? ? ? 伺服電機是一種能夠根據輸入信號精確控制位置、速度和扭矩的電機。它在自動化的工業領域得到廣泛應用,數據中心、機器人、醫療設備等都離不開伺服電機的運動控制。而伺服電機的定位方式有兩種,一種
2024-03-18 08:39:44 22
22 
數控加工中數控機床在返回參考點時,顯示510或511超程報警,處理方法有兩種: 如果X軸在返回參考點時出現510或是511超程報警,把參數0700LT1X1數值改為+99999999(或將0704LT1X2數值修改為-99999999)后,再返回參考點。
2024-02-29 14:34:0894 交流伺服電機是一種通過閉環反饋控制系統實現精確位置、速度和轉矩控制的電機。它在工業自動化、機械加工、機器人領域有著廣泛的應用。本文將詳細介紹交流伺服電機的工作原理和控制方式。 一、交流伺服電機
2024-02-18 14:59:25268 伺服電機是不是也可以改變“相序”來實現電機正反轉呢? 伺服電機是一種常見的電動執行器,廣泛應用于工業自動化、機器人、CNC機床等領域。除了控制轉速和位置精度外,伺服電機還可以實現正反轉功能。反轉操作
2024-02-18 14:35:29539 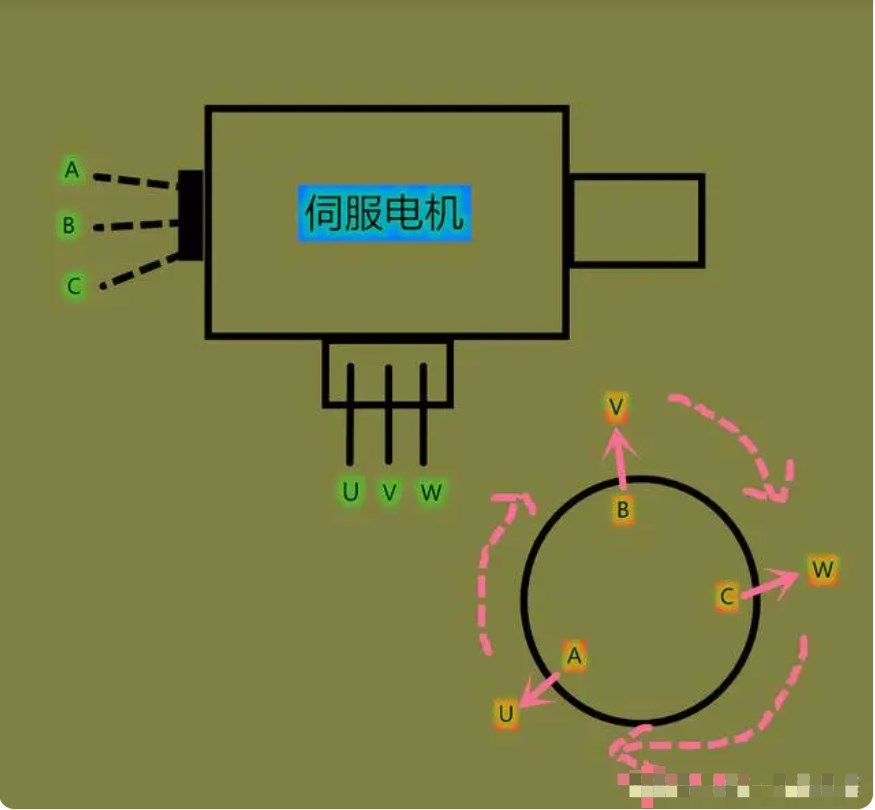
伺服電機是一種專門設計用于精確控制位置、速度和加速度的電動機。它通常與伺服驅動器(也稱為伺服放大器或伺服控制器)一起使用,形成一個閉環控制系統。這種系統能夠提供高精度的運動控制,并且廣泛應用于機器
2024-02-16 10:55:00478 請教伺服電機絕對定位和相對定位問題? 伺服電機是一種能夠根據輸入信號精確控制位置、速度和扭矩的電機。它在自動化的工業領域得到廣泛應用,數據中心、機器人、醫療設備等都離不開伺服電機的運動控制。而伺服
2024-02-05 17:39:501069 和運動控制的領域,如數控機床、機器人、自動化生產線等。 伺服電機的工作原理可以簡單總結為以下幾個步驟: 接收指令信號:控制器接收來自外部設備(如PLC)的指令信號,指令信號包含了期望的運動狀態,如位置和速度。 反
2024-02-04 10:10:45247 的優缺點。 首先,讓我們來了解一下PMAC。PMAC是一種可編程的多軸控制器,它通常用于控制復雜的運動系統,如數控機床、機器人和印刷設備等。PMAC具有高度靈活性和可編程性,可以根據應用的需求進行定制和配置。它支持多種類型的反饋傳感器,例如編碼
