 電子發(fā)燒友App
電子發(fā)燒友App


汽車安全性一直被視作汽車最重要的特性,是汽車技術(shù)發(fā)展的一個關(guān)鍵驅(qū)動因素。目前,我國在汽車安全系統(tǒng)的研究上已經(jīng)取得了一定的進展。汽車安全系統(tǒng)分為主動安全系統(tǒng)與被動安全系統(tǒng)兩種:主動安全系統(tǒng)是指防抱死制動系統(tǒng)、緊急剎車輔助系統(tǒng)等這類傳統(tǒng)的汽車安全系統(tǒng),這些系統(tǒng)可以使得汽車的行駛更加穩(wěn)定,縮短制動距離,減少汽車的碰撞率,但是這些系統(tǒng)必須在人工控制的狀態(tài)下才能發(fā)揮出作用,沒有辦法預測和有效避免交通事故的發(fā)生;被動安全系統(tǒng)是指安全氣囊、兒童安全座椅、安全帶等這類安全系統(tǒng),這些系統(tǒng)的作用僅僅是減少車禍所帶來的損失,旨在碰撞發(fā)生后保障車內(nèi)與車外人員免受或少受碰撞的傷害,并無法避免交通事故的發(fā)生。隨著各方的共同努力,汽車的被動安全技術(shù)已日趨完善, 以預防危險事故發(fā)生為核心的主動安全技術(shù)已成為現(xiàn)代汽車技術(shù)發(fā)展的重要方向。因此,研制一種主動安全系統(tǒng),為駕駛員提供自動報警與輔助制動的服務,可以彌補現(xiàn)有安全系統(tǒng)中存在的不足,有利于維護人們的生命與財產(chǎn)安全。
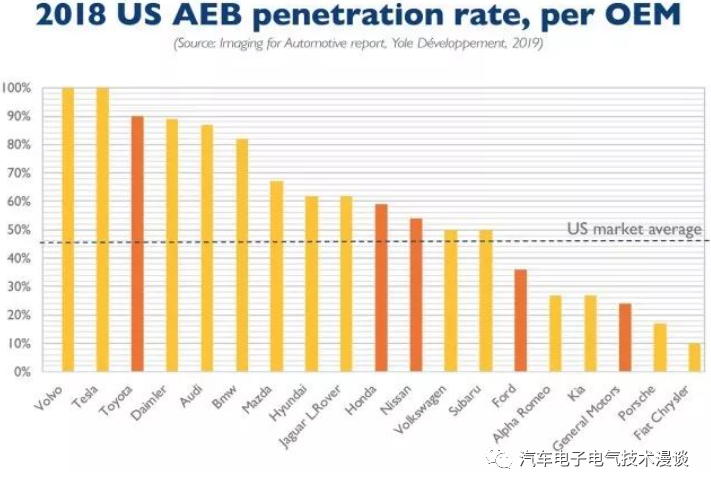
隨著主動安全技術(shù)的不斷發(fā)展,自動緊急制動AEB對行車安全的提升有顯著效果,美國公路安全保險協(xié)會研究發(fā)現(xiàn)90%的交通事故是由駕駛員的注意力不集中而引起的,裝備了AEB的車輛可以減少27%的事故發(fā)生率,其中追尾減少率為38%,并能明顯減少事故傷亡。隨著現(xiàn)實需求帶來的汽車安全技術(shù)的發(fā)展,汽車自動緊急制動系統(tǒng)AEB越來越多的應用到車輛上,已得到大量應用。近些年在保險業(yè)、汽車安全組織和政府的共同推動下,AEB成為了越來越多車型的標配,各家車廠都積極發(fā)展、配備到近幾年出廠的新車上,紛紛將AEB功能等作為新車上市的重要賣點之一。隨著自動駕駛的發(fā)展,AEB可能還會向著更高性能發(fā)展。
如今,國外AEB技術(shù)已發(fā)展成熟,并大范圍普及,不過很遺憾,國內(nèi)在這方面還沒引起足夠的重視,希望未來這一情況有根本改變。
目前國際上沒有統(tǒng)一的名稱及系統(tǒng)運行標準,因此各汽車廠商的自動緊急制動系統(tǒng)的名稱都不一樣,如:Volvo-City Safety、Mercedes-Benz-ABA、Volkswagen-Front Assist 、Subaru-Eye Sight、Honda-CMBS、Nissan-FEB、Toyota-TSS、Lexus-LSS+、Lincoln-EBA、Ford-ACS主動式行車防護系統(tǒng)、Chevrolet-AAB、Citroen-EBA、Peugeot-EVA等,豐田的預碰撞安全系統(tǒng)稱為Pre-Collision System,簡稱PCS;?本田的CMBS(Collision Mitigation Brake System)、通用的LSFAB(Low Speed Forawrd Automatic Braking、Mitsubishi的FCM主動式智慧剎車輔助系統(tǒng)以及奔馳的pre-safe系統(tǒng)等,都是與AEB功能相同的應用,工作原理也是相同的,但造成了普通購車消費者對自動緊急制動系統(tǒng)的概念及其效果模糊不清。
詳細分析了國內(nèi)外現(xiàn)有AEB標準及法規(guī),重點介紹了中國AEB標準制定進展及計劃,通過對比分析國外相關(guān)AEB標準和法規(guī),對其關(guān)鍵技術(shù)指標在中國的適用性進行分析研究,并對目前在研的標準及法規(guī)進行梳理,通過對重點AEB標準及法規(guī)的深入剖析, 研究其關(guān)鍵技術(shù)指標在中國的適用性,?結(jié)合中國實際交通情況,制定一個指標合理、 經(jīng)濟可行的試驗方法國家標準, 將推動、 引導和規(guī)范中國汽車主動安全技術(shù)發(fā)展, 完善汽車安全性能, 改善道路交通安全。
本研究開發(fā)了一種汽車主動安全技術(shù)的汽車自動緊急制動(AEB)行人檢測系統(tǒng),它包含軟體假人目標、假人驅(qū)動裝置及其控制系統(tǒng),并且開發(fā)的假人目標具有典型的人體特征及紅外反射特性。可按照2018版中國新車評價規(guī)程(C-NCAP)的AEB行人系統(tǒng)測試場景的要求,精準地驅(qū)動假人目標行走,并可與操控測試車輛的駕駛機器人實時通訊。開展了對假人目標行走距離、假人目標行走速度和與駕駛機器人的聯(lián)動實驗。結(jié)果表明該系統(tǒng)與駕駛機器人聯(lián)動實驗一次成功率達到90%以上,對假人行走距離和速度控制的準確度96%,對假人與車輛碰撞位置的準確度達96%;該AEB行人檢測系統(tǒng)可準確復現(xiàn)行人危險工況,具有較高的測試精度。因此,該AEB行人檢測系統(tǒng)可用于開展C-NCAP(2018)行人測試實驗,作為車輛AEB系統(tǒng)功能評測及相關(guān)產(chǎn)品開發(fā)有效工具。
三 定義
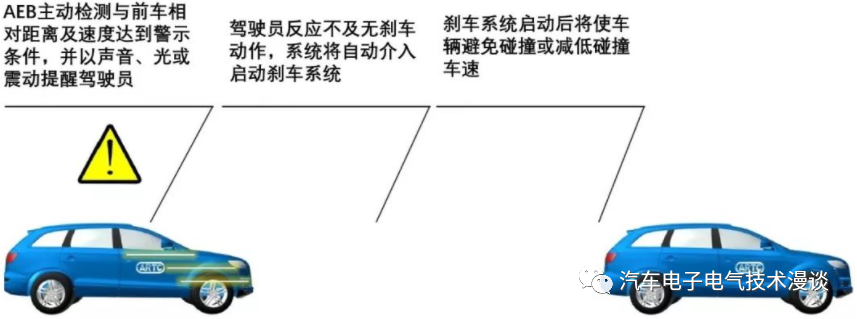
汽車自動緊急制動系統(tǒng)即AEB(Autonomous Emergency Braking)系統(tǒng)是一個輔助剎車的電子系統(tǒng),是一種汽車主動安全技術(shù)。AEB系統(tǒng)是協(xié)助駕駛員進行緊急剎車的主動安全配備裝置,是指車輛在非自適應巡航的情況下正常行駛,如車輛遇到突發(fā)危險情況或與前車及行人距離小于安全距離時主動進行剎車(并不一定能夠?qū)④囕v完全剎停),避免或減少追尾等碰撞事故的發(fā)生,從而提高行車安全性的一種技術(shù)。
AEB從工作原理上講,就是一個感知-運算-執(zhí)行的閉環(huán)循環(huán)過程,基于環(huán)境感知傳感器(如:毫米波雷達或視覺攝像頭等)感知前方可能與車輛、行人或其他交通參與者所發(fā)生的碰撞風險,并通過系統(tǒng)自動觸發(fā)執(zhí)行機構(gòu)(如:電子穩(wěn)定程序ESP)來實施制動,以避免碰撞或減輕碰撞程度;從汽車工程學上講,就是基于車內(nèi)傳感器各種監(jiān)測,配合系統(tǒng)控制器控制,與之配套的運行軟件和算法組成的綜合型電子控制系統(tǒng)。
AEB是一種預防性的主動安全技術(shù),也是作為ADAS的一項應用而開發(fā)的,可自動探測前方障礙物、判斷碰撞風險,必要時發(fā)出報警及自動實施制動旨在事先識別碰撞風險,完全規(guī)避碰撞發(fā)生或盡最大可能地減輕碰撞的強度,從而避免車輛追尾,或與行人及其他交通參與者發(fā)生碰撞事故。AEB彌補了人和車的弱點,變被動為主動,變?nèi)藙訛樽詣樱瑥母旧隙笾屏塑嚨準鹿实陌l(fā)生,把駕車的安全性提高到一個空前的高度,實現(xiàn)了真正意義上的主動安全。
AEB系統(tǒng)是智能轎車的一部分,是防止汽車發(fā)生碰撞的一種智能裝置。它能夠自動發(fā)現(xiàn)可能與汽車發(fā)生碰撞的車輛、行人或其他障礙物體,發(fā)出警報或同時采取制動或規(guī)避等措施,以避免碰撞的發(fā)生。配備了城市防撞系統(tǒng)的車輛,當有車輛或行人突然靠近,司機沒有采取任何措施的情況下,車輛會自動剎車,從而有效的避免交通事故的發(fā)生。并且汽車防撞系統(tǒng)在汽車倒車追尾車禍即將發(fā)生時,不但可以使車輛主動地、智能地實施自動制動,甚至駕駛員操作出現(xiàn)失誤,車禍將不可避免的發(fā)生時,也可以實現(xiàn)自動剎車,主動防撞,降低事故發(fā)生概率。
AEB行人保護系統(tǒng)主要用于保護行人等易受傷害的道路使用者,該系統(tǒng)通過車輛上集成的傳感器識別并跟蹤交通環(huán)境中的行人,計算其相對車輛的運動軌跡,以此判斷是否有碰撞的危險,若有危險則系統(tǒng)會自動采取制動使車輛停止,同時向駕駛員發(fā)出警告。當駕駛員走神或者路邊突然竄出來一個人的時候,這AEB可以最大限度進行緊急剎車。
要注意碰撞預警(collision warning)和碰撞緩和(collision mitigation)系統(tǒng)之間的區(qū)別:預警系統(tǒng)將警告駕駛員即將發(fā)生碰撞,但不會采取諸如剎車之類的規(guī)避行動;緩和系統(tǒng)將提醒駕駛員,如果不采取任何措施,該系統(tǒng)將進行剎車,以避免或減輕碰撞的嚴重程度。
無論是采用何種自動緊急制動系統(tǒng),由于其系統(tǒng)探測傳感器頻率、探測傳感器信號穩(wěn)定性、車內(nèi)數(shù)據(jù)信號傳遞抗干擾性以及系統(tǒng)整體運算速度、系統(tǒng)配置協(xié)調(diào)性的不同,各車型的系統(tǒng)反應時間、同步速度都不會相同。再加上當前車輛行駛速度、輪胎與路面摩擦力系數(shù)等因素,導致車輛最終的制動效果會有非常大的差異。此類系統(tǒng)運行速度取決于車型或版本的選擇。但無論如何,這個系統(tǒng)已經(jīng)被證實可以有效地防止汽車碰撞或減小碰撞損失。
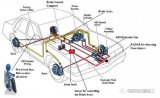
四 組成
自動緊急制動系統(tǒng)AEB主要由行車環(huán)境信息采集單元(傳感器)、電子控制單元(中央處理器)和執(zhí)行單元(執(zhí)行機構(gòu))三部分組成,包含報警與緊急制動兩大系統(tǒng),主要由測距模塊、數(shù)據(jù)分析模塊和執(zhí)行機構(gòu)模塊三大模塊構(gòu)成。AEB系統(tǒng)還可看成由兩個系統(tǒng)組成,包括車輛碰撞迫近制動系統(tǒng)(CIB)和動態(tài)制動支持系統(tǒng)(DBS),其中CIB系統(tǒng)會在追尾以及駕駛員未采取任何行動的情況下,會緊急制動車輛,而DBS在駕駛員沒有施加足夠的制動行動時,會給予幫助避免碰撞。能對前方車輛、自行車、行人預警,能對前方動態(tài)、靜態(tài)車輛實施主動制動處理。
1.行車環(huán)境信息采集單元對行車環(huán)境進行實時檢測,得到相關(guān)行車信息。主要由測距傳感器、車速傳感器、油門傳感器、制動傳感器、轉(zhuǎn)向傳感器、路面選擇按鈕組成。
(1)測距模塊也稱為感知模塊,是系統(tǒng)的AEB系統(tǒng)關(guān)鍵部件。感知模塊完成防撞探測的數(shù)據(jù)采集工作,可以提供前方道路全面、準確、實時的圖像與路況信息,完成外部環(huán)境數(shù)據(jù)的采集,例如汽車與前方車輛或者障礙物的距離信息。目前汽車防撞探測主要是采用紅外、超聲波、攝像頭、激光、雷達等一些測量方式,實現(xiàn)形式主要有激光雷達、毫米波雷達+激光雷達+攝像頭、中距離雷達+前方攝像頭、單攝像頭以及立體攝像頭等。
其核心包括毫米波雷達、激光雷達和視頻系統(tǒng)等,采用雷達測出與前車或者障礙物的距離。其中紅外、激光、攝像頭等采用光學技術(shù),價格低廉且技術(shù)簡單,但全天候工作效果不好。
簡單來說AEB系統(tǒng)就是通過檢測方式來干預剎車系統(tǒng),起到剎車輔助作用,然而這樣的系統(tǒng)首先要做的就是檢測。目前常用的兩種檢測方式為攝像頭和豪米波檢測,但是這兩種檢測方式都有一個致命的缺陷:在前方障礙物較多時無法正確分辨!這也是當前很多AEB系統(tǒng)失效的主要原因!AEB系統(tǒng)主要是對車輛和行人進行有效識別,但對于自行車、電瓶車、三輪車、小動物等其他障礙物的識別,還沒有哪一家有相對穩(wěn)定的產(chǎn)品。
①紅外線
任何物體無論如何都會發(fā)出紅外線,利用紅外線傳播不擴散原理依據(jù)測量光往返目標所需的時間來計算判斷測量目標距離叫紅外測距。
當熱成像儀“看到”熱量時,可以在包括夜間等惡劣條件下,通過陽光、車燈的光線和霧來檢測行人。它在黑暗中能看到的距離是普通大燈的四倍。一般而言,熱成像儀在弱光和雜亂環(huán)境下能w更好地對行人進行識別和分類,熱成像也會感知到部分被遮擋的行人。在目前可用的解決方案中,熱成像技術(shù)是有前途的,它能夠為RGB攝像頭和雷達提供補充數(shù)據(jù)。與常規(guī)的RGB攝像頭相比,熱成像技術(shù)在對行人進行檢測和分類方面要好得多,因分類是基于對象的熱信號而不是可見光。但熱成像儀最常見問題是成本,如果OEM在車輛上添加熱成像儀來實現(xiàn)有效的AEB-P而價格低廉將提高使用率,激光雷達也是這種情況。除了作為被動傳感器,沒有什么能比熱成像儀更好地檢測到行人之外,還提到了AI對熱成像的影響,將AI應用于熱圖像捕獲的性能要優(yōu)于傳統(tǒng)的RGB攝像頭。
②激光雷達??
