本文提出的基于CAN總線的ECU在線升級系統(tǒng)設(shè)計方案,切實可行,并已在Infineon XC2785A單片機上完成實際測試。Infineon XC2000單片機具有相同的內(nèi)核,因此此方案將對這一
2015-08-07 13:58:27 2703
2703 
各位工程師在工業(yè)通訊現(xiàn)場最擔(dān)心遇到什么?通信干擾!CAN隔離模塊能夠有效解決CAN總線通信干擾問題,且較分立器件方案使用更簡便。本文為大家總結(jié)CAN隔離模塊在使用中需要注意的細(xì)節(jié),幫助大家搭建更可靠的CAN總線網(wǎng)絡(luò)。
2017-11-13 14:16:3039379 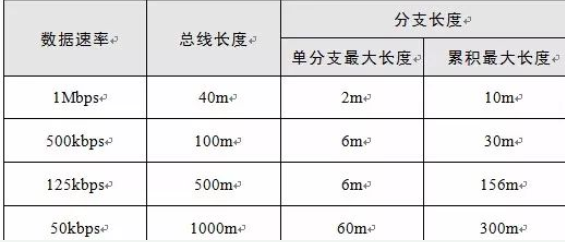
MCS-51單片機組成CAN通信系統(tǒng)需要擴展CAN控制器,本系統(tǒng)采用的CAN控制器是SJA1000。SJA1000是PHILIPS公司生產(chǎn)的既支持CAN 2.0B,又支持CAN 2.0A的CAN
2019-01-09 08:23:005734 
這意味著變送器通過CAN收發(fā)器改變總線電平,并將其信息傳輸?shù)?b class="flag-6" style="color: red">CAN總線。接收器通過監(jiān)測總線電平將總線上的信息讀取到自己的CAN收發(fā)器中。
2024-02-19 14:53:54606 
,CAN有很好的效驗機制,這些都保證了CAN通信的可靠性。2 CAN總線協(xié)議內(nèi)容 CAN總線的物理層是將ECU連接至總線的驅(qū)動電路。ECU的總數(shù)將受限于總線上的電氣負(fù)荷。物理層定義了物理數(shù)據(jù)在總線上各節(jié)
2014-04-27 15:16:02
參照 ISO/OSI 標(biāo)準(zhǔn)模型,CAN 總線的通信參考模型如圖 9-1 所示。這 4 層結(jié)構(gòu)的功能如下:? 物理層規(guī)定了節(jié)點的全部電氣特性,在一個網(wǎng)絡(luò)里,要實現(xiàn)不同節(jié)點間的數(shù)據(jù)傳輸,所有節(jié)點的物理層
2018-12-14 14:17:02
,CAN有很好的效驗機制,這些都保證了CAN通信的可靠性。2 CAN總線協(xié)議內(nèi)容 CAN總線的物理層是將ECU連接至總線的驅(qū)動電路。ECU的總數(shù)將受限于總線上的電氣負(fù)荷。物理層定義了物理數(shù)據(jù)在總線
2014-04-18 16:36:30
。 問題1:ARM用戶板(節(jié)點1,收發(fā)器:tcan337)與ECU(節(jié)點2,收發(fā)器:vp230)兩節(jié)點可以正常進行CAN通信,但是當(dāng)總線上加入第3個節(jié)點PC端(節(jié)點3,USB轉(zhuǎn)CAN模塊,收發(fā)器
2019-07-01 19:20:56
IICSPICAN485USB工業(yè)以太網(wǎng)EtherCATEtherCAT傳輸性能EtherCAT應(yīng)用層協(xié)議層CoE協(xié)議現(xiàn)場總線最近的實驗需要較高的運動控制速率。市場上大部分的驅(qū)動板目前只支持CAN通信。畢竟CAN通信配置簡單
2021-08-06 07:44:19
控制器區(qū)域網(wǎng)(Controller Area Metwork,CAN)總線是一種多主機局部網(wǎng)。CAN總線規(guī)范已被國際標(biāo)準(zhǔn)化組織(ISO)制定為國際標(biāo)準(zhǔn)。C-AN總線屬于總線式串行通信網(wǎng)絡(luò),由 于采用
2011-07-12 15:33:41
應(yīng)用最廣泛的現(xiàn)場總線之一。在北美和西歐,CAN總線協(xié)議已經(jīng)成為汽車計算機控制系統(tǒng)和嵌入式工業(yè)控制局域網(wǎng)的標(biāo)準(zhǔn)總線,并且擁有以CAN為底層協(xié)議專為大型貨車和重工機械車輛設(shè)計的J1939協(xié)議。CAN總線的特點(1)多主機方式工作:網(wǎng)絡(luò)上任意節(jié)點可在任意時刻其他節(jié)點發(fā)送數(shù)據(jù),通信方式靈活;(2)網(wǎng)絡(luò)上...