2024-02-01 14:19:21345 數控機床的工作過程一般為:數控裝置內的計算機對通過輸入裝置以數字和字符編碼方式所記錄的信息進行一系列處理后,再通過伺服系統及可編程序控制器向機床主軸及進給等執行機構發出指令。
2023-12-26 18:12:31478 
伺服電機的三種控制方式 如何確定選擇伺服電機控制方式? 伺服電機是一種能夠根據輸入信號實時調整轉速和位置的電動機。它通常用于需要高精度、高效率、高可靠性的工業領域,如機床、機器人、印刷設備等。伺服
2023-12-26 14:02:19578 什么是伺服電機的原點設置?伺服電機零點和原點的區別 伺服電機的原點設置,簡單來說,就是確定電機的起始位置或參考位置。在使用伺服電機控制系統時,需要將電機的位置與設定的參考位置進行對齊,以確保精準
2023-12-25 13:57:591129 伺服電機是否必須有對應的伺服驅動器來控制?沒有伺服驅動器能使用伺服電機嗎?怎么控制?首次接觸,不懂
2023-12-15 07:49:19
? ? ? ?伺服電機是自動控制裝置中被用作執行元件的微特電機,其功能是將電信號轉換成轉軸的角位移或角速度。 伺服電機分為交流伺服和直流伺服兩大類 交流伺服電機的基本構造與交流感應電動機(異步電機
2023-12-11 16:58:01603 伺服電機選型是在設計或選擇機械設備時,根據工作需求和性能參數來確定適合的伺服電機。伺服電機是一種特殊類型的電機,具有高精度控制和反饋系統,廣泛應用于機械、自動化和機器人領域。 伺服電機選型計算
2023-12-01 16:20:16561 對刀是數控加工中的主要操作和重要技能。在一定條件下,對刀的精度可以決定零件的加工精度,同時,對刀效率還直接影響數控加工效率。
2023-11-25 11:17:34683 指令機構發脈沖或者給速度,用于配合驅動器正常工作。伺服電機可以將電壓信號轉化為轉矩和轉速,按照位置、力矩或速度指令精確地控制機械系統運動,內嵌的編碼器將伺服電機的運動參數反饋給伺服驅動器,完成閉環控制。
2023-11-20 18:17:56583 
數控刀具作為數控機床和加工中心用刀具,是數控工藝系統中最重要的組成部分[2]。刀具技術的更新代表著數控加工的高質量發展。數控刀具在國外發展較快,品種多,已形成系列[3]。
2023-11-17 16:08:03846 
人形機器人新增更多電機需求,伺服電機和步進電機均具備適配性。
未來人形機器人單臺電機用量有望超40個,而伺服電機是主要配置,包括四肢及軀干,占據大部分用量份額。
2023-11-08 12:45:14333 
直流伺服電機需要電流環嗎?交流伺服電機電流環有什么用?