測距原理是由激光器發(fā)射激光束,遇到目標時發(fā)射回來,光學接收系統(tǒng)中的光學探測器將接收到的激光束與原發(fā)射激光束通過混頻器轉(zhuǎn)換為電信號,通過光束以及往返時間差計算得出所探測的目標距離。
激光具有相干性好、高單色性以及方向性好等優(yōu)點。激光波束近似直線,波束能量比較集中,很少擴散,傳輸距離較遠,具有較高的測距精度,可以快速得到精確環(huán)境信息;從傳感器成本和性能角度看,激光雷達精度高、體積較小、質(zhì)量輕,但是激光雷達成本較高,探測角度小,受環(huán)境影響大,抗干擾性差,短期內(nèi)尚不能廣泛應用。目前國內(nèi)有部分廠商能夠生產(chǎn)激光雷達。
大陸的SRL有3線(博世LRR2是4線),最大探測距離只有13.5m,僅限于低速行駛場景,如防止在交通堵塞時的疏忽,但相比用于泊車輔助的超聲波雷達已經(jīng)是非常大的進步了(探距小于1m)。基于SRL的AEB系統(tǒng)旨在防止時速30km/h的碰撞,并可以緩解50km/h的碰撞程度。SRL的HFoV為27°、VFoV為12°,發(fā)射三個905nm激光束,頻率為50Hz。最新版本的SRL現(xiàn)在的探測距離已達到了50m,AEB有效工作范圍為50km/h,最高工作范圍高達80km/h。
海拉24GHz的MRR,探測距離為150m(博世的LRR2,探測距離達200m),因采用了CMOS技術(shù),可以將雷達功能進一步集成到單個MMIC,傳感器模塊尺寸變得更小,也降低了BOM成本,MRR的成本迅速降到了約$50。降低成本的另一個原因是得以與LRR共用76-79GHz頻率。同時MRR的探測距離可達200米,可以在時速高達160km/h(99英里/小時)下滿足AEB的要求,幾乎可以滿足任何高速公路(德國高速公路才需要專用的LRR)。AEB隨NCAP要求不斷提高的加緊迅速得到了普及,因規(guī)模效益MRR/LRR的成本降了下來。成本下降推動了平價車型也得以廣泛采用MRR,MRR在汽車雷達中的份額超過了LRR。
用于AEB的單個雷達的部署速度下降得很快,奔馳原本采用的是Veoneer的24GHz SRR,但性能逐漸不再能滿足要求了,因此沒有主機廠繼續(xù)采用這種方式了。AEB
Interurban的實施也意味著SRL不再合適了,需要具有更強探測能力的MRR。與SRL相比,MRR具有更遠的探測距離、更寬的FoV和更高的分辨率。
③超聲波
一般是指頻率20KHz以上的機械波,具有聲波折射、反射、干涉等基本物理特性。工作時,超聲波發(fā)生裝置向某一方向不斷發(fā)射出某一頻率超聲脈沖波,遇到被測物體則產(chǎn)生反射回波,由超聲波接收裝置接收反射回波并將其轉(zhuǎn)變?yōu)殡娦盘枺鶕?jù)接收和發(fā)射超聲波所用的時間差以及聲速,就可以測得車輛和目標物體之間的距離。
超聲波測距方法簡單,成本低,具有較強的穿透性以及反射能力,但探測距離較短,最佳距離為4~5m,對于遠距離目標,不夠靈敏,影響測量精度,而且傳輸速度容易受到天氣狀態(tài)的影響,這使得超聲波在高速公路測距的應用具有一定的局限性。另一方面,超聲波散射角大,方向性較差,在測量較遠距離的目標時,其回波信號會比較弱,影響測量精度。因此,超聲波一般用作短距離的車輛倒車防撞雷達以及側(cè)面防撞雷達。
④毫米波雷達??
毫米波是指波長在1~10mm(頻率在30~300GHz)之間的電磁波。毫米波雷達主要是通過對目標物發(fā)射電磁波并接受回波來獲得目標物體的距離、速度和角度。克服了上述幾種探測方式在汽車防撞探測中的缺點,具有穩(wěn)定的探測性能和良好的環(huán)境適應性,毫米波雷達不易受對象表面形狀和顏色的影響,也不受大氣流的影響;還具有環(huán)境適應性能好的特點,因為雨、雪、霧等對毫米波雷達的干擾小。毫米波雷達結(jié)構(gòu)簡單、天線部分尺寸小、發(fā)射功率低、分辨率和靈敏度高、波束窄而具備高精細細節(jié)分辨的能力。毫米波雷達的感測距離長,受天氣影響小,在測距方面精確度較高,成為主動防撞雷達的首選,也是AEB的首選傳感器。它不僅可測量目標距離,還可測量目標物體的相對速度及方位角參數(shù),是未來無人自動駕駛的必備傳感器,但對于行人、自行車等較小的障礙物識別能力較弱。毫米波雷達開發(fā)難度較大且成本較高,相比激光,其傳播特征受氣候影響小,具有全天候特性;相比微波,則更容易小型化。
毫米波雷達測距方式,主要由連續(xù)波雷達測距和脈沖雷達測距兩種方式。
在具體技術(shù)上,脈沖雷達測距存在一定的難度,主要是產(chǎn)生并發(fā)射大功率信號對硬件電路要求高,一般的硬件無法實現(xiàn),具有一定的難度。
連續(xù)波雷達測距使用較多。工作時,毫米波發(fā)射源信號經(jīng)環(huán)流器從天線向外發(fā)射具有一定斜率的連續(xù)調(diào)頻信號,當遇到前方目標時,會產(chǎn)生與發(fā)射信號具有相同斜率的延時回波信號,回波信號經(jīng)接收天線進入混頻器,混頻器將發(fā)射源信號與回波信號進行混頻處理,從而得到其差頻信號,差頻信號再輸入多普勒放大器,放大后的信號經(jīng)整形電路整形,輸出矩形脈沖式的信號,轉(zhuǎn)換出的信號進入計數(shù)器計數(shù),計算出與目標的速度和距離信息。如采用調(diào)頻連續(xù)波(FMCW)測距方式,雷達發(fā)射連續(xù)三角波,該種雷達結(jié)構(gòu)簡單,應用性強。
用毫米波雷達測距具有探測性能穩(wěn)定的特點。目前具備AEB功能的家用量產(chǎn)車,多數(shù)都會采用一顆長距離雷達搭配兩顆短距離雷達的方案。
博世目前主流的傳感器就是第四代毫米波雷達和第二代攝像頭(包含單目、雙目),目前在售量產(chǎn)車型上搭載的博世系統(tǒng)基本都是這兩代傳感器。博世已經(jīng)具備了量產(chǎn)第五代毫米波雷達以及第三代攝像頭的能力,小鵬全新車型P7是首款搭載了5個博世第五代毫米波雷達。
汽車毫米波雷達有不同的工作頻率,比較常見的汽車毫米波雷達工作頻率在24GHz、77GH、79GHz這三個頻率附近,工作頻段為21.65-26.65GHz和76~81GHz。77GHZ雷達核心技術(shù)被Bosch、安波福、Denso、TRW、Conti等國際巨頭壟斷,國內(nèi)廠商面臨著技術(shù)封鎖、器件禁運等困難,短期內(nèi)難以實現(xiàn)突破。而24GHZ產(chǎn)品目前國內(nèi)廠商已有較多的研發(fā)積累,有望率先問世。
各國對主動安全的重視,AEB系統(tǒng)逐漸成為汽車標配,對AEB系統(tǒng)中的主要感知器件---毫米波雷達的剛性需求,極大推動了毫米波雷達的普及。
⑤攝像頭
成本低,體積小,功耗小,可識別行人、自行車等復雜障礙物,缺點也非常明顯,受惡劣天氣影響較大。當光線較暗以及大雨、霧霾、大雪等惡劣天氣發(fā)生時,將使得系統(tǒng)性能大大降低。
與手機攝像頭不同,汽車攝像頭的設(shè)計要求更嚴格,尤其在低照射強度下的性能、動態(tài)范圍、紅外(near infrared,NIR)敏感性、在寬溫度范圍下(-40℃到+105℃)的圖像質(zhì)量、長期可靠性、圖像數(shù)據(jù)完整性和穩(wěn)健性等方面。攝像頭必須具有能夠檢測在不斷變化的環(huán)境光水平下的物體的動態(tài)范圍,具有足夠的FoV覆蓋道路寬度,并且能夠抵消隱藏FoV中的物體的偽影。圖像和對象識別處理能力也很重要。所有汽車應用的圖像傳感器都要求符合AEC-Q100以及在ISO/TS 16949認證的設(shè)施中生產(chǎn)。
物體識別是檢測前方的物體并且能夠識別附近的VRU和其它車輛的關(guān)鍵要求。影像辨識模塊是透過攝像頭,利用所得畫面的差別,經(jīng)過計算機判斷來識別。和毫米波雷達相比,影像辨識在車道、障礙物識別等方面有優(yōu)勢。但是作用距離和測距精確度不如毫米波雷達,并且容易受到光照天氣的影響。
采用視覺方式來實現(xiàn)AEB系統(tǒng),成為了眾多廠家開發(fā)的新熱點。但基于攝像頭的系統(tǒng)在檢測范圍和速度方面受到限制。實現(xiàn)上主要分為單攝像頭和立體攝像頭兩種。
采用單攝像頭的AEB系統(tǒng),就是由單個向前拍攝的攝像頭模塊來實現(xiàn)AEB功能。該攝像頭被安裝于內(nèi)后視鏡底座的附近,為的是能夠獲得更好的“視野”。同時也不能偏左或者偏右太多。攝像頭坐標系與車輛坐標系偏離過大會對距離估算產(chǎn)生較大的影響。
單目自動緊急制動系統(tǒng)是通過機器視覺的原理,通過大量數(shù)據(jù)的學習,對前方目標進行標定和判斷。雖然可以判斷出前方物體的種類,但也導致了幾點不足。
第一,基于單目攝像頭的自動緊急制動系統(tǒng),需要大量數(shù)據(jù)進行學習和訓練,這就意味著新入局的公司自然在數(shù)據(jù)積累上與傳統(tǒng)廠商有巨大差距。
第二,對于一些樣本數(shù)量較少或難以提取有效特征的情景和物體(如動物,路障,不規(guī)范的交通工具,隔離帶,植物,坑洞等),單目系統(tǒng)由于學習樣本的局限性無法做出有效識別。
第三,由于單目系統(tǒng)的判定過程,需要通過攝像頭拍攝的照片進行分析,先對學習過的障礙進行識別,再分析距離,它的工作準確率對照片的質(zhì)量有著較高的要求;而行人識別等功能的準確率受到陽光直射、夜晚光線昏暗或者城市燈光等因素干擾,只能有條件地工作。
單攝像頭模塊橫向體積小,內(nèi)部計算量小,成本低,缺點比較明顯:對于距離不敏感。
采用立體攝像頭的AEB系統(tǒng),則是相對于單攝像頭多了一個鏡頭。依據(jù)仿生學原理,模仿人的眼睛實現(xiàn)一個立體視覺的效果,從而最終實現(xiàn)AEB功能。這種方式對于距離判斷會比較精確。
雙目攝像頭在根本原理上與單目攝像頭有著比較大的不同。它通過視差原理,來判斷觀測點與目標之間的距離,也就可以判斷行駛車輛前方的物體形狀,距離,運動速度。
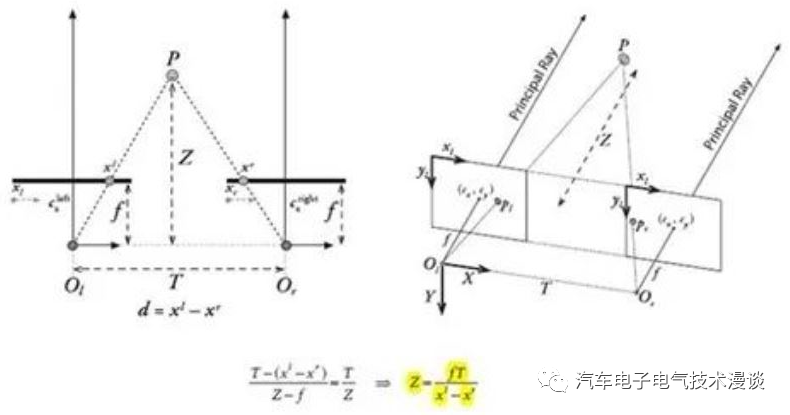
(雙目攝像頭原理圖)
從鏡頭選擇到相機調(diào)試,再到相機結(jié)構(gòu)設(shè)計的所有技術(shù)儲備,已經(jīng)能做到24小時準確成像。在算法上,與國際上基于邊緣立體匹配算法的雙目產(chǎn)品不同,算法所產(chǎn)生的深度圖與深度計算是基于面點的,因此每一個視角每一點都有準確的距離測算,整體準確率和魯棒性都獲得了較大的提升。
其缺點是:由于兩個攝像頭之間要保證一定的距離,所以存在橫向體積較大。而且對兩個圖像的綜合運算是比較復雜的算法問題。另外和單攝像頭方式相比,成本也是比較高的。立體攝像頭的整體布置要求和單攝像頭保持一致,而鏡頭之間的距離是一個重要的參數(shù),關(guān)系到感測的距離。通常,兩鏡頭間距越小,焦距就越大,拍攝物體就越遠;反之,就越近。立體攝像頭系統(tǒng)因其立體測距原理較單攝像頭的距離估算更加可靠、精確,短期內(nèi),依舊是前者更靠譜。
大部分受到成本的限制,使用一個單目就足以滿足3星或4星安全評級標準。比如在Mini和寶馬2系中,Veoneer基于Mobileye的單目甚至可以執(zhí)行一些stop-go的TJA功能。
博世前兩代攝像頭已經(jīng)能夠做到對交通標志、車道線、行人、騎行者等進行識別,可為ACC自動適應巡航、自動切換遠近光燈、自動緊急剎車等功能服務,第三代攝像頭在此基礎(chǔ)上更進一步,各方面性能都有提升。
博世第三代攝像頭像素提高到200萬,最大水平視角達到100°,在75m范圍內(nèi)可以通過立體視覺產(chǎn)生視差進行空間檢測。其次,博世第三代攝像頭信息處理應用了密集光流檢測法,其可識別路邊打傘的目標人群,能清晰地做好輪廓區(qū)分;同時,運用人工智能算法,將卷積神經(jīng)網(wǎng)絡(luò)算法集成在SOC(服務器操作中心)上,加強對物體的檢測;最后,將密集光流檢測和紋理檢測結(jié)合起來,博世第三代攝像頭可支持對紅綠燈的檢測。
奔馳現(xiàn)在只使用立體攝像頭模塊作為其防碰撞輔助系統(tǒng)的標配。
