflash中的靜態變量值初始化會變嗎,怎么改變變量的值?
若系統啟動初始化時,不改變變量的值該怎么設變量?
2024-01-15 06:27:31
在2812中定義了unsigned char 變量為啥在仿真查看變量值的時候發現都是16位的呢
2018-11-14 10:43:03
是什么?這時還沒有進行寫入。這樣就會導致變量的值在一開始就錯了。如何解決這一問題?有人說,FLASH還沒被寫入數據時里面的值不是0x00就是0xFF,那么就可以通過判斷這個固定地址中的值是否為0x00或者0xFF,從而判斷是否為第一次開機另:產品所用CPU為STM32,用的stm32的內部flash
2018-08-31 14:57:07
xc2234l-20f MCU看門狗復位重啟后,全局變量值會清零嗎?還是保留原來的值
2024-02-05 06:56:25
,Node)都接在同一條線上。所有節點可以(盡管不應該)同時操作總線。CAN 是串行的,一般只需要 3 根線:CAN_H、CAN_L、GND。CAN_H與CAN_L差分傳送數據,物理上應該雙絞,而
2020-05-14 19:18:49
使用過codewarrior IDE的網友都知道,Codewarrior有一個很好的特性就是變量值可以直接在程序運行中查看,而且無需停止。但是目前免費的KDS直接點擊運行,在expressions
2016-06-23 14:10:08
串口輸出變量值一直是0或者一直不變。
用輸入捕獲實驗改的測距實驗,測距的時間可以正常輸出,但是距離經過運算公式之后就一直輸出是0,是咋回事啊。
2023-09-27 07:41:20
串口輸出變量值一直是0或者一直不變。用輸入捕獲實驗改的測距實驗,測距的時間可以正常輸出,但是距離經過運算公式之后就一直輸出不變,是咋回事啊。
2021-02-04 13:00:28
請問一下大家,用keil調試時有些變量值后面帶了一個分號和問號,或者是分號和字母o,這是什么意思啊? 另外,我們知道io口讀取按鍵時要把自己先拉高為1,如果沒拉高就讀的話,會帶來什么后果? 謝謝大家
2019-10-23 22:35:22
CAN 總線(Controller Area Network)是控制器局域網的簡稱,是 20 世紀 80 年代初德國 BOSCH 公司為解決現代汽車中眾多的控制與測試儀器之間的數據交換而開發的一種
2018-12-13 14:26:31
大神們,我發現在使用RTT studio的時候無法像keli這些開發工具一樣動態刷新監視的變量值,不知道怎么處理才能顯示?
2024-02-22 08:00:49
使用stm32時看不到flash中的初始化變量值是怎么一回事呢?
2022-12-01 07:33:35
不是動態修改(我多次弄錯導致麻煩了很多),而是按下按鍵后值定住,然后進行修改方法是保存下當前變量值,然后修改變量值即可,例如下面shi,fen,miao是讀正常模式下eeprom里的,...
2022-01-11 08:28:29
在利用UDE仿真器調試QSPI讀寫EEPROM過程中發現,單步運行能夠讀取到數據,如果全速運行,示波器中讀取數據正確,但仿真器中觀察到的全局變量值不對,沒有讀到數據。請問有人遇到過嗎,如何解決?
2024-02-18 08:14:20
本文為大家總結了一篇基于 STM32 和 CAN 總線的溫度監控系統的設計,通過上位機與下位機的通信,實現對溫度數據的監控,并經初步實驗達到了設計的要求。1 系統總體方案概述系統總體框圖如圖 1
2020-05-30 08:00:00
。另一方面,neoVIFIRE的多通道功能可以同時記錄汽車動力CAN總線上的實車數據(DBC解析后的),比如車速、發動機轉速、里程等等動力CAN相關的數據。為電動汽車電池的研究和提升電池驅動能力提供多方面
2014-08-25 13:55:38
世紀80年代德國Boech公司為汽車的監控、控制系統而設計的,主要是解決汽車中的電子控制裝置之間的通信,減少不斷增加的信號線。CAN總線的直接通信距離最遠可以達到10 km,此時通信速率為5 kbps
2018-11-13 10:38:08
小編為大家總結了一篇基于 STM32 和 CAN 總線的溫度監控系統的設計,通過上位機與下位機的通信,實現對溫度數據的監控,并經初步實驗達到了設計的要求。1 系統總體方案概述系統總體框圖如圖 1
2021-08-19 07:31:59
有沒有做這方面工作的朋友啊?請指導一下應該從哪些方面入手啊1、想實現用周立功采集CAN總線數據2、總線上不同網絡的信號數據采集3、不同網絡上的數據可以同時采集4、可以選擇不同波特率的
2019-02-24 20:19:47
如何利用keil設置變量值改變時調試斷點?