2023-11-03 07:07:06
隨著攝像設備性能價格比和計算機信息處理速度的提高,以及有關理論的日益完善,視覺伺服已具備實際應用的技術條件,相關的技術問題也成為當前研究的熱點。機器視覺,美國制造工程師協會
2023-11-02 08:07:37271 
工業機器人有4大組成部分,分別為本體、伺服、減速器和控制器。而其中,工業機器人電動伺服系統的一般結構為三個閉環控制,即電流環、速度環和位置環。一般情況下,對于交流伺服驅動器,可通過對其內部功能參數進行人工設定而實現位置控制、速度控制、轉矩控制等多種功能。
2023-11-01 09:32:28485 
近年來,受益于伺服電機下游廣泛的應用范圍,全球范圍內伺服電機行業市場需求正在穩步增長。隨著伺服電機需求的增長,特別是工業機器人對于伺服電機需求的不斷擴大,全球伺服電機行業的市場規模在穩步增大
2023-11-01 08:07:32932 抗熱沖擊熱震試驗機是一種用于評估玻璃瓶耐熱性能的實驗設備,它通過模擬玻璃瓶在實際使用過程中可能遇到的溫度變化,檢測玻璃瓶的抗熱沖擊性能。該設備主要由加熱系統、冷卻系統、溫度控制系統、被測玻璃瓶
2023-10-31 16:44:39
立方燈用什么函數控制
2023-10-30 07:39:20
新機器的設計包括多個基于PC的控制解決方案、運動控制硬件和具有運動功能的通用自動化軟件。Labplas在15條生產線上配置了機器人。拾放機器人和其它運動軸配備了由EtherCAT伺服驅動器控制的伺服電機。
2023-10-25 10:38:12144 數控系統參數是數控機床的靈魂,數控機床軟硬件功能的正常發揮是通過參數來設定的。機床的制造精度和維修后的精度恢復也需要通過參數來調整,所以數控機床沒有參數等于是一堆廢鐵。數控機由于數控系統參數全部丟失
2023-10-21 09:27:18747 多軸伺服,一芯搞定
2023-10-19 17:54:23279 
數控機床電機通過將電能轉換為機械能來產生運動,在這個過程中,電流通過纏繞在電樞上的電線,當電流通過導線時,會產生一個磁場,拉住軟鐵芯,這會導致電機軸在機器內部旋轉,從而導致機器部件移動。
2023-10-17 10:03:08141 如何防止電子變壓器弄壞伺服驅動器?? 伺服驅動器是一種高級調速驅動器,其主要功能是將電機的轉速和轉矩從控制信號中高精度地轉換成相應的電信號,以實現精密控制。伺服驅動器在機器人、自動化設備、數控
2023-09-25 17:47:58488 日本AMADA公司的數控機床將cad圖紙轉換成機器程序,可以進行版面排布,程序轉換,傳輸等操作。
2023-09-19 09:22:24 0
0 查看 rtsp 服務是否實時推流
2023-09-18 07:36:13
在回答這個問題之前,首先要清楚伺服電機的用途,相對于普通的電機來說,伺服電機主要用于精確定位,因此大家通常所說的控制伺服,其實就是對伺服電機的位置控制。其實,伺服電機還用另外兩種工作模式,那就是速度控制和轉矩控制,不過應用比較少而已。
2023-09-08 11:22:48734 運動控制與機器人密切相關。工業應用中的機器人必須透過由多款電機所構成的致動器才能自行移動,以執行任務或透過機器手臂抓取工具。
2023-09-06 14:21:02552 
什么是伺服電機?伺服是一種電磁裝置,利用負反饋機制將電信號轉換為受控運動。基本上,伺服系統的行為類似于執行器,提供對速度、加速度和線性或角度位置的精確控制。它由四件事組成:直流電機、位置傳感器、齒輪