為了保護研究中最易受到車輛碰撞的弱勢道路使用者(VRU),要求AEB要識別行人
和自行車騎行者,這就直接推動了主機廠增加一個前風擋攝像頭模塊,用來進行物體識別,防止與行人和自行車騎行者碰撞。AEB要求還需要具有夜間的性能,這又讓攝像頭的動態(tài)范圍增加。因此對SRL的需求已明顯減少,越來越多地由前風擋攝像頭來執(zhí)行。基本上自2016年和2018年兩次對AEB要求的增加,許多主機廠已經(jīng)從SRL轉(zhuǎn)變?yōu)榈綌z像頭戰(zhàn)略了。
攝像頭還需要提高分辨率和幀速率,以便對與AEB在同一傳感器上運行的其他ADAS應用進行傳感。前風擋的單目成本在100-150美元之間,cover一系列不同的ADAS應用,不僅僅是AEB。這種多功能傳感器比SRL綜合成本效益更高(雖然成本低于50美元,但只限一個應用)。AEB通常通過前風擋攝像頭與其他ADAS功能捆綁在一起,如LDW、自動遠光輔助(AHB)和TSR,以及部分交通擁堵協(xié)助的ACC低速狀態(tài)。
海拉24GHz的MRR系統(tǒng)僅通過在HUD上對駕駛員進行視覺預警來提供前方車輛的距離警報,警報可以根據(jù)駕駛員對即將發(fā)生的碰撞的反應時間(0.9-2.5s)而變化,但沒有提供制動控制。
視覺實現(xiàn)AEB系統(tǒng)功能,在技術(shù)上已經(jīng)不再是什么難題。成本和性能上的優(yōu)勢使其應用前景廣闊,必定是將來各大廠家的首選。
巴黎的某初創(chuàng)公司使用常規(guī)基于幀的視覺攝像頭的AEB系統(tǒng)與其他部署了事件驅(qū)動攝像頭進行了比較,視頻顯示,它的攝像頭在發(fā)現(xiàn)行人方面得分更高。
⑥CCD相機
CCD視頻測距通過CCD相機對行駛再高速公路上的車輛進行成像采集,將采集到的連續(xù)視頻圖像進行預處理以及特征提取,進而可以從圖像系列中檢測到車輛的速度。一般而言,視頻測距設(shè)備架在空中,安裝十分方便,而且受路面狀況的影響很小,實現(xiàn)車輛測速的同時還可以對汽車進行跟蹤監(jiān)控,可也有效獲取超汽車的完整信息。但是CCD視頻測距非常容易受到天氣狀況的影響,尤其是在沙塵、大霧、黑夜等惡劣天氣條件下,它的工作效能都將大打折扣。此外,對于高速公路上快速行駛的汽車來說,準確識別難度相對比較大。
2.電子控制單元接收行車環(huán)境信息采集單元的檢測信號,綜合收集到的數(shù)據(jù)信息,依照一定的算法對車輛行駛狀況進行分析判斷,同時對執(zhí)行單元發(fā)出控制指令。
數(shù)據(jù)分析模塊,也稱為算法模塊。對測距模塊傳回的實時數(shù)據(jù)進行分析、判斷。利用數(shù)據(jù)分析模塊將測出的距離與報警距離、安全距離進行比較,小于報警距離時就進行報警提示,而小于安全距離時即使在駕駛員沒來得及踩制動踏板的情況下,AEB系統(tǒng)也會啟動,對執(zhí)行機構(gòu)下達相應的指令,例如使汽車自動制動,減速等操作。
全球算法領(lǐng)域龍頭Mobileye基本壟斷了算法市場,但是由于中國更為復雜的交通情況,Mobileye在中國市場面臨很大挑戰(zhàn)。國內(nèi)部分廠商在算法方面擁有較強的自主技術(shù),在識別率方面與Moblieye差距不大。
感知模塊和算法模塊,構(gòu)成所謂的“預警系統(tǒng)” ,預警模塊門檻相對較低,客戶集中度不高,而執(zhí)行模塊由于真正涉及到駕乘者的人身安全與駕駛操控體驗,一方面整車廠肯定會牢牢把關(guān);另一方面對應的零配件廠一定是作為一級供應商存在于產(chǎn)業(yè)鏈之中,并且將會是向上下游并購延伸的最佳環(huán)節(jié)。
當數(shù)據(jù)從兩個不同的傳感器融合時,ADAS?ECU用于收集和處理原始傳感器數(shù)據(jù),然后決定是否激活制動系統(tǒng)。ECU也是自動駕駛開發(fā)的源頭,其中需要更多的傳感器甚至更高水平的執(zhí)行機構(gòu),因此AEB的增強甚至要用到像自動駕駛的那種高帶寬車載網(wǎng)絡(luò)。
在AEB中,有兩種不同形式的傳感器融合:不同位置的傳感器連接到單獨的ECU;或者傳感器和ECU都安裝在特定位置的單個模塊中。最常用的方法是前者,不同的傳感器連接到單獨的ECU,傳感器通常是前風擋攝像頭和前格柵或保險杠上的LRR。單獨ECU的優(yōu)點是可將它布置在兩種類型傳感器之間降低延遲,缺點是前風擋攝像頭需額外作散熱處理會比較缺乏空間,后者方法集成在一起也是為了應對這一挑戰(zhàn)。
后一種方法其實更有挑戰(zhàn)性,因為前風擋攝像頭可能影響到雷達的性能。一些供應商已嘗試開發(fā)此類集成傳感器和ECU的模塊,但性能都不太讓人滿意。Aptiv為沃爾沃提供RaCAM模塊,Nidec最近也推出了攝像頭和雷達一體的模塊ISF(集成了傳感器融合)。
此外,恩智浦正在支持客戶將攝像頭數(shù)據(jù)融合到雷達模塊ECU中。Xilinx提供基于FPGA的器件用作傳感器融合中的硬件加速器,還支持客戶用來將數(shù)據(jù)融合到雷達模塊ECU中。
不同車型主動剎車系統(tǒng)采用的監(jiān)測方式不一樣,最后能夠?qū)崿F(xiàn)的功能也有很大差別。如果車輛僅僅采用了單個雷達或者單目攝像頭,能夠探測的范圍和距離就十分的有限;現(xiàn)在帶有主動剎車系統(tǒng)的車輛一般采用的都是雷達+單目攝像頭,基本能夠很好的識別車輛和行人;而一些高端車型像捷豹、路虎采用的就是雙目攝像頭,能夠準確的測量與障礙物之間的距離,預防碰撞效果更好。
3.執(zhí)行單元接收電子控制單元發(fā)出的指令,并執(zhí)行相應的動作。預警和剎車功能通過多個模塊實現(xiàn),如聲光報警模塊、LED 顯示模塊、自動減速和自動制動模塊等。
AEB的執(zhí)行機構(gòu)就是傳統(tǒng)汽車的制動系統(tǒng),是AEB系統(tǒng)的關(guān)鍵組成部分,AEB功能實現(xiàn)最終的輔助制動效果需要制動系統(tǒng)配合。
4.AEB系統(tǒng)儀表指示燈和組合儀表顯示
(1)當自動緊急制動系統(tǒng)關(guān)閉時儀表指示燈點亮
當該功能出現(xiàn)故障時儀表指示燈點亮,
當該功能正常開啟無指示燈
(2)功能激活時
中高速行駛,與前車跟車過近時,會在組合儀表上有如下圖片文字提示

AEB系統(tǒng)觸發(fā)時,會在組合儀表上有如下圖片文字的提示,并伴隨報警聲音

車輛行駛時潛在碰撞發(fā)生前系統(tǒng)自動緊急制動信息提示(如下)

AEB系統(tǒng)行人功能觸發(fā)時,會在組合儀表顯示屏上有如下圖片文字的提示,并伴隨報警聲音。
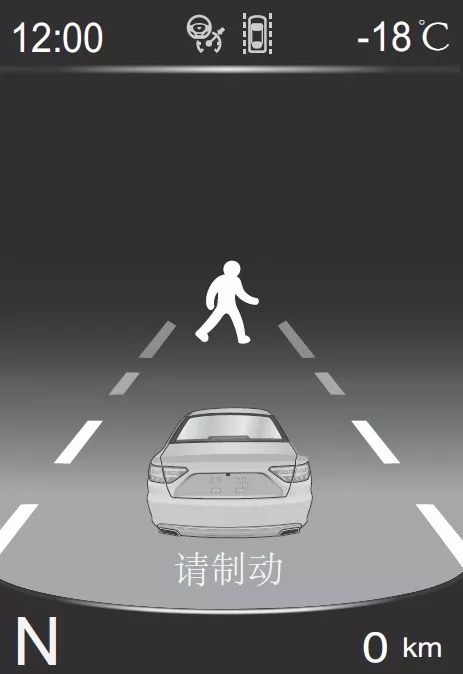
注意:當前方攝像頭被遮擋或者前方攝像頭功能受限時行人自動緊急制動不可用
五 原理
AEB主要是依靠車頭安裝的傳感器,一般采用毫米波雷達或光學傳感器(攝像頭)實時地監(jiān)測車輛前方行駛環(huán)境(與前車或者障礙物的距離),自動探測目標車輛或障礙物,結(jié)合車輛自身的動力系統(tǒng)、制動系統(tǒng)、穩(wěn)定系統(tǒng)等多個傳感器信息,利用安全距離模型參數(shù)實時計算當前條件下的安全距離,并與毫米波雷達或光學傳感器測出的距離進行對比來確定安全狀態(tài),通過雷達偵測與前車的距離,并由智能系統(tǒng)做出分析,檢測潛在的前向碰撞危險。當有危險情況發(fā)生的時候(汽車緊急剎車、有障礙物等),如果控制系統(tǒng)偵測到自車與障礙物的相對距離小于安全車距,可能與前方車輛發(fā)生追尾時,發(fā)出碰撞預警信號及時提醒駕駛員,即使在駕駛員沒有采取人為制動措施情況時,制動系統(tǒng)會立刻進入準備狀態(tài),在確保不出現(xiàn)輪胎打滑現(xiàn)象的前提下,并在可能發(fā)生碰撞危險時,系統(tǒng)會主動向車身電子穩(wěn)定系統(tǒng)發(fā)送油壓指令,通過車身各系統(tǒng)間協(xié)調(diào)工作,使車輛在瞬間切斷或降低動力并同時自動啟動車輛制動系統(tǒng),根據(jù)情況做出剎車或者減速的動作使車輛減速,當駕駛員制動過晚、制動力過小或者完全無制動措施時,來幫助駕駛員制動(剎車),以避免碰撞事故的發(fā)生或減輕碰撞后果。
當車輛低速行駛時,若駕駛員未對可能的撞擊作出反應,將觸發(fā)AEB自動緊急剎車系統(tǒng),系統(tǒng)可以主動進行剎車,避免事故發(fā)生,或有效減輕事故造成的傷害;當車速處于高速行駛時,而駕駛員的剎車力量又不足的情況時,系統(tǒng)會增加制動力,幫助駕駛
員降低車速,從而降低碰撞的風險。當駕駛員對于車內(nèi)警示燈和警示音沒有做出反應時,未采取任何避讓措施,且碰撞時間小于2.7s,碰撞事故迫在眉睫時,汽車自動緊急制動系統(tǒng)會在無駕駛員干預的情況下自動采取剎車措施,將進行全速自動緊急制動,盡可能地避免碰撞事故或減輕對駕乘人員的傷害程度。
利用數(shù)據(jù)分析模塊將測出的距離與警報距離、安全距離進行比較,小于警報距離時就進行警報提示;小于安全距離時即使在駕駛員沒來得及踩制動踏板的情況下,AEB系統(tǒng)會啟動,使汽車自動制動。在車輛即將與前方物體碰撞的情況下,AEB系統(tǒng)會自動施加制動壓力,當駕駛員踩下制動踏板的那一刻會立即提供最大的制動助力。如果駕駛員進行的轉(zhuǎn)向或制動干預不足以避免碰撞,自動緊急制動功能會施加最大的制動壓力,以幫助減輕碰撞所造成的影響。最后一步為防抱死制動(ABS),確保最大程度的減速。自動緊急制動是車輛安全系統(tǒng)應對緊急情況的最終解決方案。
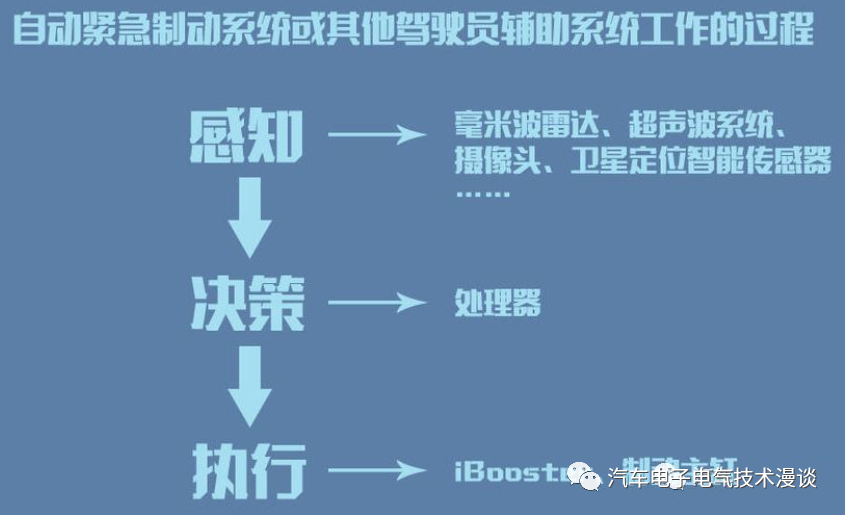
自動緊急制動系統(tǒng)或者是其他駕駛員輔助系統(tǒng)工作的過程都可看作是三個部分:感知、決策和執(zhí)行。感知即通過雷達、攝像頭等傳感器來采集信息;決策是處理器對傳感器采集到的信息進行分析、計算、處理,并決策出相應的指令;執(zhí)行即執(zhí)行器對決策指令進行動作執(zhí)行。
在感知層面,不同的供應商以及不同的車企都有著不同的技術(shù)路線,比如說特斯拉更多是依賴視覺感知,攝像頭是其主要的感知傳感器;博世則是單目攝像頭、雙目攝像頭、毫米波雷達或者多種傳感器數(shù)據(jù)融合來進行信息感知。博世提供多種技術(shù)路線的好處就是可以滿足各層級車型的需求,在不同成本下可以實現(xiàn)同樣的功能,當然,它的性能會存在區(qū)別。 1.工作原理 自動剎車輔助系統(tǒng)首先利用測距傳感器,一般為視覺攝像頭和毫米波雷達,測出與前車或者障礙物的距離、速度等。其工作原理一般分為兩種:
(1)基于安全距離的自動剎車輔助系統(tǒng):電子控制單元將測出的距離與報警距離、安全距離進行比較,小于報警距離時就進行報警提示,而小于安全距離時即使在駕駛員沒來得及踩制動踏板的情況下,AEB系統(tǒng)也會啟動,使汽車自動制動,從而保證安全。 (2)基于碰撞時間的自動剎車輔助系統(tǒng):電子控制單元將計算出的TTC值與設(shè)定好的閾值進行比較,當TTC值小于報警閾值時,系統(tǒng)將進行報警提示,當TTC值小于安全閾值時,系統(tǒng)將主動制動。
2.傳感器融合
通過不斷尋求改進對AEB的要求,NCAP旨在進一步降低碰撞發(fā)生率,從而減少傷害和死亡,因此傳感器融合一定是AEB持續(xù)改進的合理方向。自動駕駛感知技術(shù)所采用的傳感器主要包括攝像頭、激光雷達和毫米波雷達等。這些傳感器各有優(yōu)缺點,也互為補充,將這些傳感器組合在一起,相互克服各自的缺點也許是一種最穩(wěn)妥的方案。