2021-12-24 07:13:14
: goodbye (假設新值被接收并存儲在esp8266的變量中)這樣當客戶端再次加載頁面時,將出現模式 2 的數據,這是已修改和保存的數據,而不是默認情況下模式 1 的數據。如何在 html 文本中嵌入變量值以修改單選按鈕和輸入框文本的選擇。
2023-02-24 06:03:42
,如果可以使用手機通過WiFi連接CAN bus設備,那么我們就可以擺脫筆記本電腦使用手機來調試和監控CAN bus設備。那么,如何能使CAN現場控制總線網絡與無線網絡轉換,由于CAN總線協議數據
2016-07-22 15:25:57
問題日益突出,總線故障潛在問題極其嚴重。那么,如何保證CAN總線穩定,為何主機廠愈來愈重視CAN一致性測試?如何解決CAN總線測試問題呢?CAN一致性測試,就是要求整車CAN網絡中的節點都滿足CAN總線節點
2019-04-26 10:52:24
已經使用了常規調試工具來停止執行并顯示選定變量的當前值,但這對理解反饋回路的操作幾乎沒有幫助。我真正想要的是在不停止執行的情況下捕獲一些變量值,或者至少不會造成太多的執行延遲。考慮到SWDIO
2019-09-10 12:58:40
我想把一個變量的值輸入到一個一維數組中,該怎么做呢?例如:數組的第二個值就代表輸入的變量值吧
2016-05-17 14:04:58
大神們,我發現在使用RTT studio的時候無法像keli這些開發工具一樣動態刷新監視的變量值,不知道怎么處理才能顯示?
2023-09-03 11:56:59
,世界各國都在從減小發動機排量、提高發動機技術、發展新能源汽車等各個方面入手以降低燃油消耗。發動機是汽車中主要的耗油部件,但眾多的ECU也是隱藏的“油耗大戶”。圖1 汽車擁堵二、CAN總線簡介ECU
2019-05-10 04:23:39
系統狀態。但Debugger仿真器在使用上也有不足的地方,需要在程序中設置斷點,程序運行到斷點處停止,才能看到更新的變量值,影響系統的正常運行。 CAN總線解析工具 工程師需要使用CAN總線
2018-12-27 15:09:09
我用Labview去訪問歐姆龍OPC服務器,已經綁定各個變量,在Client和服務器上顯示的數值都是一樣的,但用labview做的VI顯示的的都共享變量值都是零,同一臺電腦上,請高手指出問題出在哪?
2014-02-26 17:22:35
作者:Xiaomin 概述 CAN(Controller Area Network)總線協議是由 BOSCH 發明的一種基于消息廣播模式的串行通信總線,它起初用于實現汽車內ECU之間可靠的通信,后
2019-07-26 08:33:27
使用 SWD 調試時,如果我在斷點處停下來檢查變量值,則變量值以十進制顯示。這真的很煩人。當我將鼠標懸停在變量值上時,如何更改環境以永久顯示十六進制變量值?我在監視窗口中沒有變量。我意識到如果變量在監視窗口中,我可以更改數字格式。但這意味著將每個變量都添加到監視窗口中。
2023-02-01 07:52:26
freertos中的任務1中定義的局部變量在任務1被切換出后,再從其他任務2調度回任務1,這個時候任務1的局部變量值能恢復原來的值嗎?