2023-08-30 08:08:521675 伺服是一種電磁裝置,利用負反饋機制將電信號轉換為受控運動。基本上,伺服系統的行為類似于執行器,提供對速度、加速度和線性或角度位置的精確控制。
2023-08-29 15:04:07872 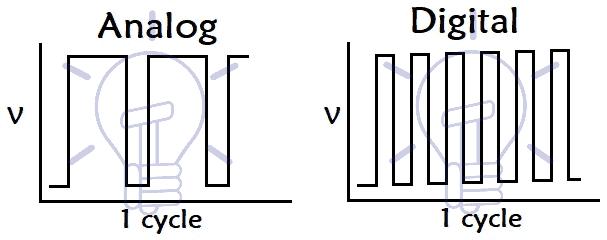
伺服系統主要由伺服控制器、驅動電路、伺服電動機及相應反饋檢測器件組成。1.伺服系統原理當人為的給定控制信號并被伺服控制系統接收時,執行機構就會按照控制信號的指令進行一系列的運動和動作;如果不再
2023-08-27 08:08:421720 伺服電動缸是將伺服電機與絲杠一體化設計的模塊化產品,將伺服電機的旋轉運動轉換成直線運動,同時將伺服電機最佳優點-精確轉速控制,精確轉數控制,精確扭矩控制轉變成-精確速度控制,精確位置控制,精確推力
2023-08-25 08:08:46476 作為數控機床、工業機器人及其它產業機械控制的關鍵技術之一,伺服驅動技術一直在國內外普遍受到關注。
2023-08-23 10:16:16467 一、數控銑床,打開電源和系統,伺服電機嗡嗡響,響幾分鐘之后伺服電機會發熱,調小剛性后不響了,但銑出來的圓不像圓,該怎樣調?應該是幾臺驅動器設置的增益不同,造成電機在不同的轉速下自激。可以
2023-08-22 08:08:31629 在現代工業領域,伺服驅動器是一種關鍵的電氣裝置,它在機器控制和運動控制系統中發揮著至關重要的作用。無論是工業機器人、數控機床還是自動化生產線,伺服驅動器都是實現精準位置控制和高效運動控制的關鍵組件。本文將介紹伺服驅動器的工作原理、應用領域以及在現代工業中的重要作用。
2023-08-21 17:34:022328 安川伺服電機的核心是電機和伺服控制器。伺服控制器通過檢測電機轉速和位置等反饋信息,精確控制電機的旋轉速度、位置和力矩等參數。而這種精準的控制方式,又可以使機器人和自動化設備在各種復雜環境中更加靈活和高效地工作。
2023-08-17 08:52:19637 
(1)在數控機床中,伺服電機位置模式常用于驅動進給軸。通過位置模式,可以實現對切削工具的精確位置控制,以實現高精度的加工操作。 (2)在自動化生產線中,伺服電機位置模式常用于驅動定位裝置、機械
2023-08-15 08:25:01483 在回答這個問題之前,首先要清楚伺服電機的用途,相對于普通的電機來說,伺服電機主要用于精確定位,因此大家通常所說的控制伺服,其實就是對伺服電機的位置控制。其實,伺服電機還用另外兩種工作模式,那就是速度控制和轉矩控制,不過應用比較少而已。
2023-08-09 09:25:28599 伺服驅動器又稱為“伺服控制器”、“伺服放大器”,是用來控制伺服電機的一種控制器,其作用類似于變頻器作用于普通交流馬達,屬于伺服系統的一部分。一般是通過位置、速度和力矩三種方式對伺服電機進行控制,實現高精度的傳動系統定位。
2023-08-08 10:38:194715 
模塊。盡管術語“伺服電動機”通常用于表示適用于閉環控制系統的電動機,但伺服電動機不是特定的電動機類別。伺服電機用于機器人,數控機械或自動化制造等應用。隨著工業經濟的
2023-08-05 08:10:07318 機器人在運行過程中,是通過伺服電機的驅動實現多自由度的運動的。如果對機器人運行的動作速度、精度有比較高的要求,實際就要求伺服電機的響應速度、控制精度要足夠高。因此,在選擇伺服電機的時候,一定要掌握