AEB系統(tǒng)將激光與毫米波雷達復合應用在一起,充分發(fā)揮了不同雷達的優(yōu)勢,規(guī)避了各自的不足:激光雷達可以解決毫米波雷達易受目標漫反射及復雜環(huán)境下的干擾問題,毫米波雷達則解決了激光雷達易受惡劣天氣(雨、雪、霧及揚塵)影響問題。通過激光雷達與毫米波雷達的復合應用,以及科學合理的算法,不僅可以滿足防撞系統(tǒng)全天時、全天候、全車速工作不受影響,也解決了單一雷達易產(chǎn)生誤判,從而導致防撞系統(tǒng)易出現(xiàn)虛警及誤剎車問題。隨著AEB應對的駕駛場景更復雜,需要在更多駕駛場景中可靠性地檢測物體,能夠在更具挑戰(zhàn)的場景下識別不同的物體,例如在前方切入其它車輛,以及由于前方車輛駛出車道突然要面對一輛靜止的車輛,必須增加傳感器確保系統(tǒng)可以跟蹤更多目標,使得傳感器融合的情況增加。通常是雷達或LiDAR與前向攝像頭融合,這兩大類傳感器各有優(yōu)缺點,毫米波雷達和LiDAR組合在各種天氣條件下在測距方面性能卓越,但在物體分類上表現(xiàn)不佳,例如有報道稱基于雷達的AEB和ACC錯誤地檢測到前方有其它車輛,但事實上這些只是金屬防撞欄、金屬龍門標志和隧道墻的雷達反射。
通過增加前風擋攝像頭,它可以使車輛以更高的速度在車道線或道路曲率內(nèi)行駛而不會轉(zhuǎn)向其它車輛,這符合AEB Interurban的要求。2017年初特斯拉Model S和卡車相撞的那起致命碰撞事故,可能是LRR無法正確檢測和分類卡車的側(cè)面輪廓,并且由于卡車車身顏色是白色的,
又是個大晴天,前風擋攝像頭也未能進行識別,是漏判的結(jié)果。
AEB中經(jīng)常會出現(xiàn)許多對與不存在的物體發(fā)生可能碰撞誤報的傳感器讀數(shù),誤差讀數(shù)的水平可以在嵌入AEB功能的后裝行車記錄儀中看到,但缺少雷達或LiDAR的更精確的距離測量,通過傳感器融合,新的AEB系統(tǒng)可以更準確地檢測物體并減少誤報讀數(shù)。
上述事件使一些主機廠意識到需要傳感器融合來實現(xiàn)更強大的AEB,但AEB不斷提高的性能要求,將大大提高處理要求。不過,成本依然是廠家們關(guān)注的重點,要想快速推廣應用,只能夠大幅降低成本(雷達成本短時降低非常困難)。
目前AEB技術(shù)以雷達和影像辨識模塊為主流,在家用車領(lǐng)域一般是兩者相結(jié)合。多數(shù)車廠會選擇用雷達來偵測前方障礙物的相對距離和速度,并和影像模塊拍攝到的信息進行融合,再傳輸?shù)胶蠓降腅CU,分析出與前方障礙物之間的預計碰撞時間和安全距離,分析之后做出警示甚至于剎車。這一套信息和人非常相似——眼睛鼻子耳朵采集信息,大腦負責綜合處理。AEB系統(tǒng)通過結(jié)合前視雷達和攝像系統(tǒng)獲取的數(shù)據(jù),提供一個完整、精確、實時的前方道路影像。系統(tǒng)的工作需要前視77GHz(長距離)或24GHz(中距離)雷達和一個可伸縮攝像系統(tǒng)進行數(shù)據(jù)融合。
針對一般在城市場景中相對低速行駛的緊湊車型的成本問題,大陸有一款安裝在前風擋攝像頭MFL(多功能攝像頭和LiDAR)集成傳感器模塊,給豐田緊湊車型供應MFL,作為其Safety Sense C安全包的一部分。MFL模塊中使用的SRL探距為30m,能以80km/h的速度行駛,并可以更可靠地防止在30km/h下的碰撞。
AEB傳感器融合帶來的性能增強也涉及到了其它ADAS應用,這給主機廠一些可操作的空間。AEB和與之共用前風擋攝像頭的一些其它ADAS功能逐漸成為標配。主機廠想到AEB與ACC共用一個雷達,在標配AEB前提下,提供ACC的選配,ACC與AEB共用傳感器與處理器,作為提高銷售利潤的方式之一。由于MRR的能力有限,一些平價車型的ACC功能可能會僅限于低速狀態(tài)下的交通擁堵協(xié)助。
雷達+前風擋攝像頭組合增強版的AEB系統(tǒng)得以快速普及,這主要歸功于MRR的成本迅速降到了約$50,降低成本的另一個原因是與LRR共用76-79GHz頻道。本田此前為其CMBS(碰撞緩解制動系統(tǒng))安裝了單一LRR,為了在2015款Acura RLX中實現(xiàn)行人識別,又加裝了前風擋攝像頭。
E-NCAP五星安全標準要求滿足AEB Crossing、AEB Junction和AEB Head-On的標準,這些要求需要在通過交叉路口時檢測相鄰道路上的VRU,因此必須配備額外的傳感器來擴大FoV。在城市的交通路口行駛時,車輛通常以低速行駛,兩個前向雙側(cè)的SRR足以在前向預警中提供夠用的FoV了,MRR現(xiàn)在已有很大優(yōu)勢,同樣也適用于前向預警。大眾途銳Front Cross Assist和Intersection Assist系統(tǒng)在前保險杠上使用了兩個廣角安裝的雷達,可自動施加制動,并可以在時速低于10km/h時防止與前方穿過的車輛發(fā)生碰撞。
前向預警功能需要甄別不同的物體(例如車輛和行人),它們以不同的速度移動,挑戰(zhàn)在于選擇具有不同探測距離的的傳感器,可以使用最大探測距離30m的側(cè)向或廣角攝像頭來檢測穿過相鄰道路的行人。三目前風擋攝像頭模塊還可以加寬FoV,并為AEB Crossing提供物體識別功能。目前許多車型的前格柵上都安裝了前向攝像頭,駕駛員可以在顯示屏查看交通狀況。但作為環(huán)視系統(tǒng)的一部分,前向攝像頭并不具備物體識別功能。環(huán)視系統(tǒng)需要ECU從四個或更多個攝像頭接收數(shù)據(jù),然后可以將圖像數(shù)輸送到顯示器并提供物體識別能力,然后將數(shù)據(jù)發(fā)送到制動系統(tǒng)。但Clarion的環(huán)視系統(tǒng)可以進行一些移動物體檢測,但僅限于預警功能上。因攝像頭比雷達受到天氣和光照條件的影響較大,前向預警中可能也會進行傳感器融合。但雷達可能需要新的天線設(shè)計并且變得更加復雜,因此在前向預警這塊融合雷達可能會先從高端車型開始。
隨著AEB應對的場景復雜性提高,已越來越多地采用前風擋攝像頭與雷達的融合方式,但傳感器融合目前僅限于兩組獨立供應商傳感器的處理數(shù)據(jù)的高級融合,盡管原始像素級數(shù)據(jù)的融合是未來可能的方向。因此如何高效的融合多傳感器數(shù)據(jù),也就自然的成為了感知算法研究的熱點之一。
激光雷達和攝像頭如何在感知任務中融合,重點是目前主流的基于深度學習的融合算法。
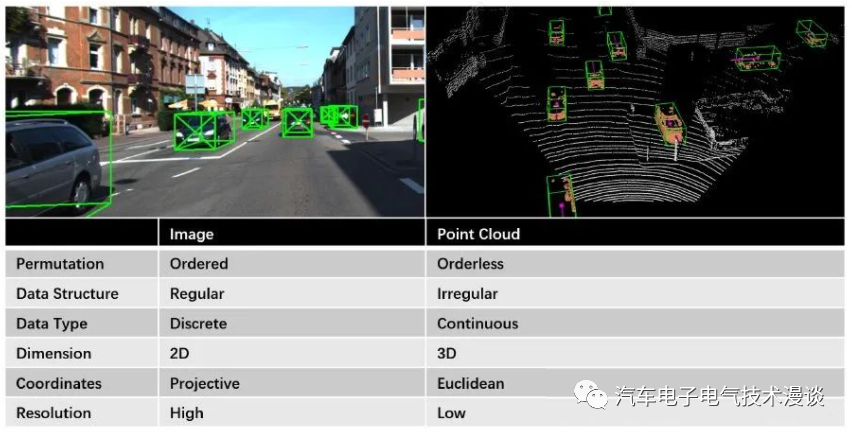
攝像頭產(chǎn)生的數(shù)據(jù)是2D圖像,對于物體的形狀和類別的感知精度較高。深度學習技術(shù)的成功起源于計算機視覺任務,很多成功的算法也是基于對圖像數(shù)據(jù)的處理,因此目前基于圖像的感知技術(shù)已經(jīng)相對成熟。圖像數(shù)據(jù)的缺點在于受外界光照條件的影響較大,很難適用于所有的天氣條件。對于單目系統(tǒng)來說,獲取場景和物體的深度(距離)信息也比較困難。雙目系統(tǒng)可以解決深度信息獲取的問題,但是計算量很大。激光雷達在一定程度上彌補了攝像頭的缺點,可以精確的感知物體的距離,但是限制在于成本較高,車規(guī)要求難以滿足,因此在量產(chǎn)方面比較困難。同時,激光雷達生成的3D點云比較稀疏(比如垂直掃描線只有64或128)。對于遠距離物體或者小物體來說,反射點的數(shù)量會非常少。
如下圖所示,圖像數(shù)據(jù)和點云存在著巨大的差別。首先是視角不同,圖像數(shù)據(jù)是真實世界通過透視投影得到的二維表示,而三維點云則包含了真實世界歐式坐標系中的三維信息,可以投影到多種視圖。其次是數(shù)據(jù)結(jié)構(gòu)不同,圖像數(shù)據(jù)是規(guī)則的,有序的,稠密的,而點云數(shù)據(jù)是不規(guī)則的,無序的,稀疏的。在空間分辨率方面,圖像數(shù)據(jù)也比點云數(shù)據(jù)高很多。
自動駕駛感知系統(tǒng)中有兩個典型的任務:物體檢測和語義分割。深度學習技術(shù)的興起首先來自視覺領(lǐng)域,基于圖像數(shù)據(jù)的物體檢測和語義分割已經(jīng)被廣泛和充分的研究。隨著車載激光雷達的不斷普及以及一些大規(guī)模數(shù)據(jù)庫的發(fā)布,點云數(shù)據(jù)處理的研究這幾年來發(fā)展也非常迅速。以物體檢測任務為主來介紹不同的融合方法。語義分割的融合方法可以由物體檢測擴展得到。
物體檢測的策略分為:決策層融合,決策+特征層融合,以及特征層融合。在決策層融合中,圖像和點云分別得到物體檢測結(jié)果(BoundingBox),轉(zhuǎn)換到統(tǒng)一坐標系后再進行合并,用到的大都是一些傳統(tǒng)的方法,比如IoU計算,卡爾曼濾波等,與深度學習關(guān)系不大文就不做介紹了,簡略講后兩種融合策略。
決策+特征層融合策略的主要思路是將先通過一種數(shù)據(jù)生成物體的候選框(Proposal)。如果采用圖像數(shù)據(jù),那么生成的就是2D候選框,如果采用點云數(shù)據(jù),那么生成的就是3D候選框。然后將候選框與另外一種數(shù)據(jù)相結(jié)合來生成最終的物體檢測結(jié)果(也可以再重復利用生成候選框的數(shù)據(jù))。這個結(jié)合的過程就是將候選框和數(shù)據(jù)統(tǒng)一到相同的坐標系下,可以是3D點云坐標(比如F-PointNet),也可以是2D圖像坐標(比如IPOD)。決策+特征層融合的特點是以物體候選框為中心來融合不同的特征,融合的過程中一般會用到ROI pooling(比如雙線性插值),而這個操作會導致空間細節(jié)特征的丟失。
特征層融合,也就是直接融合多種特征。比如說將點云映射到圖像空間,作為帶有深度信息的額外通道與圖像的RGB通道進行合并。這種思路簡單直接,對于2D物體檢測來說效果不錯。但是融合的過程丟失了很多3D空間信息,因此對于3D物體檢測來說效果并不好。由于3D物體檢測領(lǐng)域的迅速發(fā)展,特征層融合也更傾向于在3D坐標下完成,這樣可以為3D物體檢測提供更多信息。
3.為什么AEB的行人檢測經(jīng)常會失效?
最好的“行人保護”就是機動車不撞人,主動剎車輔助系統(tǒng)在幾年前剛配備在新車上時,一度被叫停,因為各家AEB采用的攝像頭的技術(shù)不一,導致并不是所有的AEB都具備行人探測功能,當時并沒有使用獨立的感知系統(tǒng)。如今最新的主動剎車輔助系統(tǒng)中,已經(jīng)可以利用攝像頭提早“嗅”到與行人發(fā)生碰撞的危險,隨后將接收到的信號傳至ECU,ECU判斷后下達指令給執(zhí)行機構(gòu),這時車輛會利用車內(nèi)的聲光提醒來警示駕駛?cè)耍绻{駛?cè)擞捎谄隈{駛等因素沒有做出任何應對措施,即將發(fā)生碰撞時主動剎車輔助系統(tǒng)會及時介入。但主動剎車輔助系統(tǒng)并不是立即剎停車輛,因為ECU會根據(jù)當前的車速和前后方的行駛狀況綜合考慮,下達減速行駛或緊急剎停的指令。
AAA對ADAS車輛進行了測試,重點放在了行人檢測上,用行人檢測(AEB-P)對AEB進行了測試,AAA的測試結(jié)果幾乎是毀滅性的。 AEB是ADAS的基礎(chǔ),但針對行人的AEB-P“比AEB難一個數(shù)量級”。為什么在閉環(huán)測試中,據(jù)稱配備了行人檢測的AEB的車輛會一個接一個地撞到測試假人? ADAS的目的是協(xié)助駕駛員提高道路安全,安全第一,然后是自動駕駛,行人安全應該是ADAS的主要關(guān)注點。AEB對于ADAS是至關(guān)重要的,沒有它,甚至無法想象實現(xiàn)自動駕駛,而且它是所有ADAS功能中最重要的,并且可能是挽救最多生命的應用程序。 調(diào)查結(jié)果促使提出了以下建議:“不要依賴行人檢測系統(tǒng)來避免碰撞。這些系統(tǒng)是備用的,而不是避免碰撞的主要手段。” 經(jīng)過測試的所有四款車型都采用了“攝像機+雷達”組合。而在這種組合下,是什么因素導致了AEB-P功能如此不一致呢?
問題是否來自成像傳感器或雷達的分辨率不足?
還是與傳感器融合算法有關(guān)?
使用熱成像傳感器可以幫助車輛在夜間看到行人。但是否可以簡單地通過添加另一個(具有不同模式)傳感器來解決這些問題呢?