2020-07-18 08:00:51
請問如何在主程序中讀取中斷中改變全局變量值?例如u16 var;void isr(void){var++;}void main(void){di();//關總中斷u16 tmp = var;ei
2020-03-17 00:36:26
軟件調試模式(仿真模式)2上一篇簡單介紹了軟件調試模式中幾個比較常用的按鈕,這次就具體了解查看I/O口電平變化和變量值地變化我們先將硬件I/O口模擬器打開,它就會彈出如下窗口串口里面現實的就是模擬
2022-02-24 06:32:10
行業,用于CAN總線監控,CAN總線測試與分析,CAN總線仿真,ECU刷寫等方面。 免費的編程接口PCAN-Basic API,提供了C
2021-12-28 17:59:33
介紹CAN 總線及其通信協議J1939, 并設計基于CAN 總線的多ECU 通信平臺的硬件結構; 闡述節點ECU 通信的軟件設計方法,在仿真試驗的條件下實現數據通信的功能。試驗表明該平臺運行
2009-04-15 09:49:53 22
22 介紹CAN 總線及其通信協議J1939, 并設計基于CAN 總線的多ECU 通信平臺的硬件結構; 闡述節點ECU 通信的軟件設計方法,在仿真試驗的條件下實現數據通信的功能。試驗表明該平臺運行
2009-05-16 14:19:0828 本文介紹了一種基于CAN總線的網絡監控系統方案。該方案使用CAN卡和DSP中的CAN模塊作為上下位機通信接口,研究了CAN通信協議模型,VC++與CAN卡的通信接口,DSP中CAN模塊通信的數據處
2009-06-01 15:32:2227 鑒于目前基于RS-485通信的監控系統的一些問題,本文闡述了用微控制器P87C591和現場總線技術實現基于CAN總線的監控系統,還詳細說明了RS-232與CAN總線轉換器和基于CAN總線的云臺控制
2009-07-09 10:06:4736 根據遠程火災信息數據采集和傳輸的特點,提出了一種基于CAN 總線和嵌入式網關的火災遠程監控系統的總體框架設計方案。該方案使用CAN 總線實現火災遠程監控系統數據采集終端
2009-12-23 16:31:2154 摘要:介紹CAN總線及其通信協議J1939,并設計基于CAN總線的多ECN通信平臺的硬件結構;闡述節點ECN通信的軟件設計方法,在仿真試驗的條件下實現數
2006-03-11 13:21:031634 
CAN總線在機車監控系統中的應用
以Philips公司的SJA1000為例,介紹了CAN現場總線的特點,控制器的功能、結構和CAN2.0B總線協議的基本內容,闡述了一
2009-05-04 22:36:281005 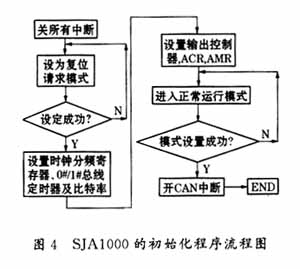
以Philips公司的SJA1000為例,介紹了CAN現場總線的特點,控制器的功能、結構和CAN2.0B總線協議的基本內容,闡述了一個基于CAN總線的火車機車監控系統,及其系統性能要求、系統硬
2009-05-09 11:59:42914 