2023-08-05 08:09:39796 常見的機器人視覺伺服中要實現像素坐標與實際坐標的轉換,首先就要進行標定,對于實現視覺伺服控制,這里的標定不僅包括攝像機標定,也包括機器人系統的手眼標定。
2023-08-04 11:48:47578 
機器人在運行過程中,是通過伺服電機的驅動實現多自由度的運動的。如果對機器人運行的動作速度、精度有比較高的要求,實際就要求伺服電機的響應速度、控制精度要足夠高。因此,在選擇伺服電機的時候,一定要掌握步驟,把握要點。
2023-08-03 10:31:17941 電子發燒友網站提供《基于STSPIN32G4輕量化協作機器人關節伺服驅動解決方案.pdf》資料免費下載
2023-07-31 15:07:475 傳統關節機器人主要由本體結構件、減速器、伺服電機、控制器等構成。
2023-07-24 11:08:051314 
數控機床伺服電機是數控系統中重要的動力驅動裝置,對于確保機床的穩定性和精度至關重要。如果出現故障,及時的維修是至關重要的。下文是小編為您整理的一些常見的數控機床伺服電機故障及其維修方法,幫助您解決一些常見的問題。
2023-07-19 11:25:04731 數控機床伺服主軸的硬件有哪些控制部分?|深圳恒興隆機電
2023-07-11 10:52:49385 
SEW伺服驅動系統由伺服減速電機和伺服變頻器組成,伺服電機分為同步伺服(DS,DY,CM)和異步伺服(CT,CV),按照傳統的分類,這里特別介紹恒場同步永磁伺服電機及其驅動變頻器。
2023-07-03 14:58:24846 
伺服電機具有獨特的特性,即根據輸入信號的脈沖寬度轉向特定角度(0,90,180)。這些伺服電機廣泛用于機器人應用、機械控制等。通常微控制器將用于控制伺服電機,但偶爾您會發現一些其他IC用于此目的。本文介紹了伺服電機的工作原理和工作原理。
2023-06-29 15:44:291637 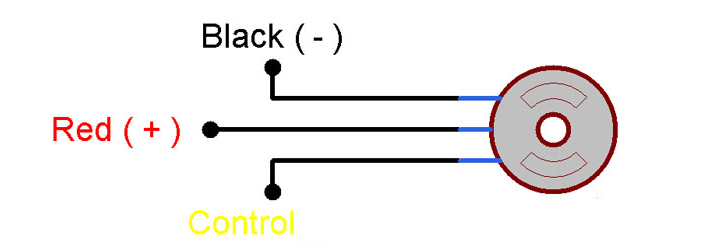
柔性供料/震動盤是主要以小型電子產品為主,那么中大型其它產品就不能解決了嗎?不是!我們針對柔性供料所研發的系統,它是可以適用于所有電子產品。柔性供料系統它包含CCD視覺、CCD視覺控制系統與機器
2023-06-29 14:46:57
電子發燒友網站提供《Arduino伺服電機避障機器人.zip》資料免費下載
2023-06-29 14:38:190 ABB?通過提供 E530?伺服驅動器和 DSM?伺服電機的產品組合,提供整體伺服系統解決方案。E530?伺服驅動器是一款通用型伺服驅動器,其工作電壓為交流單 /三相 200 V ~ 240
2023-06-27 10:41:34440 
施耐德電氣創新研發的新一代Lexium 1 8系列伺服,專為實現機器的輕松集成與調試而設計,融合其在伺服運動控制領域的專業技術,確保產品性能。
2023-06-26 11:16:27232 
機床測頭一般安裝在數控車床、加工中心、數控磨床等數控機床上。它是機床加工中的重要輔助裝置,在加工循環中不需人為介入,就能直接對刀具或工件的尺寸及位置進行測量,并根據測量結果自動修正工件或刀具的偏置量
2023-06-19 14:15:05
伺服電機驅動器是能被工業機器人及數控加工中心等自動化設備廣泛應用的產品,它是屬于伺服系統的一部分,能應用于高精度的定位系統。