將雷達和攝像頭組合在一起,融合的數(shù)據(jù)仍只能顯示出對車輛周圍環(huán)境有限的了解,也許是成本問題,OEM傾向于為ADAS使用成本更低的傳感器,鑒于ADAS功能有望在大眾市場普及,因此OEM不太可能會花更多的資金購買專用傳感器(激光雷達或熱成像儀),來降低AEB-P失效的可能。
在AEB的前提下,誤報本身會導致致命危險。雷達是AEB系統(tǒng)的關(guān)鍵部件,因為它可以測量碰撞時間,但雷達也容易出現(xiàn)誤報(false positives),例如將靜止的車輛誤認為危險物。因此為了限制誤報,最終不得不過濾掉大量數(shù)據(jù)。雷達也有很多噪聲,這也可能導致誤報,這就是為什么具有碰撞預警功能的車輛,會不時收到異常的碰撞預警。 在AEB的一般背景下,AEB-P大大地提高了性能要求,因為必須識別并跟蹤道路上的行人。雷達正變得越來越好,但對它與人類打交道時仍然缺乏信心,因此通常需要將其與攝像頭配合使用。雖然將攝像頭與AEB-P的雷達耦合起來是好的,但可能還不夠好,有太多環(huán)境條件限制了攝像頭的性能,這導致當前AEB-P系統(tǒng)的性能不佳。 基于攝像頭、雷達、攝像頭+雷達或攝像頭+激光雷達的AEB系統(tǒng)的成功在安全性方面得到了充分的證明。全球的追尾事故和死亡人數(shù)大約減少了50%,總體事故/死亡人數(shù)減少了10-15%。
但是,當同樣的AEB技術(shù)應用于行人檢測時,統(tǒng)計數(shù)據(jù)事故/死亡人數(shù)減少了10-15%就不那么令人滿意了。 AEB-P很難做到這一點問題出在第一代AEB系統(tǒng)的車輛前方相對狹窄的視場FoV,這是AEB系統(tǒng)無法了解車輛前方情況的主要原因。新一代AEB系統(tǒng)基于Intel-Mobileye EyeQ4或Visconti 4,它們通常會通過采用更多具有更寬FoV的攝像頭來改善參數(shù)。現(xiàn)在還不知道三目攝像頭相對于單目攝像頭的安全優(yōu)勢,但應該會更好。接下來是第三代AEB系統(tǒng)。這些系統(tǒng)將使用全環(huán)繞的攝像頭。這就是特斯拉將用其FSD計算機做的事情。通過了解整個環(huán)境,AEB應該隨著時間的推移而改善。 為了使AEB保護行人免受車輛的碰撞,必須做什么?要使AEB系統(tǒng)在行人檢測功能始終如一地發(fā)揮作用,需要做什么?認為有三種方法可以突破AEB-P的障礙: 首先,OEM可以使用更多相同數(shù)據(jù)、更多相同計算,這是與Mobileye推出的EyeQ4、EyeQ5和東芝推出的Visconti 4、Visconti 5保持同步的一種方法。價格大約在150美元左右,等待著在摩爾定律下繼續(xù)改善。 其次,OEM可能會尋求更好的數(shù)據(jù),或多或少地使用相同的計算。這種方法是由Flir、Prophesee和固態(tài)激光雷達公司提倡的。缺點是一開始可能要多花一些錢,但從營銷的角度來看,這些公司必須以當前的市場價格提供更好的系統(tǒng)。 第三種方法是創(chuàng)建更好的數(shù)據(jù)和更好的計算。稱其為“新范式”,是將新傳感器與新的計算方式相結(jié)合。這是神經(jīng)形態(tài)感知和計算的前景。一些公司已經(jīng)在傳感器和計算方面進行了創(chuàng)新,將創(chuàng)新的高光譜激光雷達+感知算法推向了市場。 為什么高速行駛時AEB會失靈?
目前在大多數(shù)車型的ADAS系統(tǒng)中,對靜態(tài)物體的處理都有些問題,由于雷達本身FOV的局限,一般它更擅長探測移動中的物體,對于雷達來說靜態(tài)物體多數(shù)就是那些道路兩側(cè)的樹木之類。
AEB一般在低速情況下(例如20mph)系統(tǒng)會表現(xiàn)的比較正常,但在高速狀態(tài)下(例如70mph)就要另當別論了。根本原因是ADAS是遵循“不傷害為先(first do no harm)”的開發(fā)哲學,車輛在低速下突然剎車不會有什么大問題,但在高速狀態(tài)下因制動距離發(fā)生極大變化,系統(tǒng)在車輛距離目標物的遠處就要開始剎車,這會導致系統(tǒng)產(chǎn)生對周邊狀況的一系列誤判,如會把鄰車道的物體識別在本車道上等,還要考慮到在高速下急剎車對駕駛員本身的傷害與追尾安全隱患之間的矛盾。
同樣地,AEB和ACC的問題類似,與LKA之間是彼此獨立的系統(tǒng),無法和攝像頭的數(shù)據(jù)很好地融合。因此現(xiàn)在多數(shù)AEB系統(tǒng)對遠處物體所在的車道、車輛與行人無法進行很好的區(qū)分與識別。所以,目前大多數(shù)AEB系統(tǒng)在高速行駛狀態(tài)下不會啟動。
總結(jié)下來大致有以下四點:
1、受路況、天氣等外界因素影響較大
2、受工作速度區(qū)間的限制(大致在5km/h-80km/h之間)
3、受光線影響較大,例如在黑暗或隧道中不起作用
4、自行車或輪廓模糊的行人不能有效識別
線控制動系統(tǒng)的AEB功能開發(fā)
1 AEB系統(tǒng)方案 ?
確定了以下AEB系統(tǒng)架構(gòu):傳感器選用77G毫米波雷達,主要用于目標檢測,具備探測距離遠、距離精度高、中遠程自動切換的優(yōu)勢, 可追蹤多達 64 個目標;制動執(zhí)行機構(gòu)為線控電子液壓制動系統(tǒng)EHB,并集成AEB功能算法;量產(chǎn)方案中ESC作為EHB的壓力備份冗余以及車輛信息交互。系統(tǒng)架構(gòu)原理如下圖所示。
?
2 環(huán)境感知及控制系統(tǒng)設(shè)計 ?
2.1 毫米波雷達測試及數(shù)據(jù)處理?
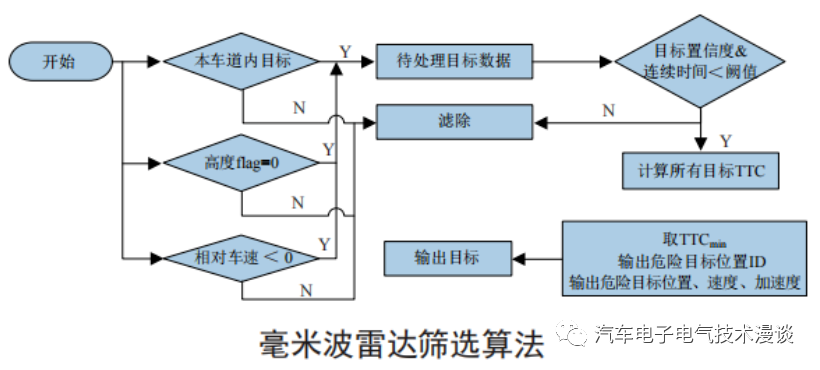
對毫米波目標CAN數(shù)據(jù)進行解析,獲取幀 ID、檢測到的目標個數(shù)、目標的序號及其置信度、 橫向位置、橫向速度、縱向位置、縱向速度等數(shù)據(jù)。對解析出來的檢測目標進行篩選,去除無效目標、高度目標、篩選出本車道的候選目標。
雷達在掃描期間偶爾會出現(xiàn)的非空信號目標,這種信號出現(xiàn)時間極短,連續(xù)性差,偶爾出現(xiàn)的連續(xù)數(shù)據(jù)在數(shù)值上跳動性較大,沒有實際意義,對目標車輛和防撞預警也會產(chǎn)生影響,因此需要去除。前方具備通過性的障礙物目標信息,比如高架橋、減速帶、限高桿、 指示牌等,這些目標出現(xiàn)在毫米波視場范圍內(nèi)時可能會造成車輛誤動作。下圖為毫米波雷達主要篩選算法。
2.2 毫米波雷達實車輸出測試?
毫米波雷達目標篩選和處理后,完成毫米波雷達裝車并進行各路況測試,同時編寫上位機程序用以顯示目標檢測效果。
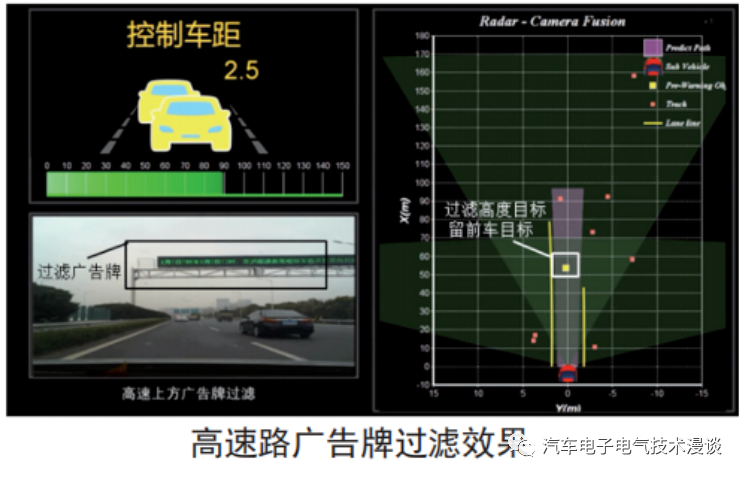
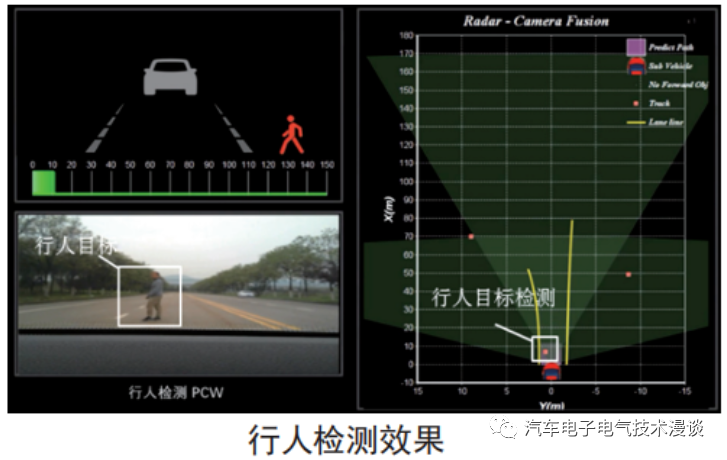
該雷達具備較好的目標識別能力,通過實際路況測試,對具備高度信息的障礙物(如廣告牌、減 速帶)能識別并過濾,對成人目標可做到有效識別。
在完成毫米波雷達輸出信號準確度確認后, 在毫米波雷達輸出CAN信息中增加一路CAN ID信息,其中涵蓋危險目標的碰撞時間(Time to Collision,TTC)計算等相關(guān)信息,可作為AEB功能算法輸入。
3 AEB 系統(tǒng)功能實車驗證 ?
3.1 AEB 系統(tǒng)控制策略設(shè)計
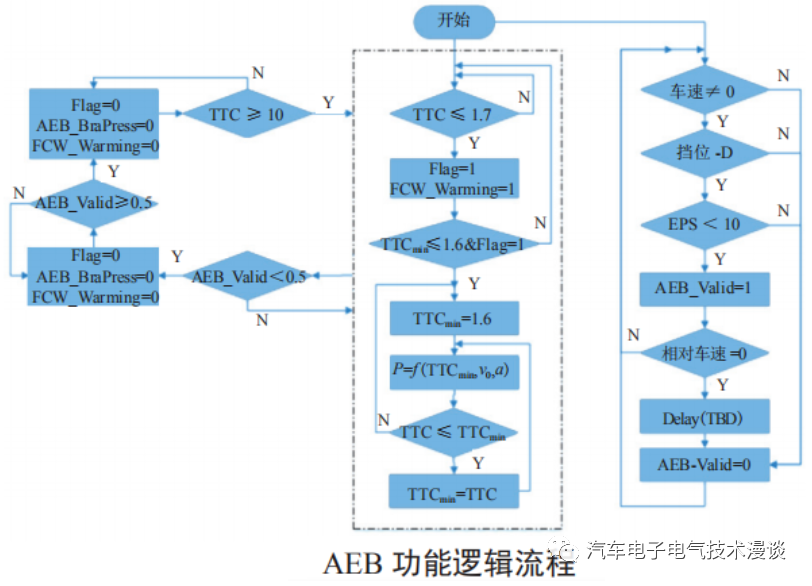
AEB主要功能邏輯如下圖所示,主要包含:
(1)TTC及制動壓力算法;
(2)激活及抑制條件。首先判斷是否滿足AEB激活條件,如:車速>0, 擋位處于 D 擋,EPS方向盤轉(zhuǎn)角是否回位等,如 全部滿足則輸出TTC給AEB系統(tǒng)進行制動壓力的 計算,如不滿足則AEB功能被抑制或退出。設(shè)定TTC觸發(fā)值,如果實際TTC值<觸發(fā)值,則認為AEB/FCW功能被觸發(fā),由線控制動系統(tǒng)執(zhí)行制動壓力計算值,完成緊急制動執(zhí)行動作。
在緊急制動執(zhí)行過程中,如果滿足AEB抑制條件,如:駕駛員主動轉(zhuǎn)向避險、加速踏板明顯被踩踏等,都認為駕駛員主動干預,AEB功能將被抑制。
以 ESC 為執(zhí)行器的AEB系統(tǒng)因其壓力控制精 度較低、響應慢,TTC 觸發(fā)多采用最大制動減速度 保證制動安全,但這會造成制動舒適性及駕駛員安全感降低。
所設(shè)計的以線控制動為執(zhí)行器的AEB系統(tǒng)采用制動安全距離為控制目標,可根據(jù)實際工況實時調(diào)節(jié)制動減速度,可明顯改善制動效果及舒適性。設(shè)TTC觸發(fā)時,兩車相對速度為V0,兩車相對距離為S0,相對安全距離目標為Ssafe,前車減速度為afro(目標信息可由毫米波雷達提供),本車減速度為a,根據(jù)動力學公式:

本車減速度控制目標:
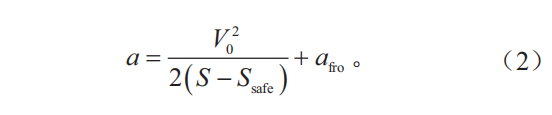
進一步考慮整車模型、道路、制動系統(tǒng)模型等, 得到輪缸制動壓力P與本車制動減速度目標a的解析關(guān)系:

式中:dw為輪缸直徑;BF為制動效能因數(shù);n為單輪輪缸數(shù)量;r 為制動有效半徑。根據(jù)所匹配的實際車型參數(shù),換算關(guān)系為 P a = × 70.628 8 P a = × 70.628 8 。
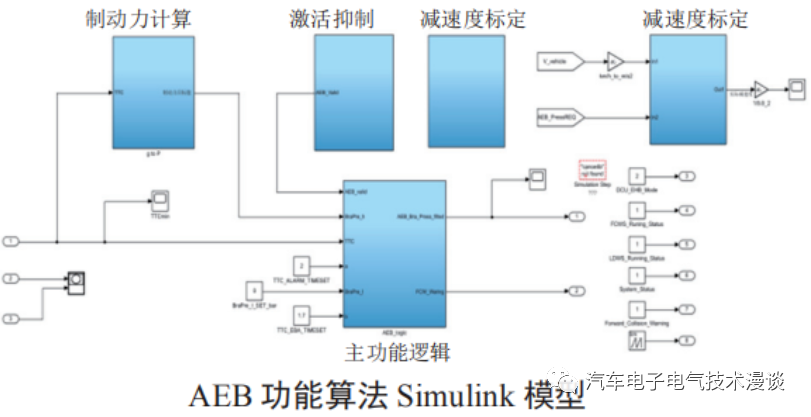
Vector公司的CANoe具有強大的CAN總線設(shè)計及仿真功能,借助CANoe_Simulink軟件接口, 可使Simulink控制模型與整車CAN網(wǎng)絡(luò)實時通訊, 搭建快速控制原型,驗證算法的實時性和可靠性, 聯(lián)合模型如下圖所示。
3.2 AEB 系統(tǒng)功能測試?
在封閉場地對 AEB 樣車進行功能測試驗證, 試驗設(shè)備構(gòu)成如下圖所示。

在10~40 km/h本車車速范圍內(nèi),對前靜止目標進行AEB功能隨機測試, 相關(guān)試驗數(shù)據(jù)通過數(shù)據(jù)記錄儀進行記錄和分析。?