2022-01-13 07:52:18
前言CAN總線的應(yīng)用在現(xiàn)在看來越來越廣泛,我廠設(shè)備從最初的ARM9與ARM7平臺、期間升級過度到CortexA8與Cortex M3平臺,再到現(xiàn)在的Cortex M4平臺,圍繞CAN進行了一系列
2021-07-27 06:18:35
10km,無損位仲裁機制,多主結(jié)構(gòu)。近些年來,CAN控制器價格越來越低。 ? 低成本:ECUs通過單個CAN接口進行通信,布線成本低。 ? 高集成:CAN總線系統(tǒng)允許在所有ECUs上進行集中錯誤診斷和配置。 ? ...
2022-01-12 06:08:19
這里為大家整理了最近發(fā)布的關(guān)于CAN總線相關(guān)知識的文章,希望對大家有所幫助。1、什么是CAN?控制器局域網(wǎng)(CAN)是一種串行通信總線,旨在在惡劣的環(huán)境下,尤其是工業(yè)和汽車應(yīng)用中實現(xiàn)強大而靈活的性能
2020-10-03 07:17:44
于CAN 總線通訊平臺的設(shè)計之中。 應(yīng)用方案:使用NI LabVIEW 軟件開發(fā)平臺和PXI 模塊化儀器系統(tǒng)中的CAN 通訊模塊,創(chuàng)建過濾 識別J1939 協(xié)議報文標(biāo)識符ID 及多幀報文按協(xié)議
2019-04-08 09:42:13
CAN做為應(yīng)用比較廣泛的通信總線,受到了越來越多的客戶喜歡和青睞,廣泛應(yīng)用于工業(yè)和汽車,常見的高層協(xié)議有CANopen,J1939,DeviceNet等,在公眾號曾經(jīng)分享過超過15篇有關(guān)C...
2021-08-31 07:49:37
CAN做為應(yīng)用比較廣泛的通信總線,受到了越來越多的客戶喜歡和青睞,廣泛應(yīng)用于工業(yè)和汽車,常見的高層協(xié)議有CANopen,J1939,DeviceNet等,在公眾號曾經(jīng)分享過超過15篇有關(guān)C...
2021-08-31 07:14:53
ECU( electronic control unit )即電子控制單元,泛指汽車上所有電子控制系統(tǒng)。隨著汽車電子自動化程度的越來越高,汽車零部件中也出現(xiàn)了越來越多的ECU參與其中,線路之間復(fù)雜程度也急劇增加。為了使電路簡單化,精細(xì)化,小型化,汽車電子中引進了CAN總線來解決這個問題。
2019-10-16 09:12:19
情況是這樣的,因為項目中需要外接的串口設(shè)備很多,STM32F4的6個UART/USART已經(jīng)都被占用完了,如果想繼續(xù)接入串口設(shè)備,只能通過【can串口】轉(zhuǎn)換模塊來實現(xiàn),而且由于can總線支持N多
2021-08-19 07:14:58
CAN卡又叫做CAN總線分析儀,同星TOSUN智能科技又對它進行細(xì)致分類,USBCAN卡,CAN總線網(wǎng)關(guān),CAN總線轉(zhuǎn)換器等等。主要功能就是起著通信協(xié)議轉(zhuǎn)換的作用,使設(shè)備之間傳輸無障礙,順利收發(fā)
2022-08-10 11:33:54
STM32 CAN總線通信學(xué)習(xí)筆記(一)一、CAN總線簡介CAN 是控制器局域網(wǎng)絡(luò)(Controller Area Network, CAN)的簡稱。CAN采用數(shù)據(jù)塊編碼的方式,數(shù)據(jù)塊根據(jù)幀的類型
2021-08-19 06:04:04
數(shù)據(jù)至上位機顯示已接收到的數(shù)據(jù);RCC:復(fù)位及時鐘控制模塊,用于初始化STM32 外設(shè)時鐘及設(shè)置CAN總線通信的波特率;GPIO:通用輸入輸出口;NVI