2023-06-18 17:43:21214 
伺服電機用于各種應用,如機器人、工業、計算機、門、玩具等等。但與通用直流電機不同,我們可以控制伺服電機的角度。這提供了使用此電機的更精確的運動。但是伺服需要特殊的電路才能運行。這就是上述伺服電機
2023-06-18 11:11:15525 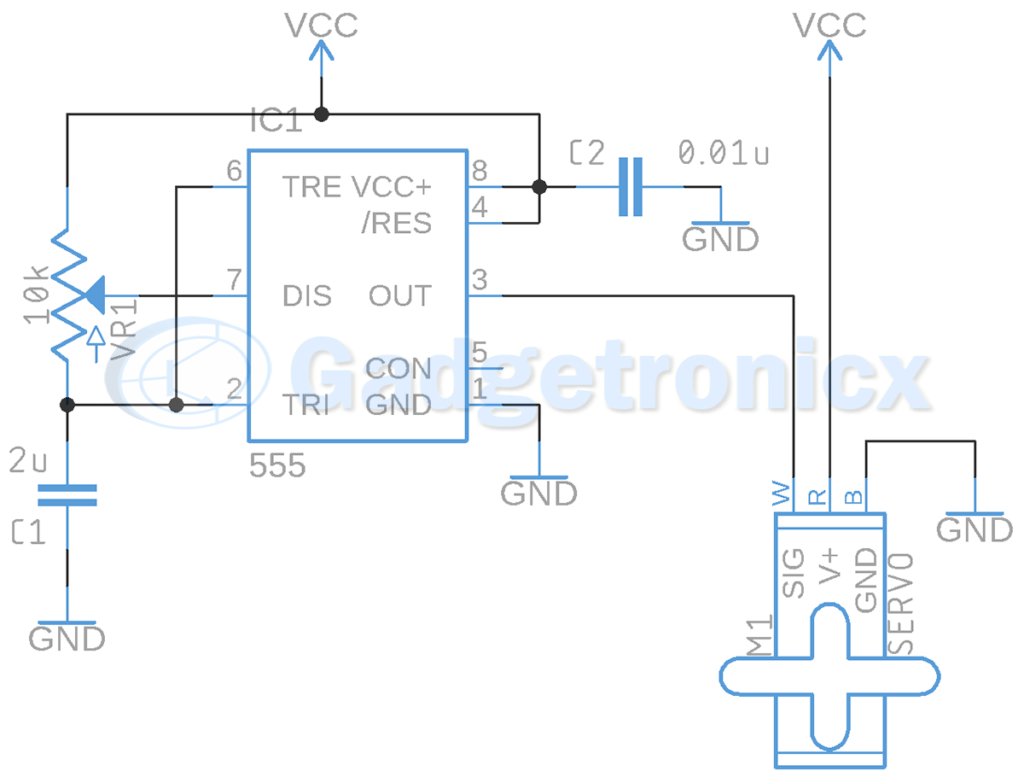
抓取機器人需要對物體進行高精度、高速度的抓取和放置,因此需要使用高性能的伺服電機來實現精準的運動控制。相比于其他類型的電機,伺服電機具有以下優點,適合應用于抓取機器人中: 1、伺服電機可以實現高精度
2023-06-15 09:15:02377 數控機床可按加工工藝、運動方式、伺服控制方式、機床性能等進行分類。從加工對象(零件)表面形成工藝特點,傳統上通常將數控機床分為數控金屬切削機床、數控金屬成形機床兩大類。
2023-06-11 11:50:191659 
目前需要使用1126 rtsp推流,有沒有什么方向能夠減少直播過程中的延時
2023-06-08 16:40:51
目前,數控雕刻機逐漸成為各行業生產的必備專業工具。隨著CNC數控技術配合高性能的變頻控制器和伺服驅動設備在各生產行業的發展應用,數控雕刻機日益成為當今雕刻行業的主流配置。
2023-06-05 10:26:56751 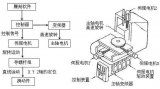
伺服編碼器是工業機器人技術核心伺服電機的必配,對于伺服電機性能乃至機器人性能的作用極為關鍵。
2023-05-25 11:35:342560 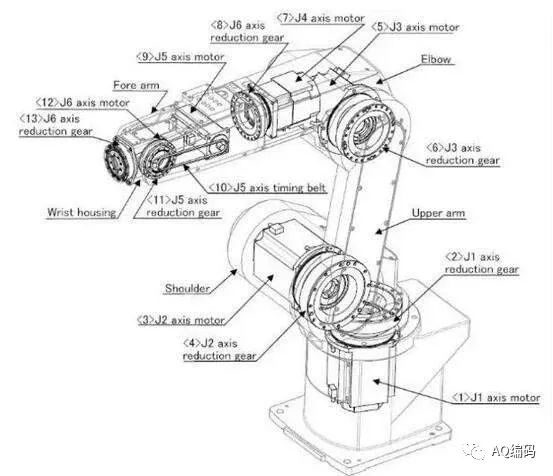
數控系統輸入至進給驅動單元的除了速度控制信號外,還有伺服使能控制信號,一般為DC + 24 V繼電器線圈電壓。檢查數控系統是否有速度控制信號輸出; 檢查使能信號是否接通。
2023-05-25 08:53:251268 Interact Analysis研究顯示,從市場規模來看,2022年工業機器人的核心“三大件”,即伺服電機、伺服驅動和減速器合計占工業機器人整體銷售額的35%,其中減速器份額占比最高,達到14%,伺服電機和驅動占比分別為11%、10%。
2023-05-24 16:40:14971 
工業機器人電動伺服系統的一般結構為三個閉環控制,即電流環、速度環和位置環。一般情況下,對于交流伺服驅動器,可通過對其內部功能參數進行人工設定而實現位置控制、速度控制、轉矩控制等多種功能。
2023-05-22 10:28:48214 基于西門子828D數控系統,設計了一套帶有展刀頭的車加工機床控制系統,主要由西門子828D數控系統、基恩士高精度接觸式傳感器、輸入/輸出模塊、S120伺服驅動器、伺服電機和絕對位置編碼器組成。利用
2023-05-19 16:52:062670 
伺服驅動器是現代運動控制的重要組成部分,被廣泛應用于工業機器人及數控加工中心等自動化設備中。尤其是應用于控制交流永磁同步電機的伺服驅動器已經成為國內外研究熱點。當前交流伺服驅動器設計中普遍采用
2023-05-17 10:04:201055 數控機床是什么工作 數控車床是使用較為廣泛的數控機床之一。它主要用于軸類零件或盤類零件的內外圓柱面、任意錐角的內外圓錐面、復雜回轉內外曲面和圓柱、圓錐螺紋等切削加工,并能進行切槽、鉆孔、擴孔