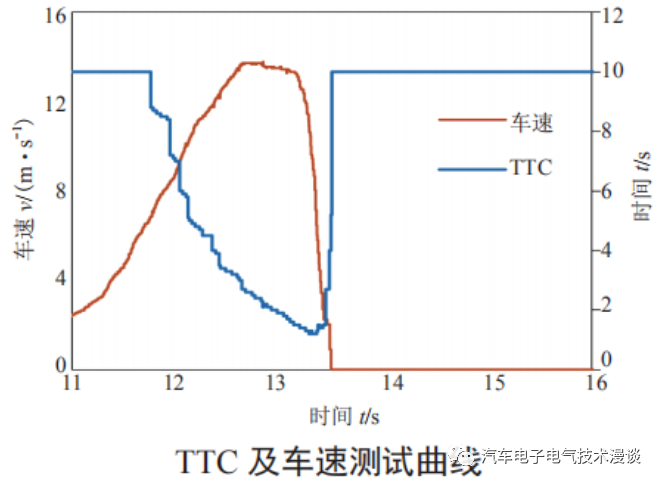
如下圖所示,AEB功能執(zhí)行過程中,為控制制動距離,由TTC直接計算得到的制動力計算值可能會產(chǎn)生波動或減小,通過AEB功能算法保證制 動力不減,并根據(jù)危險程度降低做實時制動力值更新,AEB 制動結(jié)束時刻之后,適當延時制動力輸出, 維持制動效果。
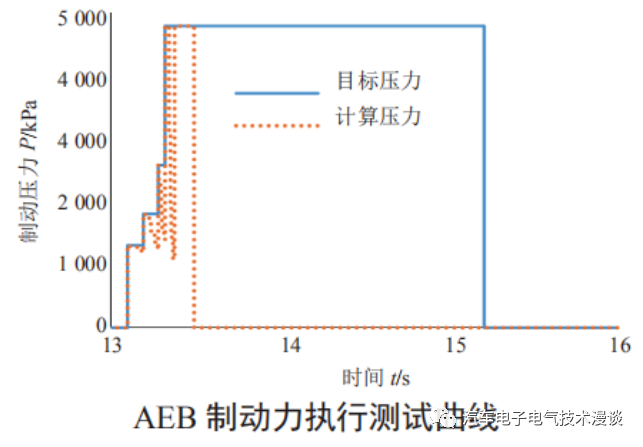
如下圖所示,試驗結(jié)果基本體現(xiàn)AEB預期功能策略。制動力目標值與TTC值有函數(shù)關(guān)系, TTC檢測精度對制動力目標有較大影響,這會影響實際制動精度及制動舒適性,從根源上應優(yōu)化毫米波雷達的濾波算法,并且在AEB策略輸入端也做好TTC真值的校驗。?
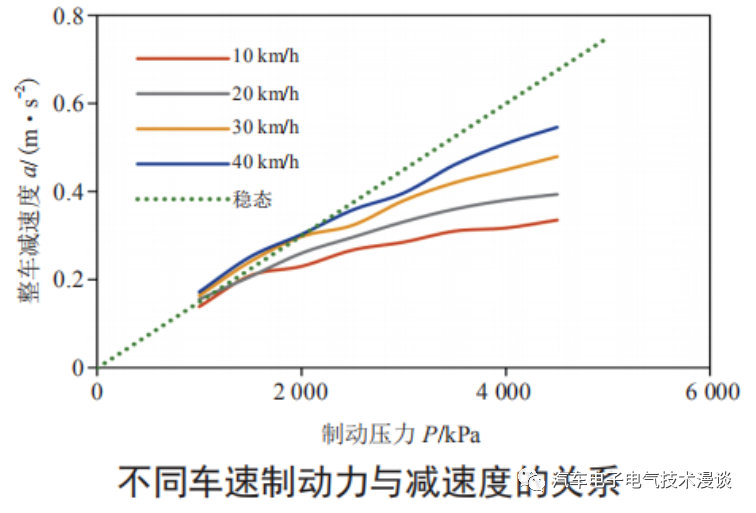
前文中式(3)計算了制動力和整車制動減速度的關(guān)系,但實際測試中發(fā)現(xiàn):僅穩(wěn)態(tài)滿足式(3)的結(jié)果,實際上由于線控制動系統(tǒng)響應時間、風阻、 載荷等因素的影響,呈現(xiàn)下圖所示的制動力與減速度對應關(guān)系,這對AEB制動效果的影響至關(guān)重要, 需要據(jù)此進行標定。
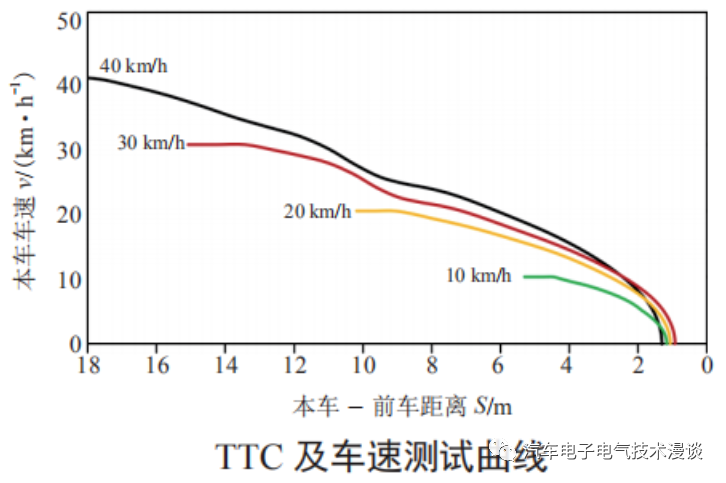
對本車車速10~ 40km/h范圍內(nèi)的AEB功能觸發(fā)效果進行了測試統(tǒng)計,系統(tǒng)能根據(jù)不同本車車速實時調(diào)整制動力值,實測制動距離誤差在 ±0.5 m 內(nèi),制動距離穩(wěn)定,達到設(shè)計目標,如下圖所示。
4 結(jié)論 ?
所選用的毫米波雷達具備較好的目標距離識別精度,可有效地輸出AEB系統(tǒng)所需的危險目標信息。設(shè)計了AEB核心算法中的抑制/激活條件、 TTC 觸發(fā)邏輯、制動力-減速度計算、載荷估計等模塊,通過快速控制原型進行實車驗證,基本達到開發(fā)目標,為后續(xù)量產(chǎn)開發(fā)打下了良好的基礎(chǔ)。
六 分類
廣義上,AEB不僅包含緊急制動功能,還包含前向碰撞預警(Front Collision Warning)以及緊急制動輔助(Emergency Braking Assist或者Dynamic Brake Support)。目前,市場上的AEB功能無論從名稱還是技術(shù)實現(xiàn)形式上都分許多類型,簡單梳理如下:
1.功能名稱劃分
各大主機廠與零部件一級供應商對AEB的命名各有不同。如博世的預測性緊急制動系統(tǒng)(Predictive Emergency Braking System)就包含了FCW、EBA以及AEB 3個子功能,分別對應駕駛員注意力不集中、駕駛員制動力不足以及駕駛員無制動反應等3種不同工況。戴姆勒的Attention Assist、沃爾沃與吉利的City Safety,雖然名稱相異,但也包含上述3個子功能。
(1)沃爾沃汽車在全系車型標配的City Safety城市安全系統(tǒng),就包含了AEB及對行人的監(jiān)測功能。當車輛的速度達到30km/h時,前風擋上的光學雷達系統(tǒng)能監(jiān)視交通狀況,當前車剎車、停止或者有其它障礙物的時候,系統(tǒng)首先會自動在剎車系統(tǒng)上加力,以幫助駕駛員在做出動作前縮短剎車距離;如果距離障礙物已經(jīng)很近,系統(tǒng)會緊急剎車。而且,系統(tǒng)采用雷達測出與前車或者障礙物的距離,利用數(shù)據(jù)分析模塊將測出的距離與警報距離、安全距離進行比較,小于警報距離時就進行警報提示,小于安全距離時即使在駕駛員沒有來得及踩制動踏板的情況下,系統(tǒng)會啟動提供輔助制動,剎停車輛。對于剎車和系統(tǒng)反應的靈敏度,有三擋可供車主調(diào)節(jié)。
(2)奧迪將類似的安全輔助系統(tǒng)稱為預防式整體安全系統(tǒng)(Pre Sense系統(tǒng)),分為Pre Sense basic、前部Pre Sense、后部Pre Sense和Pre Sense Plus四個版本,可根據(jù)需要進行選裝。前部Pre Sense主要監(jiān)視車輛前方發(fā)生潛在碰撞事故的可能性。當駕駛員開始制動時,制動輔助系統(tǒng)根據(jù)與前車的距離提供最精確的制動力,采用3階制動時最大可以提供3m/s2的制動加速度。在碰撞事故不可避免時,Pre Sense系統(tǒng)可將碰撞車速降到40km/h以下,從而將事故造成的傷害降到最小。而且,如新奧迪 A6L 配備了進一步升級的夜視輔助系統(tǒng),升級配備了夜間識別行人和野生動物的功能, 探測距離提高到15-130米,行人或移動物體的熱信號經(jīng)過處理后會以黃色標識顯示。當行人橫穿車輛行駛方向時,系統(tǒng)會迅速做出判斷并以紅色突出顯示,同時發(fā)出聲音警告。系統(tǒng)還可通過制動準備以及制動輔助來縮短制動距離,讓駕駛員在夜間駕駛提供更多安全保障。
(3)寶馬自增強型駕駛輔助上線后,就有了較強的預碰撞安全輔助系統(tǒng),如駕駛輔助系統(tǒng)的城市制動功能的碰撞警告系統(tǒng)包括有:帶城市制動功能的碰撞警告系統(tǒng)、帶制動功能的碰撞警告系統(tǒng)和帶城市制動功能的行人警告系統(tǒng)等。其中帶城市制動功能的行人警告系統(tǒng),在大約10km/h至最高60km/h車速范圍內(nèi),通過攝像頭監(jiān)測前方行人,系統(tǒng)根據(jù)緊急情況不同發(fā)出可能與行人碰撞的警告,當發(fā)出嚴重警告時會以大約4m/s的減速度自動剎車使車輛減速,在碰撞發(fā)生前1.2秒提示駕駛者,并提前0.9秒制動,制動干預時間約為1.5秒,當自動剎車作用后最多可將時速降低20公里,但系統(tǒng)僅在白天工作。
2.按識別的交通參與者類型劃分
目前市面上的AEB功能,除了支持避免追尾工況的AEB車對車之外,還有支持識別行人的AEB-Pedestrian,和支持識別兩輪車騎行人的AEB-Cyclist。
3.按支持的行駛速度段劃分
歐盟新車安全評價協(xié)會(Euro-NCAP)為緊急自動剎車(AEB)訂下了評價標準。
在Euro-NCAP 的評價項目里,與主動安全系統(tǒng)相關(guān)的有6項,其中自動緊急剎車系統(tǒng)(AEB)就占了3 項,分別為以下:
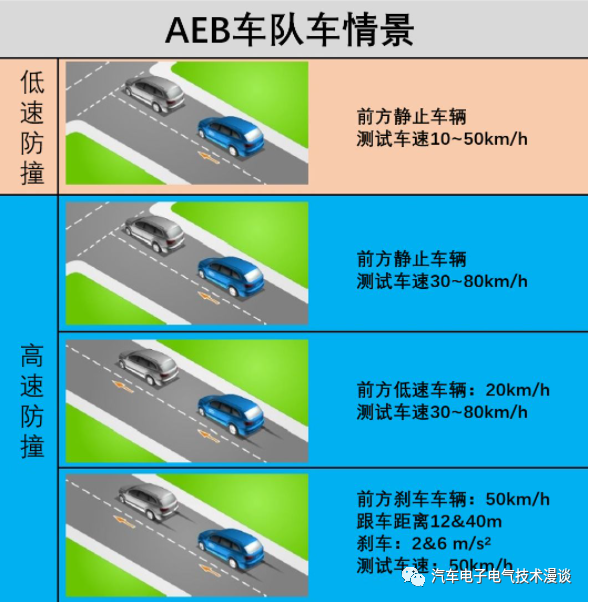
低速防撞系統(tǒng)
高速防撞系統(tǒng)
行人防撞系統(tǒng)
(1)低速防撞系統(tǒng)主要應用于市區(qū)中的情境,檢驗車輛的AEB在低速狀態(tài)下是否能主動偵測前方碰撞風險,并協(xié)助駕駛者進行剎車,或者是直接介入進行緊急剎車。
?
低速防撞系統(tǒng)的應用情境主要在市區(qū)。
(2)高速防撞系統(tǒng)則主要應用于中、高行車速度的郊區(qū)場景,由于駕駛員可能因為分心,而導致嚴重意外事故發(fā)生,AEB必須要在與前車距離更遠的位置,預先發(fā)出提醒,讓駕駛得以減慢車速避免碰撞;如果駕駛員還是沒有主動減慢車速的動作,AEB 同樣可以自動介入,進行緊急剎車。
高速防撞系統(tǒng)的應用場景主要在郊區(qū)。
(3)相對于車輛與車輛間的防撞系統(tǒng),行人防撞系統(tǒng)則是針對突然沖出的行人而設(shè)計。當AEB偵測到車輛與行人間的相對速度和距離,達到系統(tǒng)預設(shè)的警示值時,將提醒駕駛員減慢車速,如果即將發(fā)生碰撞,AEB則會啟動緊急剎車,保障行人安全。
行人自動緊急制動系統(tǒng)能夠避免或減輕與行人發(fā)生碰撞。主要應用場景:行人橫穿馬路。行人預報警功能在探測到有碰撞風險時會通過聲音及圖片提醒駕駛員及時做出反應,降低碰撞風險。該功能工作車速為4-70 公里/小時。
4.按技術(shù)實現(xiàn)形式劃分
目前市面上所搭載AEB技術(shù)方案主要分為以下四種。第一種是僅依靠77GHz毫米波雷達,這是最基礎(chǔ)的一種技術(shù)方案;第二種是僅依靠視覺方案,這種方案大部分只能有效識別行人或者車輛;第三種是視覺(包括單雙目和多目)+毫米波雷達,這種方案在有效識別行人和車輛的同時,也可以識別一些障礙物,但極易觸發(fā)導致頻繁急停;還有一種最復雜的是多傳感器融合方案,包括近距離24GHz毫米波雷達、超聲波雷達以及環(huán)視攝像頭等等。雖然有一些車型搭載的AEB非常先進,但仍然缺乏綜合判斷的能力,所以AEB存在這些問題也是難以避免的。
沃爾沃早期車型上配備的City Safety主要依靠大陸的激光傳感器實現(xiàn),除此之外,大多數(shù)AEB功能的實現(xiàn)形式是以毫米波雷達(以博世、大陸等為主的陣營)、單目視覺攝像頭(以Mobileye等為主的陣營)、雙目視覺攝像頭(以博世、大陸和日立等為主的陣營)以及多傳感器數(shù)據(jù)融合(以博世、大陸、安波福和維寧爾等為主的陣營)來實現(xiàn)的。
5.根據(jù)不同的路況,自動緊急制動系統(tǒng)AEB系統(tǒng)可分為三類:
(1)用于城市路況的AEB系統(tǒng):
對于城市路況來說,一般的交通事故都發(fā)生在交通擁堵時,特別是在路口等待通行時。這時駕駛者可能過于注意交通指示燈,而忽視了與前車的距離;他也可能過于期待前方車輛前行甚至加速,而事實上前方車輛并未前進或者速度過慢。城市駕駛的特點就是低速,但是容易發(fā)生不嚴重的碰撞,這些小事故大約占全部碰撞事故的26%左右。低速AEB系統(tǒng)可以監(jiān)測前方路況與車輛移動情況,一般有效距離為6~8米。
這類AEB系統(tǒng)的核心裝備是激光雷達。一般安裝在前風擋位置。如果探測到潛在的風險,它將采取預制動措施從而車輛將有更迅捷的響應。如果在反應時間內(nèi)未接到駕駛者的指令,該系統(tǒng)將會自動制動或采取其它方式避免事故。而在任何時間點內(nèi),如果駕駛者采取了緊急制動或猛打轉(zhuǎn)向等措施,該系統(tǒng)將中斷。?