2021-08-20 06:30:40
stm32的can總線理解及應(yīng)用——程序?qū)?yīng)stm32f103系列CAN 是Controller Area Network 的縮寫(以下稱為CAN),是ISO國際標(biāo)準(zhǔn)化的串行通信協(xié)議。它的通信速度
2021-08-19 06:26:04
歷史舞臺。車載以太網(wǎng)技術(shù)的發(fā)展為高帶寬提供了可能性,但車載以太網(wǎng)由于其點對點通信和非實時的協(xié)議特性使其無法滿足車控功能對高實時性和一對多通信的需求,而 CAN-FD 基于傳統(tǒng)CAN 的核心特征,繼承了總線
2023-02-14 14:22:23
、實時性和靈活性方面具有獨特的技術(shù)優(yōu)勢,主要特點如下:? CAN 總線是一種多主總線,總線上任意節(jié)點可在任意時刻主動地向網(wǎng)絡(luò)上其他節(jié)點發(fā)送信息而不分主次,因此可在各節(jié)點之間實現(xiàn)自由通信。? CAN
2018-12-13 14:26:31
基于FPGA的CAN總線通信系統(tǒng)
2012-08-17 16:34:13
基于FPGA的CAN總線通信系統(tǒng)為了克服單片機固有的缺陷, 滿足航天控制的需求, 文章提出了如何利用FPGA采用查詢的方式控制CAN控制器SJA1000,從而實現(xiàn)CAN總線數(shù)據(jù)通信的方法; 介紹了
2012-08-11 11:55:19
說明:這是我的畢業(yè)設(shè)計,基于STM32的CAN總線通信節(jié)點設(shè)計。用的是STM32F103微控制器,LCD1602液晶顯示,MQ-4甲烷氣體傳感器,CTM1050CAN收發(fā)器。但是甲烷傳感器限于條件
2021-07-19 07:18:56
在開發(fā)板上有CAN總線,怎樣來進行CAN總線的通信呢?希望能普及一下這方面的知識或者提供些相關(guān)的例程。如果有高手做過,請介紹一下開發(fā)的過程。
2019-09-30 04:35:02
其他信號質(zhì)量,憑借高通道數(shù)量、FlexChannel 輸入通道和大高清顯示器,5 系列 MSO 尤其適合查看復(fù)雜 ECU。 ECU 通過 CAN、LIN 和其他總線通信并與傳感器和執(zhí)行器直接通信5系列
2019-04-26 10:52:24
及實時響應(yīng)的場合,單通道CAN總線不能滿足實際通信的要求。那么,我們究竟該如何設(shè)計多通道實時CAN總線模擬器呢?
2019-08-13 07:44:51
針對系統(tǒng)通信可靠、實時性的要求,在交直流埋弧焊接通信控制中,提出了一種基于DSP的CAN總線通信控制方案,介紹了交直流埋弧焊電源系統(tǒng)結(jié)構(gòu)原理的設(shè)計,并對基于DSP的CAN總線通信的協(xié)議設(shè)計、硬件電路設(shè)計以及軟件設(shè)計進行了較詳細(xì)說明,同時還提出了一種多幀數(shù)據(jù)準(zhǔn)確通信的方案。
2021-05-28 06:31:48
電動汽車的ECU進入休眠后,目前有3種喚醒模式,我想知道CAN總線和AC電壓的喚醒設(shè)計原理是什么?
2024-02-02 06:19:50
作者:Xiaomin 概述 CAN(Controller Area Network)總線協(xié)議是由 BOSCH 發(fā)明的一種基于消息廣播模式的串行通信總線,它起初用于實現(xiàn)汽車內(nèi)ECU之間可靠的通信,后
2019-07-26 08:33:27
介紹CAN 總線及其通信協(xié)議J1939, 并設(shè)計基于CAN 總線的多ECU 通信平臺的硬件結(jié)構(gòu); 闡述節(jié)點ECU 通信的軟件設(shè)計方法,在仿真試驗的條件下實現(xiàn)數(shù)據(jù)通信的功能。試驗表明該平臺運行