基于CAN總線的變頻設備遠程監控系統的實現
CAN總線介紹:
CAN總線有以下特點:
2009-10-10 08:56:30665 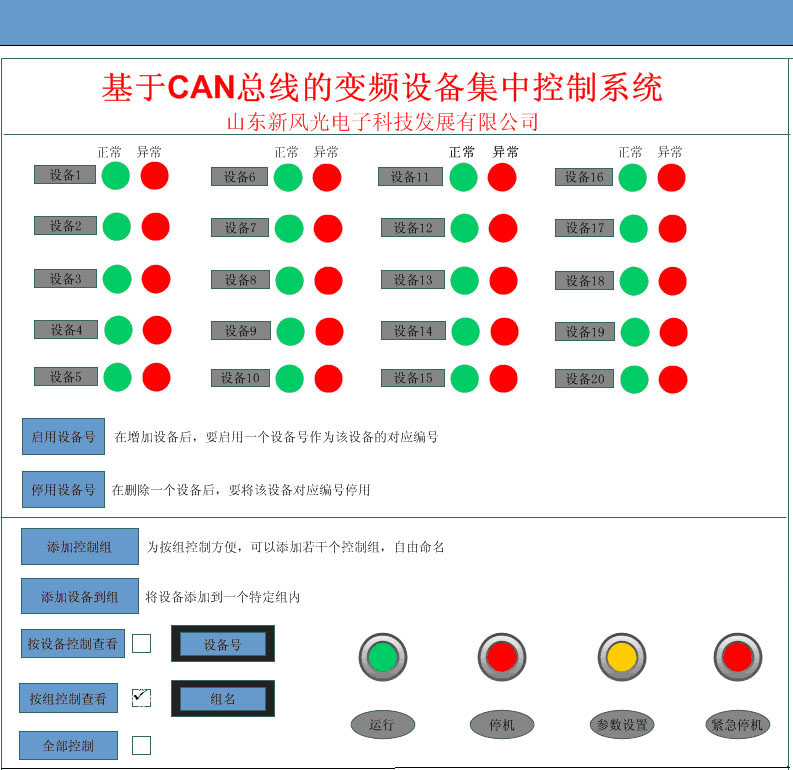
基于CAN總線的懸浮控制器監控終端的設計
CAN總線是德國Bosch公司為解決現代汽車中多傳感器和控制器之間的數據交換而開發的一種串行總線。由于它通信速率高、通信
2010-01-25 16:25:04608 
CAN總線在張緊器驅動監控系統中的應用
鋪管船用張緊器是海底油氣管道鋪設的關鍵配套設備,由夾緊系統、驅動系統、監控系統組成,我國從上世紀 90年代開始鋪管船
2010-03-13 09:51:52581 
本設計中,手柄ECU可以通過CAN總線向AMT_ECU傳遞駕駛員的駕駛意圖,AMT的ECU根據手柄ECU所傳遞的報文信息控制變速器進行換擋動作。同時,AMT的ECU也可以通過CAN總線把變速器的當前狀態
2011-08-18 11:20:062760 
基于CAN總線汽車電子控制單元(ECU)的集成電路設計基于CAN總線汽車電子控制單元(ECU)的集成電路設計基于CAN總線汽車電子控制單元(ECU)的集成電路設計基于CAN總線汽車電子控制單元(ECU)的集成電路設計
2016-03-04 14:59:5528 基于CAN總線的逆變電源監控技術的設計。
2016-03-28 15:17:5417 基于CAN總線與ZigBee的現場監控系統設計。
2016-05-06 14:37:5022 基于CAN總線的變電站監控系統
2017-02-07 18:09:2015 基于CAN總線的隧道環境監控系統的研究
2017-09-25 13:25:005 CAN總線的嵌入式車燈監控系統設計
2017-10-31 11:18:5014 CAN總線的物理層是將ECU(Electronic Control Unit-電子控制單元,又稱“行車電腦”、“車載電腦”等)連接至總線的驅動電路。ECU的總數將受限于總線上的電氣負荷。物理層定義
2020-08-14 11:29:137853 采用USB和CAN總線的電力監控數據采集系統。
2021-04-20 09:43:0014 在 TIA Portal 中,可以在程序段中創建用戶程序時直接創建變量。 以下步驟介紹了如何定義 PLC 變量以及將插入的 LAD 指令與 PLC 變量互連。LAD 指令根據變量值執行,以此來控制機器的啟動和關閉。
2022-04-27 16:10:021978 控制器局域網(CAN)于1992年就被定為了國際標準。毫無疑問,CAN是目前應用最為廣泛的串行總線系統,它甚至可以在一輛車上被多次使用:一個最高傳輸速率為125kbps的低速CAN總線系統(容錯
2022-11-08 10:48:181762 控制器局域網絡系統(CAN總線系統):由多個電,子控制單元(ECU)同時控制多個工作裝置或系統,各控制單元(ECU)的共用信息通過總線互相傳遞。
2023-05-05 11:53:03818 
什么是CAN總線?