歐洲NCAP定義都市型AEB系統(tǒng)能在車速不超過20公里/小時情況下起作用。這個速度段也集中的了都市事故的80%左右。而且這套系統(tǒng)在天氣情況惡劣時效果更好。
(2)用于高速公路路況的AEB系統(tǒng):
在高速公路上發(fā)生的事故,與城市內(nèi)事故相比,呈現(xiàn)明顯的不同特點。城市快速路上的駕駛者可能由于長時間駕駛而分心,而當他意識到危險時可能又由于車速過快而為時已晚。為了能適應這種行駛情況,用于高速公路路況的AEB系統(tǒng)就應運而生了。
這套裝備以遠距離雷達為核心設(shè)備,采用預警信號來提醒駕駛者潛在的危險。如果在反應時間內(nèi),駕駛者沒有任何反應,第二次警示系統(tǒng)將啟動(比如突然的制動或安全帶突然收緊),此時制動器將調(diào)至預制動狀態(tài)。如果駕駛者依然沒有反應,那么該系統(tǒng)將將自動實施猛制動。這套系統(tǒng)還包括安全帶預緊的功能。
這種類型的AEB系統(tǒng),主要在車速介于50~80公里/小時間起作用。這類系統(tǒng)主要針對城市間行駛的情況,在低速情況下可能只是會提醒駕駛者。同樣的,這種雷達系統(tǒng)在惡劣天氣情況下表現(xiàn)效果更好。
(3)用于保護行人的AEB系統(tǒng):
作為行人保護系統(tǒng),這類AEB系統(tǒng)除檢測道路上車輛之外,還能探測行人等障礙物。
這套系統(tǒng)的核心裝備是攝像頭包括紅外裝置等,它可以辨別出行人的圖形和特征。如果探測到潛在的危險,該系統(tǒng)將會警告駕駛者。
相比之下,預測行人行為是比較困難的,從算法角度來說是非常復雜的。這套系統(tǒng)需要更有效的響應,但是如果僅是車邊有行人平行通過就不能應用至制動系統(tǒng)。這套系統(tǒng)也集成了雷達或者叫做探測器,隨著紅外技術(shù)的發(fā)展,這項技術(shù)還將進一步優(yōu)化。
6.根據(jù)不同的輔助方式可分為
自動緊急制動系統(tǒng)是安全系統(tǒng),每個點火周期,功能默認開啟。系統(tǒng)在判斷有危險發(fā)生時將會采取以下方式輔助駕駛員:
(1)預測性碰撞報警
當車速達到 30 公里 / 小時及以上時,系統(tǒng)認為有潛在碰撞風險,將通過報警聲音,儀表界面報警圖片等方式提示駕駛員有潛在碰撞風險。
(2)緊急制動輔助
當車速達到 4 公里 / 小時及以上時,如危險情況發(fā)生,但是駕駛員當前制動力太小,系統(tǒng)會輔助駕駛員增大制動力來避免或減輕碰撞。
(3)自動緊急制動
當危險情況發(fā)生,而駕駛員沒有做出有效反應時,系統(tǒng)會適時介入,進行自動緊急制動,來避免或減輕碰撞。自動緊急制動最多可減少 50 公里 / 小時的速度。
七 作用
1、檢測障礙物距離的功能 ? 通過毫米波或激光探測雷達反饋的信息,系統(tǒng)能及時的檢測自車與障礙物之間的距離。
車距監(jiān)測及預警:系統(tǒng)不間斷地監(jiān)測與前方車輛的距離,并根據(jù)與前方車輛的接近程度提供三種級別的車距監(jiān)測警報。
2、前車碰撞預警功能
(1)前向碰撞預警:系統(tǒng)警示駕駛者與前方車輛即將發(fā)生碰撞。當車輛按當前行駛速度與前方車輛的可能碰撞時間在2.7秒內(nèi)時,系統(tǒng)將產(chǎn)生聲、光警告,車輛圖標將變?yōu)榧t色并發(fā)出警示音,提示駕駛員危險。
前方碰撞預警
近距離報警
前方行人碰撞警告
(2)預碰撞安全系統(tǒng)(PCS,Pre-Crash Safety)
AEB使用的傳感器還可用于啟動安全氣囊、安全帶預緊器和其它被動安全系統(tǒng)相關(guān)的功能,這些系統(tǒng)在碰撞不可避免的情況下可以減輕碰撞傷害甚至挽救乘客的性命。
PCS可以通過與ABS和ESC系統(tǒng)共用相關(guān)的標準配置傳感器的安裝方式來降低成本,而ABS和ESC已經(jīng)在許多地區(qū)是強制要求搭載的功能了。前置攝像頭、激光雷達和雷達需要一些額外的時間來啟動被動安全系統(tǒng),約需100ms。
?
E-NCAP和J-NCAP獲獎車型還需提供行人碰撞保護,例如需要部署能量吸收結(jié)構(gòu)、外部安全氣囊和防止頭部受傷的主動安全防護罩。
3、自動減速功能
4、自動制動功能 當自動緊急制動系統(tǒng)采取報警、減速措施之后,駕駛員仍沒有及時對當前情況作出及時反應時,系統(tǒng)會自動制動,避免發(fā)生碰撞,減免交通事故的發(fā)生。
初級自動緊急制動
自動緊急制動系統(tǒng)正常工作,距離碰撞時間小于1.4s時,系統(tǒng)進入緊急制動階段,控制自車的車速。
5、屏蔽功能 自車加速超車時,開啟轉(zhuǎn)向燈,自動制動功能暫時屏蔽不影響駕駛員正常駕駛。 6、道路防偏離功能
汽車越線預警:在轉(zhuǎn)向燈沒有打開的情況下,車輛穿過各種車道線前約0.5秒系統(tǒng)產(chǎn)生越線警報;
前車道偏移預警? ?
行車過程中,當車輛行速度超過30公里,車道偏離預警系統(tǒng)將啟動并實時掃描前方車道線,在未打轉(zhuǎn)向燈的情況下,如果車輪超出車線,報警器將發(fā)出警示音。
7、預警制動數(shù)據(jù)分析提醒及制動記錄功能
行車記錄儀
每當駕駛?cè)宋kU駕駛,系統(tǒng)預警或制動時,系統(tǒng)會記錄碰撞預警時間、啟動緊急制動時間、終止碰撞預警時間以及終止緊急制動時間。
8、溜車碰撞預警
在城市擁堵行車環(huán)境中,當可能與前車發(fā)生低速碰撞時,自車圖標將變?yōu)榧t色并發(fā)出警示音。
9、前車啟動提醒
前車啟動報警
當結(jié)束排隊等候,前車已駛離時,自車駕駛員因走神未察覺到,報警器會發(fā)出警示音。 10、移動端控制功能 駕駛員可通過手機移動端自行調(diào)節(jié)此系統(tǒng)的制動力度,制動距離等,完美切合駕駛員的駕駛習慣。
11、系統(tǒng)自檢功能 系統(tǒng)會在自車啟動時,完成對所有主要的系統(tǒng)傳感器和組件的自檢,通過信號燈或顯示屏明確表示系統(tǒng)當前的工作狀態(tài)。 12、倒車防碰撞預警功能
車輛掛上倒檔后,當自車與障礙物處于危險距離小于1.5m時,該裝置能通過報警器發(fā)出警示音,提示駕駛員危險。
13、倒車限速功能
車輛在掛上倒檔后,倒車最大速度將控制于10km/h,從而更有效的保護人車安全。
14、倒車主動剎車功能
車輛掛上倒檔后,當自車與障礙物處于危險距離小于1m時,該系統(tǒng)能主動的使車輛自動制動,從而減免倒車事故的發(fā)生。
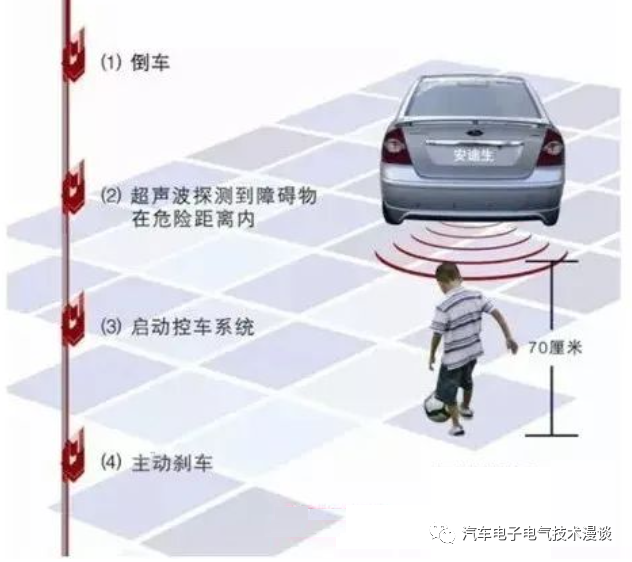
倒車輔助剎車系統(tǒng)AEB
倒車自動緊急制動防撞系統(tǒng)(R-AEBS)由主控制器、副控制器、感應器、執(zhí)行機構(gòu)和顯示器五個部分組成,在車輛掛倒擋時本系統(tǒng)自動啟動,并將車輛后面的情況實時通過測距信號輸出,可通過車載顯示器顯示并伴有聲音提示,當車輛進入到預先設(shè)定的危險距離時,系統(tǒng)會自動緊急制動剎車,以避免倒車過程的碰撞。
1)倒車AEB系統(tǒng)采用超聲波雷達測出與車尾障礙物的距離,然后利用數(shù)據(jù)分析模塊將測出的距離與警報距離、安全距離進行比較,小于警報距離時就進行警報提示,而小于安全距離時即使在駕駛員沒有來得及踩制動踏板的情況下,倒車AEB系統(tǒng)也會啟動,使汽車主動剎車。
2)功能:
①?自檢功能:啟動車輛掛上倒擋后,系統(tǒng)在1秒內(nèi)自動對系統(tǒng)進行自檢,如有故障系統(tǒng)進行語音提示。?
②?實時距離提示:當掛上倒擋后,該系統(tǒng)自動啟動,并播報車尾距障礙物的實時距離(1.5~0.3米),距離檢測誤差在0.05米。
?車輛倒車時有數(shù)字或光柵顯示器予以提示距離
?車輛倒車時系統(tǒng)會發(fā)出“Bi,Bi”聲提示或真人語音報警
③自動剎車:倒車過程,車輛即將碰撞到障礙物前,該系統(tǒng)會自動進行剎車。剎車后車尾距障礙物在25-60公分的距離(標準場地的實驗數(shù)據(jù))
?車輛進入到預先設(shè)定的危險距離時,系統(tǒng)會自動緊急制動剎車
?倒車自動緊急制動防撞系統(tǒng)(R-AEBS)可以實現(xiàn)智能化、人性化制動控制
④自動恢復:該系統(tǒng)剎車后,系統(tǒng)在3秒內(nèi)會釋放剎車并恢復系統(tǒng)至初始狀態(tài)。
?車輛掛倒擋時系統(tǒng)自動啟動,摘除倒擋時系統(tǒng)自動關(guān)閉
⑤自動關(guān)閉:當司機完成倒車過程后(摘掉倒擋),該系統(tǒng)會自動關(guān)閉。
?一鍵緊急關(guān)閉系統(tǒng)
15.后十字路口交通警示(RCTA,Rear Cross Traffic Alert)
RCTA是盲點檢測的擴展功能,其中共用的后向SRR和MRR還可以檢測車輛將要穿過的后方路徑中的其它車輛。若有危險,系統(tǒng)會啟動制動器并切斷加速器防止碰撞。
RCTA是一項非常實用的功能,因為許多司機都是正向開進停車位而不是倒進去的,而RCTA可以算是AEB的擴展,與AEB功能正好是反向的。
從2012年開始RCTA增加了自動制動功能,而且搭載的車型正在增加,主要還是集中于成熟市場中的高端車型。目前,大約有200個車型中的三分之一提供RCTA搭配自動制動功能。OEM們也都在尋求更強大的功能,例如能夠涉及更遠的距離以及能夠追蹤更多目標的功能。
16.其他功能:黑匣子功能、智能導航、休閑娛樂、雷達預警系統(tǒng)(可選)、胎壓監(jiān)測(可選)、數(shù)字電視(可選)、倒車后視(可選)。
八 測試標準和法規(guī)
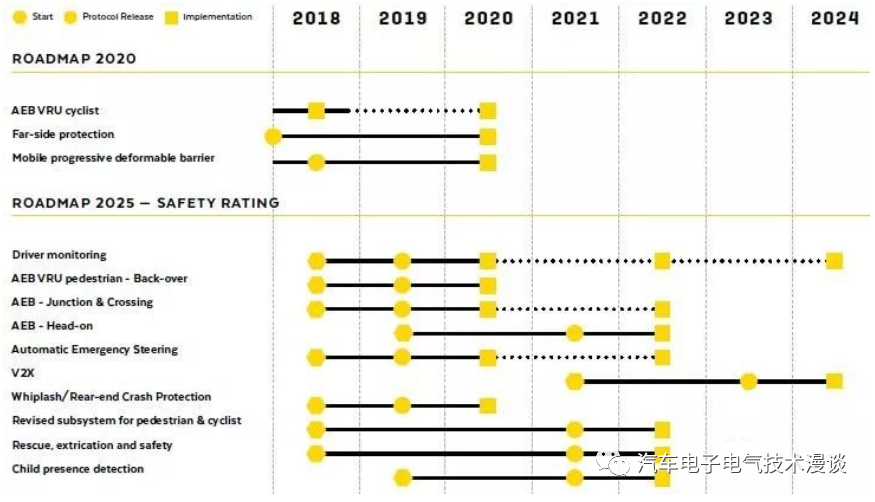
安全評價標準正在不斷提出新的要求,以便提高AEB性能并可以在更多駕駛情況下適用。新要求里面包括,比如測試AEB時行駛速度提高(AEB Interurban)、防止和減輕與弱勢道路使用者(VRU)的碰撞(AEB Pedestrian和AEB Cyclist)以及交叉路口場景(AEB Crossing,AEB Junction, AEB Head-On)。
自動緊急剎車雖然可以大幅提升行車安全性,Euro-NCAP嚴苛的評價標準也為AEB 的性能品質(zhì)提供了保障,但并不是車輛配備了AEB就能夠完全避免車禍發(fā)生,況且Euro-NCAP對于AEB的性能優(yōu)劣是透過是否有碰撞產(chǎn)生與碰撞前減速量來評分,即便車輛的AEB評價較高,也不代表完全沒有碰撞風險。
Euro-NCAP AEB 評價的詳細規(guī)范
各家車廠對于AEB的調(diào)校與設(shè)定都不相同,消費者實際操駕時,應該把AEB視為備而不用的功能,不要刻意去測試緊急自動剎車系統(tǒng)的能耐;至于剎車的方式和系統(tǒng)介入的時機,由于Euro-NCAP沒有對此訂出評價標準,所以AEB作動時能否讓乘客感到舒適,就得考驗車廠系統(tǒng)設(shè)計的功力。
為了對AEB系統(tǒng)的性能進行系統(tǒng)的測試及評價,歐美等國家和地區(qū)相繼頒布了針對AEB系統(tǒng)的測試章程或標準。歐、 美、 日等汽車工業(yè)發(fā)達國家或地區(qū)已分別在研究本國或本地區(qū)道路交通情況的基礎(chǔ)上建立了測試評價方法,制定了相關(guān)的標準或法規(guī),或?qū)EB納入其本國的新車評價規(guī)程(?NCAP) ,以推動AEB的廣泛應用和普及。因AEB對汽車安全性的重要影響,?AEB產(chǎn)品的應用日趨普及, 亟須相關(guān)標準出臺進行引導和規(guī)范。在大力推進發(fā)展智能網(wǎng)聯(lián)汽車的背景下, 中國汽車及相關(guān)行業(yè)也已在車輛的智能化和網(wǎng)聯(lián)化領(lǐng)域加大投入力度,AEB等先進駕駛輔助系統(tǒng)(ADAS) 技術(shù)已開始大范圍研發(fā)并陸續(xù)投入量產(chǎn),產(chǎn)業(yè)化推進處于加速階段。
1.Euro NCAP 規(guī)程
(1)概述?