2009-04-15 09:49:53 22
22 基于CAN的OSEK COM規(guī)范研究與實現(xiàn)::OSEK/VDX是汽車電子行業(yè)的重要標(biāo)準(zhǔn),其中的通信規(guī)范OSEKCOM是ECU之間和ECU內(nèi)部傳遞信息的統(tǒng)一平臺。OSEK COM可以基于CAN總線實現(xiàn),但具體接口和行
2009-04-21 22:00:0918 介紹CAN 總線及其通信協(xié)議J1939, 并設(shè)計基于CAN 總線的多ECU 通信平臺的硬件結(jié)構(gòu); 闡述節(jié)點ECU 通信的軟件設(shè)計方法,在仿真試驗的條件下實現(xiàn)數(shù)據(jù)通信的功能。試驗表明該平臺運行
2009-05-16 14:19:0828 本文針對賓館、酒店的客房控制和管理系統(tǒng),介紹了基于CAN 總線的客房通信控制器的硬件電路結(jié)構(gòu)、原理及軟件結(jié)構(gòu)和主程序流程。關(guān)鍵詞:CAN 總線;現(xiàn)場總線;通信技術(shù);樓
2009-06-13 12:06:0313 鑒于目前基于RS-485通信的監(jiān)控系統(tǒng)的一些問題,本文闡述了用微控制器P87C591和現(xiàn)場總線技術(shù)實現(xiàn)基于CAN總線的監(jiān)控系統(tǒng),還詳細(xì)說明了RS-232與CAN總線轉(zhuǎn)換器和基于CAN總線的云臺控制
2009-07-09 10:06:4736 本設(shè)計為光電穩(wěn)定跟蹤平臺開發(fā)CAN 驅(qū)動,以實現(xiàn)CAN 總線上設(shè)備間的通信。分析了linux 下標(biāo)準(zhǔn)設(shè)備驅(qū)動機制和CAN 總線通信模型,給出了光電穩(wěn)定跟蹤平臺中CAN 總線通信的硬件設(shè)計
2009-08-04 08:33:4830 CAN總線(Controller Area Network)即控制器局域網(wǎng),是國際上應(yīng)用最廣泛的現(xiàn)場總線之一。起先,CAN總線被設(shè)計作為汽車環(huán)境中的微控制器通訊,在車載電子控制裝置ECU之間交換信息,形
2010-07-19 15:34:3325 CAN總線通信電路
2008-10-14 13:59:176323 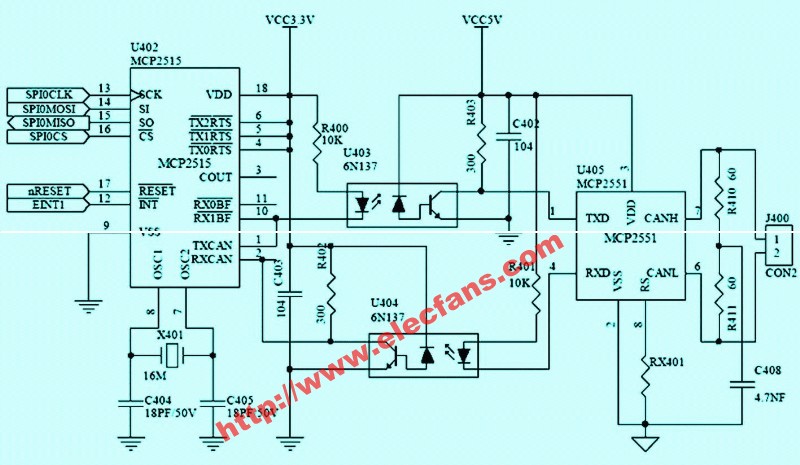
基于CAN總線的RS-232串口設(shè)備遠(yuǎn)程通信
闡述了CAN總線在232串口設(shè)備遠(yuǎn)程通信或自組網(wǎng)絡(luò)中的應(yīng)用,介紹了CAN到RS-232轉(zhuǎn)換裝置的軟硬件設(shè)計方法。重點
2009-09-27 16:07:381337 
Linux環(huán)境下實現(xiàn)基于ARM9的CAN總線通信
1. 引言CAN(Controller Area Network)總線最早是由德國BOSCH公司提出,實現(xiàn)汽車環(huán)境中的微控制器通訊,在車載各電子控制裝置ECU之間
2009-11-03 09:56:15578 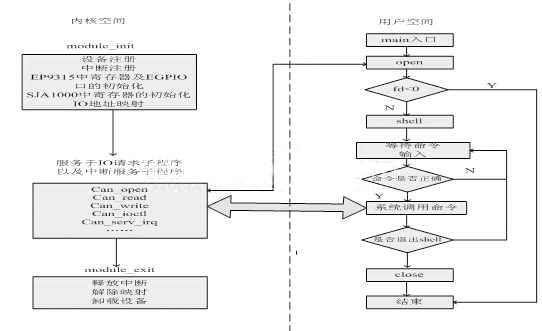
CAN總線通信硬件原理圖(采用TJA1050T CAN總線驅(qū)動器)
F040中內(nèi)置CAN總線協(xié)議控制器,只要外接總線驅(qū)動芯片和適當(dāng)?shù)目垢蓴_電路就可以很方便地建立一
2009-11-13 12:18:1432972 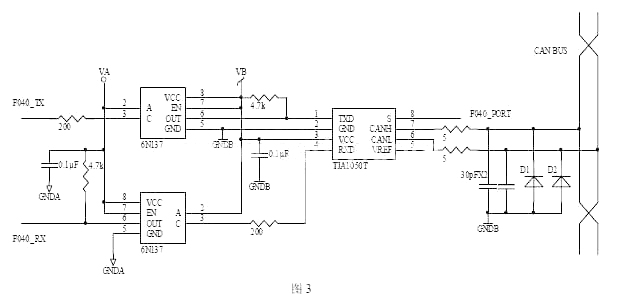