CAN (Controller Area Network)是二十世紀八十年代初德國Bosch公司為解決現代汽車中眾多電控單元( ECU )之間的數據交換而開發的一種單工串行通信協議。
2023-05-16 14:31:54757 
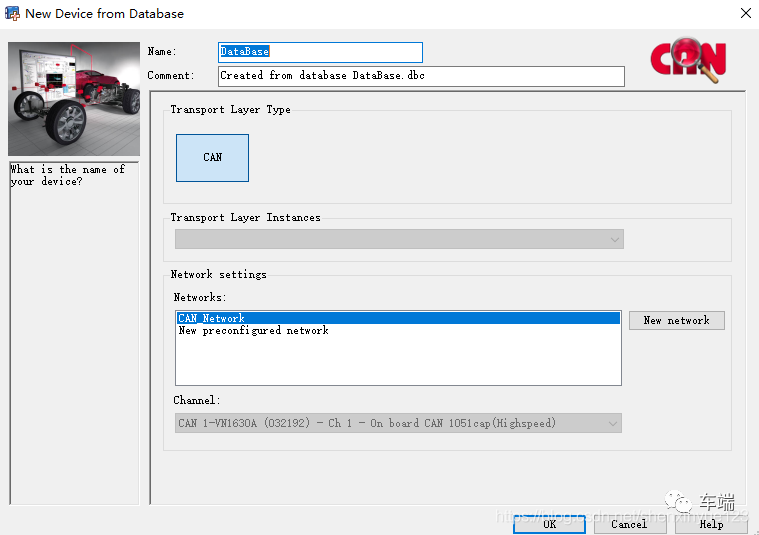
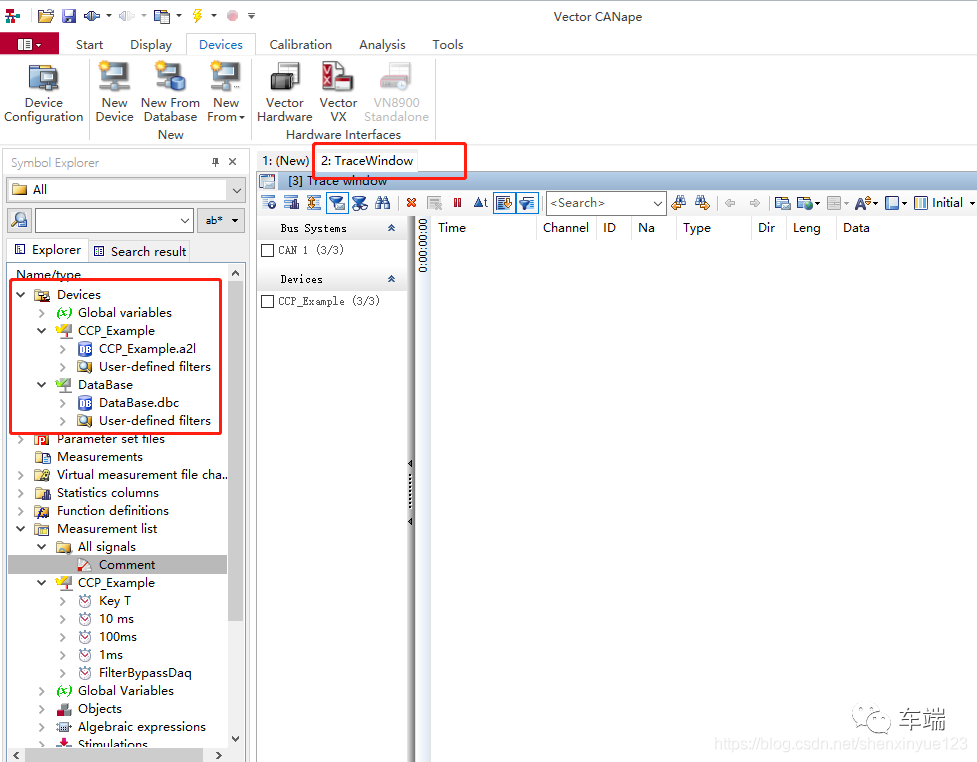
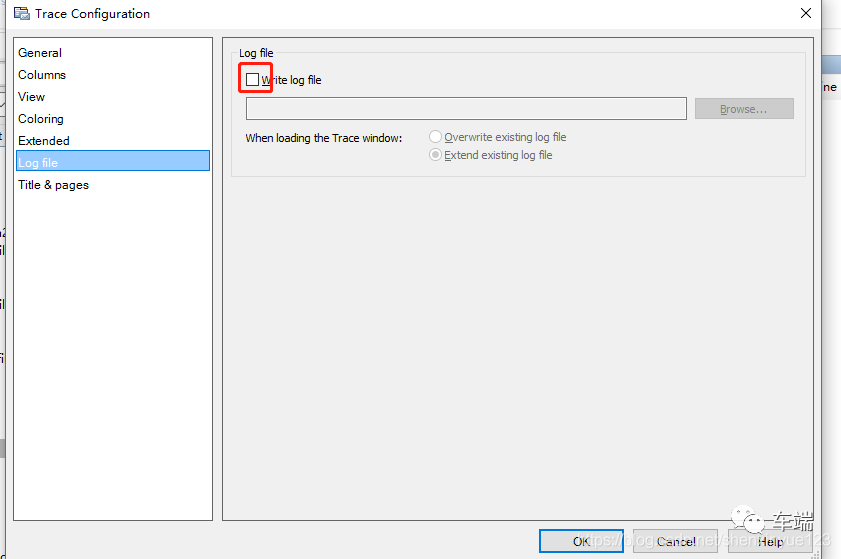
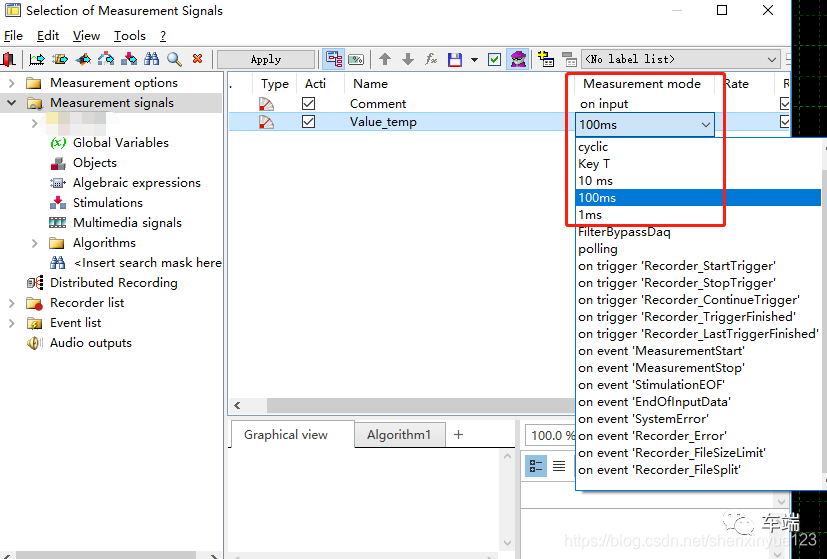
CANape是一款可用于ECU測量、ECU標定、ECU診斷以及ADAS傳感器數據記錄驗證的綜合性工具軟件,本文介紹CANape19新版本特點。
2022-08-01 14:13:39740 
CANape推出新功能Simulink XCP Server,針對Simulink模型以及ECU內部數據的參數化和可視化,讓模型調參變得簡單。
2022-08-01 15:00:05652 