2023-05-09 15:16:322392 伺服電機(servo motor )是指在 伺服系統 中控制 機械元件 運轉的發動機,是一種補助馬達間接變速裝置。 伺服電機可以控制速度,位置精度非常準確,可以將電壓信號轉化為 轉矩 和轉速以驅動
2023-05-06 11:22:334 通常由電機控制器、電機驅動、電機本體(多為伺服電機)組成。電機控制器具備智能運算功能,并可傳送指令以驅動電機。驅動可提供增壓電流,根據控制器指令以驅動電機。電機可以直接移動機器人, 也可通過傳動系統
2023-05-06 11:06:371 設備如液壓泵,線性執行機或者是電機來控制機器的位置或速度。運動控制在機器人和數控機床的領域內的應用要比在專用機器中的應用更復雜,因為后者運動形式更簡單,通常被稱為通用運動控制(GMC)。運動控制被廣泛應用在包裝、印刷、紡織和裝配工業中。
2023-05-06 10:14:201328 
永磁交流伺服電動機同直流伺服電動機比較,主要優點有: ⑴無電刷和換向器,因此工作可靠,對維護和保養要求低。
2023-05-04 10:24:55166 在回答這個問題之前,首先要清楚伺服電機的用途,相對于普通的電機來說,伺服電機主要用于精確定位,因此大家通常所說的伺服控制,其實就是對伺服電機的位置控制。 其實,伺服電機還用另外兩種工作模式,那就是速度控制和轉矩控制,不過應用比較少而已。
2023-04-27 17:34:351113 
數控機床的發展趨勢 數控機床是應用計算機數控技術,對機床進行控制和管理的一種現代化機床,其廣泛應用于汽車、航空航天、機械制造等領域。隨著科技的不斷進步和市場需求的不斷增加,數控機床的技術也在不斷創新
2023-04-26 14:24:403968 交流伺服電機的性能要好一些,因為交流伺服是正弦波控制,轉矩脈動小;而無刷直流伺服是梯形波控制。但無刷直流伺服實現控制比較簡單,便宜。
2023-04-26 10:27:00832 ABB機器人本體(機械臂)需要六個自由度,所提供的動力來自于6個三相交流伺服電機(Servo Motor),每個交流電機除了三組線圈繞組導線外,還有其他部件的引出線:一組接PTC,一組接剎車(Brake),還有編碼器(Resolver)有三組導線。
2023-04-23 10:38:121941 
泰科伺服生產的MT無刷伺服系統主要由IDM系列伺服驅動器與兼容NEMA法蘭尺寸的直流無刷伺服電機組合而成。采用直流供電,最大功率可達600W,主要應用于小型移動機器人、自動化檢測組裝、醫療設備等行業
2023-04-20 10:45:52
【簡介】 APX系列可編程精密伺服驅動器是一款通用、高性能、交/直流供電、結構緊湊的全數字伺服驅動器
2023-04-20 10:21:24
機器人關節電機是專業為機器人關節設計研發生產。電機既有中空大孔徑,能保證關節模組完美融合的組合, 電機的定轉子機構緊湊,轉子采用了高性能稀土永磁材料,此系列電機轉矩脈動極低,易于速度控制和精確
2023-04-20 10:07:10
APXS 系列可編程精密伺服驅動器是一款通用、高性能、交/直流供電、結構緊湊的全數字伺服驅動器,最大功率可達1KW。集可編程運動控制、PLC、伺服驅動功能于一體。主要應用于直線(DDL)、力矩
2023-04-20 09:57:49
深圳泰科智能小型通用伺服驅動器,帶EtherCAT總線,RS232總線 ,14-80V直流供電,連續電流最大15A,高精度,可編程,小體積,易安裝,可插入,省空間。 主要特性