CAN總線與RS-485總線的通信接口設(shè)計
1 CAN總線及RS-485總線簡介 CAN總線(Controller Area Network)是由德國Bosch公司于20世紀(jì)80年代專門為汽車電子控制系統(tǒng)
2010-01-27 10:46:074197 
以MOTOROLA公司的MPC555為動力總成ECU的核心拉制器,研究CAN總線在汽車動力總成控制系統(tǒng)中的具體應(yīng)用。CAN總線以其可靠性高、杭干擾能力強等特點,成為現(xiàn)代汽車內(nèi)部通信網(wǎng)絡(luò)的首選。
2011-09-21 16:35:3753 設(shè)計了多個CAN總線的通信節(jié)點,通過PCI9810-CAN適配卡上的CAN總線,組成一個局域通信網(wǎng)絡(luò),實現(xiàn)了PC機對各個節(jié)點的監(jiān)控和通信以及節(jié)點間的自由通信。
2011-10-19 14:57:5667 基于對CAN 總線控制器的功能分析, 并應(yīng)用Verilog語言進行軟件設(shè)計, 從而實現(xiàn)CAN節(jié)點之間的通信功能。
2012-04-28 09:56:5413818 
基于CAN總線系統(tǒng)結(jié)構(gòu)構(gòu)成,通過工程實踐的具體應(yīng)用以及對CAN控制器及收發(fā)器硬件結(jié)構(gòu)的深入理解,并從通信的角度出發(fā)著重深入分析了CAN總線通信的節(jié)點同步機制、總線地址機制、總
2012-05-08 15:23:04404 基于CAN總線汽車電子控制單元(ECU)的集成電路設(shè)計基于CAN總線汽車電子控制單元(ECU)的集成電路設(shè)計基于CAN總線汽車電子控制單元(ECU)的集成電路設(shè)計基于CAN總線汽車電子控制單元(ECU)的集成電路設(shè)計
2016-03-04 14:59:5528 CAN總線通信詳解。
2016-03-30 16:46:100 基于FPGA的CAN總線通信系統(tǒng),下來看看。
2016-05-10 11:47:1334 CAN-bus現(xiàn)場總線基礎(chǔ)方案_通信
2017-02-07 17:16:4012 基于CAN總線的EPS通信系統(tǒng)研究
2017-01-14 11:27:1217 基于雙CAN總線的數(shù)字伺服通信協(xié)議
2017-09-01 14:25:428 CAN總線通信協(xié)議的分析和實現(xiàn) CAN總線通信協(xié)議以及其實現(xiàn)方法
2017-09-04 08:45:3340 CAN(Controller Area Network)總線協(xié)議是由 BOSCH 發(fā)明的一種基于消息廣播模式的串行通信總線,它起初用于實現(xiàn)汽車內(nèi)ECU之間可靠的通信,后因其簡單實用可靠等特點,而廣泛應(yīng)用于工業(yè)自動化、船舶、醫(yī)療等其它領(lǐng)域。
2017-09-19 11:08:3122 在各種現(xiàn)場總線中,CAN總線以其結(jié)構(gòu)簡單、應(yīng)用靈活方便而在工業(yè)過程控制和車輛中得到廣泛應(yīng)用。在CAN的技術(shù)規(guī)范中,規(guī)定了CAN分為數(shù)據(jù)鏈路層和物理層兩層,用戶在設(shè)計通信軟件時,必須先根據(jù)需求設(shè)計合適
2018-01-08 15:01:029 性能的優(yōu)劣。面對日趨多樣的ECU和通信總線類型,開發(fā)一種支持多總線的、通用靈活的標(biāo)定系統(tǒng),具有非常高的實用價值[1]。目前,CAN總線作為一種可靠的汽車總線已經(jīng)廣泛應(yīng)用于高檔汽車,因而多數(shù)標(biāo)定系統(tǒng)都是