。? ? ? 在 WinCC 中使用外部變量采集過程值,并訪問所連接的自動化系統中的內存地址。內部變量沒有鏈接到任何過程,只可用于相關聯的 HMI 設備。 外部變量值和內部變量值可保存在數據日志中。為每個變量創建一個記錄變量,并指定要保存該變量的日志。 數據記
2023-07-03 11:32:132366 
CAN作為汽車ECU之間廣泛應用的通信總線,有一些和應用相關的基礎問題。
2023-08-19 09:38:052716 
can總線為什么要用雙絞線?can總線不用雙絞線可以嗎? CAN總線是一種數據通信協議,廣泛用于汽車、航空、船舶、工業自動化、機器人等領域。CAN總線采用串行通信方式,主要用于實現多個模塊之間的通信
2023-09-14 16:48:053603 本文展示使用CANape控制OUT MiniModule輸出可調節占空比的PWM波的方法,CANape通過VN1610接口卡收發器發送CAN報文到總線上,OUT MiniModule收到報文后根據
2023-10-07 22:20:47563 
越來越多的ECU之間的數據的相互交換,早期的網絡結構已經不能滿足現有的需要, CAN總線應運而生。
2023-12-04 17:05:39114 
 電子發燒友App
電子發燒友App









 工商網監
工商網監
評論