歐洲新車評價規(guī)程(Euro NCAP)在2014年將AEB納入新車主動安全的評價規(guī)程,首次將針對城市內(nèi)低速工況的城市內(nèi)駕駛環(huán)境AEB-City以及高速城市間道路工況的城市間駕駛環(huán)境AEB-Interurban進行了區(qū)分,并針對不同工況設(shè)置了不同的測試項,但兩類試驗用于測試評價的基本測試場景相同。Euro-NCAP 所評價的三種防撞系統(tǒng)為了應對不斷發(fā)展的汽車安全科技,各國都開始制訂有關(guān)標準及檢驗法規(guī);而目前各國的新車評價系統(tǒng)中,以歐洲的Euro-NCAP所涵蓋的范圍最為廣泛,一共有4大領(lǐng)域共17個項目。
自動緊急制動系統(tǒng)的測試是有一套嚴苛的測試流程和測試標準的,博世內(nèi)部的測試規(guī)程是完全按照目前各國相應的檢測機構(gòu)的規(guī)定來進行的,比如說有歐洲新車評價規(guī)程(E-NCAP),也有中國新車評價規(guī)程C-NCAP)。
(2)定義?
自動緊急制動系統(tǒng)(AEB):車輛在探測到極有可能發(fā)生碰撞時所自動施加的制動, 用以降低車輛的速度并盡可能地避免碰撞。
(3)試驗場景及方法?
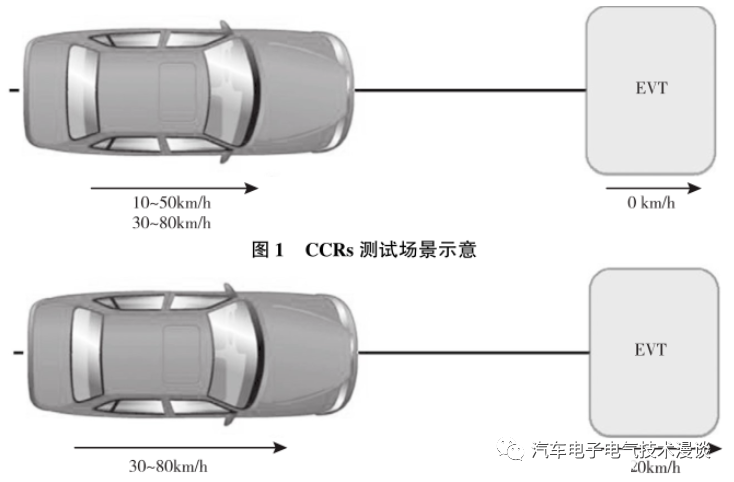
Euro NCAP?將AEB-City和AEB-Interurban的測試場景分為三大類, 1)即車追尾靜止車(Car-to-Car Rear Stationary,CCRs)。?CCRs的場景如圖1所示, Euro NCAP目標車輛( Euro NCAP Vehicle?Target,EVT) 靜止, 驗車輛( Vehicle Under?Test,VUT) 以10~50km/h(AEB-City)或30~80km/h(AEB-Interurban)的速度勻速靠近EVT。低速防撞部分,裝備AEB 的測試車會分別在10~50 公里/小時范圍的各個速度,接近前方的靜止車輛(CCRs),模擬類似于市區(qū)中等紅燈的情境,借此檢測AEB 是否成功啟動,有沒有主動發(fā)出碰撞警告或自動煞停車輛。高速防撞部分,AEB測試車除了用30~80公里/小時的中高速,進行多次測試接近前方靜止車輛外。 2)車追尾運動車 ( Car-to-Car?Rear Moving,CCRm) 。CCRm的場景, 如圖2所示, EVT以20km/h的速度勻速前進,VUT以30~80km/h的速度勻速靠近EVT。AEB測試車用30~80公里/小時的中高速追加前方低速車(20公里/小時,CCRm)。 3)車追尾制動車(Car-to-Car?Rear Breaking,CCRb)。CCRb的場景如圖3所示, 兩車以相同的速度50km/h行駛, 相距12m和40m時EVT以 - 2m/s2和 -6m/s2的加速度制動。其中, 在CCRs 和CCRm中,VUT的速度以10km/h的增量直行, 如果發(fā)生碰撞, 則VUT的速度以5km/h的增量執(zhí)行。前方減速車(從時速50公里緊急剎車,CCRb)的測試,借此讓評價標準更貼近郊區(qū)的行車情境。
當車廠開發(fā)出一套可用的AEB系統(tǒng)后,緊接著就是要面對 Euro-NCAP的嚴格評價標準。
AEB 的運作邏輯
Euro-NCAP主要透過車輛的速度來驗證AEB的作動情境,在車與車之間的防撞部分,主要分成 CCRs、CCRm 與 CCRb 三種,
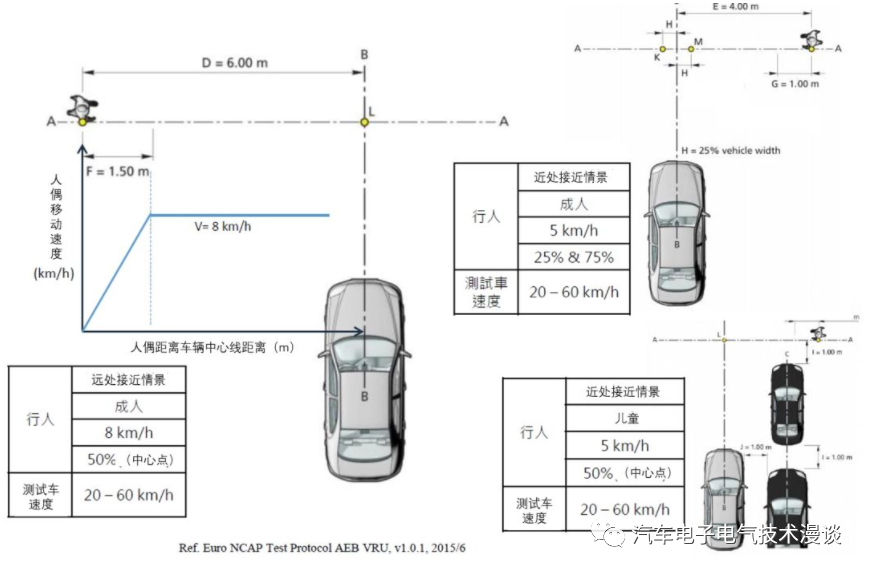
E-NCAP對AEB Pedestrian的測試是在接近垂直交叉口,有時假兒童會隱藏在靜止車輛后面,或者假人與主車輛并排行走。
遠處接近設(shè)定成人走路時速為8公里,AEB 車輛則以20~60 公里/小時的速度接近,并將撞擊點設(shè)定在前保桿的正中央,借此檢測在車輛即將碰撞時,AEB 是否成功啟動。
近處接近則追加兒童進行測試,并將行人速度放慢到5公里/小時,車輛速度不變,成人撞擊點為前保桿偏置25% 及75%,兒童為前保桿正中心,模擬行人突然沖出的情況,檢驗車輛中的AEB 系統(tǒng)是否可靠。
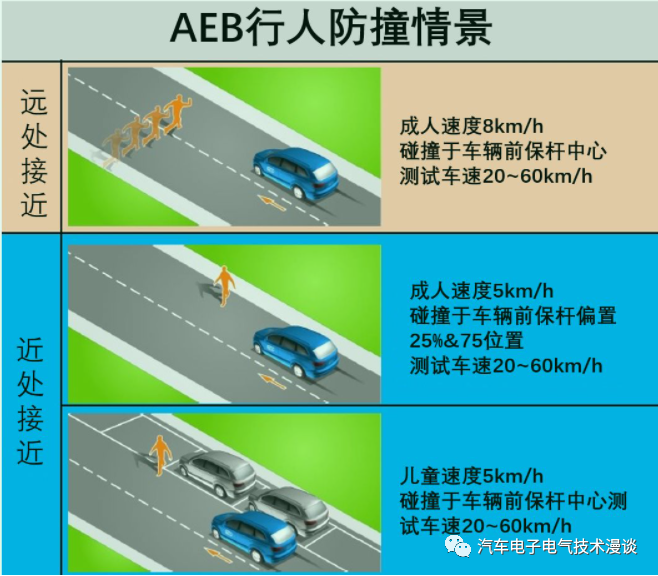
Euro-NCAP 評價 AEB 系統(tǒng)時的車對人情境設(shè)定
Euro-NCAP評價對于AEB的檢測是循序漸進的;如果車輛在時速40 公里的情境下,AEB就已經(jīng)無法發(fā)揮作用,或者降低車輛速度的效果沒有達到要求,后續(xù)50、60、70、80公里的測試,就不會再繼續(xù)下去。
由于Euro-NCAP對于AEB測試所要求的精準度極為嚴苛,不只測試車與目標車的車速偏差必須小于1公里/小時,直線路徑偏差更必須小于10公分,跟車距離偏差也不能大于50公分。
自動駕駛機器人可以精準操作方向盤,完成人類駕駛難以達成的精準操作
首先為了讓車輛的操駕擁有超高精準度,滿足 Euro-NCAP評價標準的要求, 導入自動駕駛機器人,分別配置于AEB測試車與目標車上。不過跟大眾想像中有些不同的是,自動駕駛機器人其實是通過安裝在駕駛座上的轉(zhuǎn)向、加速、煞車和DGPS四個部件所組成。
裝載于測試車上的 DGPS 可以讓機器人精準掌握路徑,完成一模一樣的行車過程
通過自動控制演算法,機器人可以依據(jù)程序設(shè)定,自動操控踏板進行加減速,并按照規(guī)劃好的路線直行、轉(zhuǎn)向,而且每一次的動作幾乎都沒有誤差,借此符合Euro-NCAP測試場景的嚴格要求。
為了示范自動駕駛機器人的精準度,特地在車前裝置了桿子,并在場地上設(shè)計銅鑼,只要車輛準確沿著預設(shè)路線行動,銅鑼就會被敲響。
在行人防撞方面,除了需要讓AEB測試車輛裝載自動駕駛機器人外,另外還需要一套「行人人偶控制設(shè)備」,模擬馬路旁突然沖出的成人或兒童。
測試行人情境的AEB系統(tǒng)時,車載儀器會與控制設(shè)備聯(lián)系,精準計算輛撞擊點,接著拉動平板上的交通錐或人偶,驗證AEB是否有發(fā)揮功能。
整套符合Euro-NCAP評鑒標準的AEB測試設(shè)備,光是硬件部分就投入超過4000 萬,軟件和人員訓練也花費了上百萬,如果車廠進行車輛送檢,最快兩周的時間可以獲得完整的測試報告。
行人防撞測試使用的假人,由于用泡棉所制成,所以風太大時無法使用
為了滿足AEB行人系統(tǒng)的測試要求,一些機構(gòu)已開發(fā)了多款AEB行人檢測裝置。如英國的ABD(Anthony Best Dynamics)公司和奧地利的4active System公司等相繼推出了AEB行人檢測系統(tǒng),并已在諸多汽車制造商及汽車檢測機構(gòu)等得以應用。ABD公司開發(fā)的AEB行人檢測裝置采用了盤式電機驅(qū)動,該電機亦可作為轉(zhuǎn)向機器人的驅(qū)動電機;然而,其軟體假人目標仍是由4active System公司提供。
2.US NCAP 規(guī)程
NHTSA的2010年交通安全事實報告中顯示大約共有9.6百萬起事故。其中,交通岔路口發(fā)生了約450萬起(46.7%),非岔路口事故約為380萬起(40.2%)。2016年3月,大多數(shù)美國OEM承諾到2022年在所有車輛中安裝AEB。
對于AEB, 美國國家公路交通安全管理局(NHTSA)較為普遍的稱呼為CIB( Crash Imminent?Braking),其發(fā)布的文件Crash?Imminent Brake System Performance?Evaluation?For?The?New?Car?Assesment Programm, 對CIB系統(tǒng)評價做了詳細說明。
美國公路安全保險協(xié)會(IIHS)宣布將在其新車安全評估名冊中增加對車輛自動剎車系統(tǒng)的測試。內(nèi)容包括一系列碰撞測試、以及頭部保護裝置和前燈有效性評級。
IIHS的測試分為三項,每項進行兩次,兩次中測試車輛的速度分別為19.3公里/小時和40.2公里/小時。
第一項測試內(nèi)容是,當被測試車輛接近時,一成年人身高的模擬行人從右側(cè)進入道路,到位于道路右側(cè)與車輛正前方之間的中心位置。
第二項測試內(nèi)容是,一兒童身高的模擬行人從路側(cè)兩輛停放的汽車中間進入道路,停在車輛的正前方。
第三項測試內(nèi)容是,一成年人身高的模擬行人位于行駛的被測試車輛正前方與車道右側(cè)之間的中心位置。該項測試要求在日光下進行,且路面必須是干燥的,根據(jù)車輛避免和減輕碰撞的能力,IIHS將區(qū)分并評定,級別分為“基本、良好、卓越”。
3.C-NCAP
2018年7月1日實施的《中國新車評價規(guī)程(China New Car Assessment Program, C-NCAP)管理規(guī)則(2018年版)》引入了AEB車對車及AEB車對行人兩項評價,并在相應的測試場景、速度及權(quán)重上,基于中國道路事故深入研究數(shù)據(jù)庫(CIDAS)中的中國道路上發(fā)生的車與車追尾以及車與行人碰撞的事故場景,進行了相應的優(yōu)化及調(diào)整,以更契合中國特殊的道路情況;也系統(tǒng)的提出了對AEB行人系統(tǒng)的測試方案與評價標準。這些測試規(guī)程、標準的出臺,對于規(guī)范AEB行人系統(tǒng)的設(shè)計,提高行車安全性具有重要的推動作用。為了普及AEB功能的裝配率,當測試車型未將AEB作為標準配置時,C-NCAP會對裝配率進行考核——裝配率必須達到25%才能得到所有AEB測試的分數(shù)。而對于全系標配AEB的車型,C-NCAP也給予了系統(tǒng)加乘1.2的鼓勵。
編輯:黃飛
















 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論