2018-06-20 14:29:009635 
CAN(Controller Area Network)是由ISO定義的一種串行通信總線,它是一種能有效地支持高安全等級的分布實時控制的新一代網(wǎng)絡(luò)通信協(xié)議,屬于現(xiàn)場總線范疇。CAN最早被設(shè)計作為汽車
2018-03-26 15:59:006594 
CAN已經(jīng)形成國際標(biāo)準(zhǔn),并已被公認(rèn)為幾種最有前途的現(xiàn)場總線之一。CAN 總線的數(shù)據(jù)通信具有突出的可靠性、實時性和靈活性。由于其良好的性能及獨特的設(shè)計,CAN總線越來越受到人們的重視,它在汽車領(lǐng)域上的應(yīng)用是最廣泛的。接下來及跟隨小編一起來了解一下CAN總線的工作原理、特點及優(yōu)缺點、應(yīng)用領(lǐng)域及應(yīng)用案例吧。
2018-05-07 10:36:3933701 
CAN總線通信是目前汽車電子和工業(yè)現(xiàn)場的主流通信,CAN總線憑其穩(wěn)定性、時效性、抗干擾性、傳輸距離遠(yuǎn)及低成本等特點,占領(lǐng)總線巔峰,但是隨著越來越多的電子產(chǎn)品的誕生,再加上工業(yè)現(xiàn)場等干擾,即使是CAN
2018-05-07 17:09:357545 前言 CAN總線的應(yīng)用在現(xiàn)在看來越來越廣泛,我廠設(shè)備從最初的ARM9與ARM7平臺、期間升級過度到CortexA8與Cortex M3平臺,再到現(xiàn)在的Cortex M4平臺,圍繞CAN進行了一系列
2018-06-13 11:16:18332802 在線編程系統(tǒng)硬件主要包含三個部分:帶有下載上位機軟件的PC機、USB-CAN接口卡和安裝有Bootloader程序的ECU.上位機通過USB-CAN接口卡與ECU通信,并進行代碼的升級。軟件主要包含兩個部分:上位機的Bootloader下載程序和下位機的Bootloader程序。
2018-11-01 08:08:003519 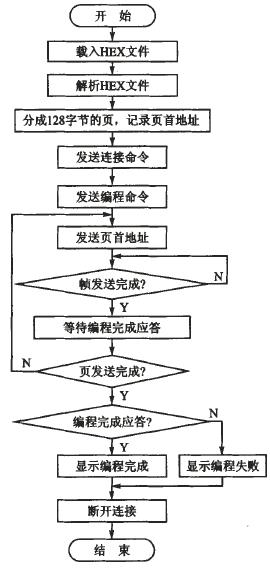
在理解了CAN總線的自通信程序后,再來探討CAN總線間的相互通信變得容易了許多。對于是自通信還是相互通信,這個肯定是需要對寄存器進行必要的設(shè)置 的,分析PIAE的兩個程序后不難發(fā)現(xiàn),自通信和互通信
2018-09-21 15:06:021466 目前,已有很多學(xué)者對CAN總線通信性能進行分析研究。文中在分析CAN總線通信控制協(xié)議的基礎(chǔ)上,在MATLAB/Sinulink軟件Stateflow仿真環(huán)境下,利用有限狀態(tài)機理論對CAN總線通信系統(tǒng)
2019-06-13 15:20:542851 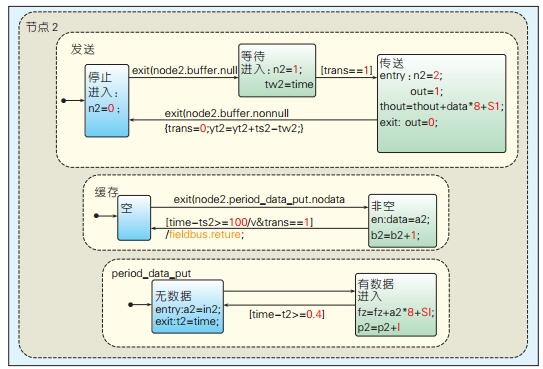
本文提出的CAN總線工程車輛遠(yuǎn)程監(jiān)測系統(tǒng),通過車載電子控制裝置ECU的CAN總線獲取車輛運行信息,并利用GPRS無線網(wǎng)絡(luò)通信手段對車輛進行遠(yuǎn)程監(jiān)控及調(diào)度管理。
2019-10-23 17:14:451564 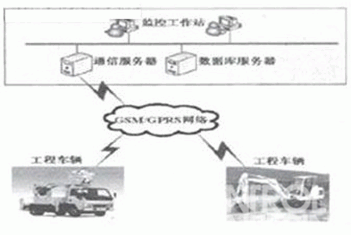
專用液晶顯示屏用來顯示轉(zhuǎn)速、機油壓力、水溫、燃油消耗等;PC機用來處理CAN總線上的數(shù)據(jù)并通過軟件顯示于顯示屏上;PC-CAN接口卡完成PC機與CAN之間的通信;自行設(shè)計的ECU完成從各傳感器采集
2020-03-16 10:00:392084 