2023-04-20 09:20:46
RDM協作機器人關節伺服驅動模塊是一款基于FPGA 先進技術開發而成的高性能、直流供電、結構極其緊湊的全數字通用伺服驅動器,最大功率可達 1000W。通過EtherCAT/CANopen 總線控制
2023-04-19 15:39:40
泰科智能生產的MT無刷伺服系統主要由IDM系列伺服驅動器與兼容NEMA法蘭尺寸的直流無刷伺服電機組合而成。采用直流供電,最大功率可達600W,主要應用于小型移動機器人、自動化檢測組裝、醫療設備等行業
2023-04-19 11:07:03
機器人關節電機是專業為機器人關節設計研發生產。電機既有中空大孔徑,能保證關節模組完美融合的組合, 電機的定轉子機構緊湊,轉子采用了高性能稀土永磁材料,此系列電機轉矩脈動極低,易于速度控制和精確
2023-04-18 17:35:19
深圳泰科智能小型通用伺服驅動器,帶EtherCAT總線,RS232總線 ,14-80V直流供電,連續電流最大15A,高精度,可編程,小體積,易安裝,可插入,省空間。 主要特性
2023-04-18 10:30:11
RDM協作機器人關節伺服驅動模塊是一款基于FPGA 先進技術開發而成的高性能、直流供電、結構極其緊湊的全數字通用伺服驅動器,最大功率可達 1000W。通過EtherCAT/CANopen
2023-04-17 18:13:06
基礎,開始研發協作機器人關節模組。2019年,已經開發完成了一系列機器人電機、伺服驅動器、抱閘、增量/絕對值編碼器、RJS/RJSII/RJU/SHD系列機器人關節
2023-04-17 18:10:47
伺服驅動器(servo drives)又稱為"伺服控制器"、"伺服放大器",是用來控制伺服電機的一種控制器,其作用類似于變頻器作用于普通交流馬達,屬于伺服
2023-04-13 16:48:511316 數控機床伺服系統優化的目的,是為了更好地優化機械特性和電氣特性之間的配合,以獲得更高的伺服系統響應和機械剛性,從而獲得更好的加工性能[2]。
2023-04-11 12:45:571508 伺服電動機分為直流伺服電機和交流伺服電機。直流伺服電機比較便宜,交流伺服電機比較常用。
2023-04-04 15:05:451421 伺服驅動器是現代運動控制的重要組成部分,被廣泛應用于工業機器人及數控加工中心等自動化設備中。尤其是應用于控制交流永磁同步電機的伺服驅動器已經成為國內外研究熱點。當前交流伺服驅動器設計中普遍采用
2023-04-04 09:55:148060 
伺服控制系統廣泛的應用在工業機器人、數控機床、電子制造、印刷機械、紡織機械等領域,在工業生產中發揮重要的作用。在工業機器人和數控機床等領域,響應速度快、轉矩抖動小和精度高的伺服控制系統越來越關鍵
2023-04-03 10:01:39635 
機器人對伺服電機的要求比其它兩個部分都高。首先要求伺服電機具有快速響應性。電機從獲得指令信號到完成指令所要求的工作狀態的時間應短。
2023-03-27 15:02:311274 2023-2024年,以機器人核心零部件產品為主要技術研發路線,產品包括標準伺服電機、協作伺服電機、人形機器人伺服電機以及伺服電機配套產品,實現產業化生產以及產品的國產化替代。
2023-03-23 14:45:45475
 電子發燒友App
電子發燒友App









 工商網監
工商網監
評論