本文在分析can總線航天應(yīng)用的基礎(chǔ)上,從硬件原理設(shè)計、cpu與can總線接口實現(xiàn)以及can總線通信軟件設(shè)計等方面進行了論述。
2020-04-02 09:53:062838 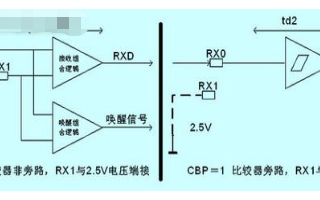
CAN總線的物理層是將ECU(Electronic Control Unit-電子控制單元,又稱“行車電腦”、“車載電腦”等)連接至總線的驅(qū)動電路。ECU的總數(shù)將受限于總線上的電氣負(fù)荷。物理層定義
2020-08-14 11:29:137853 CAN是ControlAreaNetwork的縮寫,該項技術(shù)最早由德國BOSCH公司推出,用于汽車內(nèi)部測量與執(zhí)行部件之間的數(shù)據(jù)通信。其總線
2021-04-06 12:10:075325 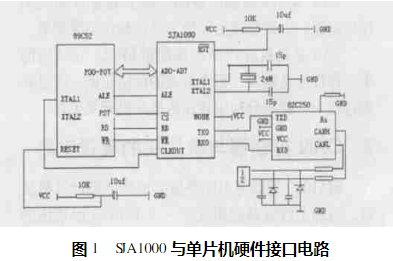
CAN總線通信協(xié)議詳細(xì)如下。
2021-04-19 16:54:3875 總線是當(dāng)今自動化領(lǐng)域技術(shù)發(fā)展的熱點之一,被譽為自動化領(lǐng)域的計算機局域網(wǎng)。 一般工程師們都知道在汽車中大部分都會用到CAN總線,其實還有許多的船艦電子設(shè)備通信也會用到CAN總線,現(xiàn)在CAN總線的適用范圍越來越廣泛。 CAN總線的優(yōu)勢是網(wǎng)絡(luò)各節(jié)點之間的數(shù)據(jù)通信實時性強、開發(fā)
2021-08-07 16:37:1317489 ),是一種用于實時應(yīng)用的串行通訊協(xié)議總線,它可以使用雙絞線來傳輸信號,是世界上應(yīng)用最廣泛的現(xiàn)場總線之一。CAN協(xié)議用于汽車中各種不同元件之間的通信,用來取代昂貴而笨重的配電線束。CAN協(xié)議的使用廣泛這一特點使其很快延伸到自動化控制以及工業(yè)領(lǐng)域中。 CAN協(xié)議的特性包括完
2022-01-15 17:04:485782 計。在引入CAN之前,每個電子設(shè)備都使用多條電線連接到其他設(shè)備以實現(xiàn)通信。但是當(dāng)汽車系統(tǒng)中的功能增加時,由于布線系統(tǒng)繁瑣,維護起來很困難。在CAN總線系統(tǒng)的幫助下,只需將每個ECU連接到公共串行總線,即可讓ECU相互通信,而無需太多復(fù)雜性。因此,與汽
2022-01-20 17:31:363596 CAN),用于連接舒適系統(tǒng)的ECU;一個最高傳輸速率可達(dá)1Mbps的高速CAN總線系統(tǒng)(高速CAN),用于連接動力系統(tǒng)和底盤系統(tǒng)的ECU。CAN提供了極高的傳輸安全性。這得益于差分信號傳輸和5種錯誤檢測機制(比如位監(jiān)視,形式檢查,循環(huán)冗余碼檢查),這些功能是由CAN控制器實現(xiàn)的。
2022-11-08 10:48:181763 【導(dǎo)讀】介紹了CAN總線與伺服電機的特點,并討論了伺服電機基于CAN總線的通信控制特性。
2022-12-27 10:57:565484 即從CAN控制芯片輸出邏輯電平到CAN收發(fā)器,然后經(jīng)過CAN收發(fā)器內(nèi)部轉(zhuǎn)換將邏輯電平轉(zhuǎn)換為差分信號輸出到CAN總線上,CAN總線上的節(jié)點都可以決定自己是否需要總線上的數(shù)據(jù)。
2023-03-29 10:06:167598 控制器局域網(wǎng)絡(luò)系統(tǒng)(CAN總線系統(tǒng)):由多個電,子控制單元(ECU)同時控制多個工作裝置或系統(tǒng),各控制單元(ECU)的共用信息通過總線互相傳遞。
2023-05-05 11:53:03818 
什么是CAN總線?
CAN (Controller Area Network)是二十世紀(jì)八十年代初德國Bosch公司為解決現(xiàn)代汽車中眾多電控單元( ECU )之間的數(shù)據(jù)交換而開發(fā)的一種單工串行通信協(xié)議。
2023-05-16 14:31:54757 
點擊上方 藍(lán)字 關(guān)注我們 摘要:以FPGA 代替?zhèn)鹘y(tǒng)的單片機和外圍擴展芯片, 給出了CAN 總線通信節(jié)點的詳細(xì)設(shè)計方案。其中以SJA1000為CAN 總線控制器、FPGA 為主控制器, 設(shè)計實現(xiàn)通信
2023-06-18 11:15:011796 傳統(tǒng)的車載CAN總線最高支持500 kbit/s的傳輸速率,每幀只能承載8 bytes的數(shù)據(jù),由于傳輸速率和數(shù)據(jù)長度的限制,在自動駕駛和智能網(wǎng)聯(lián)對網(wǎng)絡(luò)通信的高要求背景下,使用傳統(tǒng) CAN 通信勢必會導(dǎo)致總線負(fù)載率過高從而導(dǎo)致網(wǎng)絡(luò)擁堵,傳統(tǒng)CAN總線通信的瓶頸逐漸凸顯。
2023-06-18 17:14:381854 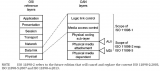
點擊關(guān)注,電磁兼容不迷路。什么是CAN總線CAN總線是一種廣泛用于汽車、工業(yè)自動化和其他領(lǐng)域的串行通信協(xié)議。它允許多個設(shè)備共享通信線路,傳輸數(shù)據(jù)以及控制信號。CAN總線有兩個不同的版本
2023-04-21 09:42:31639 
基本的CAN 總線布局只包括兩根在兩端終止的雙絞線。ECU 或任何需要通信的系統(tǒng)都可以連接到這些導(dǎo)線上,因此可以滿足任何數(shù)量的ECU 去連接。
2023-08-14 15:13:03896 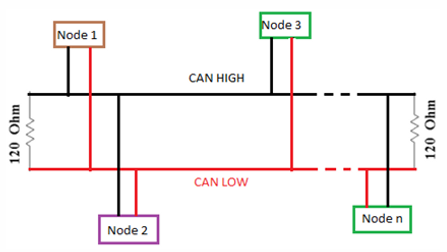
CAN總線(Controller Area Network)是一種廣泛應(yīng)用于汽車、工業(yè)自動化和其他領(lǐng)域的串行通信協(xié)議。以下是幾種常見的CAN總線通信協(xié)議。
2023-08-18 14:40:128850 
CAN作為汽車ECU之間廣泛應(yīng)用的通信總線,有一些和應(yīng)用相關(guān)的基礎(chǔ)問題。
2023-08-19 09:38:052716 
can總線負(fù)載率多少合理? CAN總線是一種控制器區(qū)域網(wǎng)絡(luò),它是用于在不同設(shè)備之間進行通信的技術(shù)。CAN總線的應(yīng)用領(lǐng)域廣泛,例如汽車、航空航天、醫(yī)學(xué)儀器等。在CAN總線中,數(shù)據(jù)通過網(wǎng)絡(luò)傳輸,并且在
2023-09-07 15:05:412173 can總線為什么要用雙絞線?can總線不用雙絞線可以嗎? CAN總線是一種數(shù)據(jù)通信協(xié)議,廣泛用于汽車、航空、船舶、工業(yè)自動化、機器人等領(lǐng)域。CAN總線采用串行通信方式,主要用于實現(xiàn)多個模塊之間的通信
2023-09-14 16:48:053607 越來越多的ECU之間的數(shù)據(jù)的相互交換,早期的網(wǎng)絡(luò)結(jié)構(gòu)已經(jīng)不能滿足現(xiàn)有的需要, CAN總線應(yīng)運而生。
2023-12-04 17:05:39114 
CAN總線共模電感是應(yīng)用于CAN總線通信中的一種電子元件,用于解決CAN總線通信中的共模干擾問題。本文將詳細(xì)介紹CAN總線共模電感的定義、作用、選型要點以及常見注意事項,并且結(jié)合實際案例進行分析
2024-01-05 13:42:34748 作為一種串行通訊協(xié)議,CAN總線初期專為汽車電子設(shè)備間的通信而開發(fā)。借助其高度可靠、實時響應(yīng)及靈活應(yīng)用等特質(zhì),該總線在汽車市場獲得廣泛使用。借助于CAN總線,我們得以將眾多電子控制單元(ECU)相連,從而實現(xiàn)車輛的分布式控制和信息資源共享。
2024-02-15 14:46:0094 CAN總線采取多種技術(shù)措施來消除外界干擾,確保可靠通信。
2024-01-30 09:50:44249
 電子發(fā)燒友App
電子發(fā)燒友App



 且本身具有較高的通信速率。CAN總線正是為滿足這些要求而設(shè)計的。CAN已有國際標(biāo)準(zhǔn),即高速場合的ISO11898和用于低速場合的ISO11519-3。
且本身具有較高的通信速率。CAN總線正是為滿足這些要求而設(shè)計的。CAN已有國際標(biāo)準(zhǔn),即高速場合的ISO11898和用于低速場合的ISO11519-3。









 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論