世界上第一臺真正意義上的移動機器人是斯坦福研究院(SRI)的人工智能中心于1966年到1972年研制的,名叫Shakey,它裝備了電視攝像機、三角測距儀、碰撞傳感器、驅動電機以及編碼器,并通過無線通訊系統由二臺計算機控制,可以進行簡單的自主導航。
2016-05-25 09:57:53 2099
2099 和高度)。當GNS信號下降時,僅基于INS的位置估計就會漂移。因此,為了準確地自主導航航向,必須確保同時接收至少四顆衛星的無線電信號。當無人機任務包括GNSS信號變得不可靠的中間位置時,例如城市
2022-11-18 11:44:45687 局限全場景自主移動機器人在各領域開疆拓土的根本問題。 如今, 松靈機器人宣布推出NAVIS 3D激光自主導航平臺 ,以一種更簡單、更快捷以及更穩定的方式,助力移動機器人走向更遠的未來。 ? ▍全場景自主導航讓移動更輕松 從室內
2023-06-01 11:45:101137 
什么意思?問題2:聲音數據處理時,想將聲音數據從時域變成頻域,那么labview程序面板里面的 信號處理中的FFT功率譜和PSD VI和聲音與振動工具包里面的頻率分析VI有啥區別?是否都能完成聲音數據的頻譜分析任務?
2016-05-14 21:45:49
作者:LauroRizzattiVSORA是一家法國巴黎的DSP設計工具公司,推出了一種高效5G寬帶新型設計架構,迅速從5G和AI的芯片開發中脫穎而出。近日,創始人兼首席執行官
2019-06-18 06:37:30
自主導航小車AGV定位方法的研究[1]
2016-08-29 11:07:35
和即時定位問題,而自主導航需要解決的是智能移動機器人與環境進行自主交互,尤其是點到點自主移動的問題,這需要更多的技術支持。 要想解決機器人智能移動這個問題,除了要有SLAM技術之外,還需要加入路徑規劃
2018-08-24 16:56:24
我想知道 X-CUBE-AI 和 NanoEdge AI Studio 在 ML 和 AI 開發環境中的區別。我可以在任何一個開發環境中做同樣的事情嗎?使用的設備有什么限制嗎?
2022-12-05 06:03:15
切諾基原裝harman主機,故障描述:藍牙連接手機正常,媒體音頻和手機音頻正常打開,音量調到最大,車機音頻音量和導航音量也均調到最大(證明所有連接及設置正確)。1、通過手機播放音樂車內喇叭正常有聲音
2020-05-29 22:53:37
文章先介紹一下推流直播的原理和開發環境的準備,話不多說,直接開整。使用到的工具介紹:1.FFmpeg,2.嗶哩嗶哩直播姬1.FFmpeg是一套可以用來記錄、轉換數字音頻、視頻,并能將其轉化為流的開源
2020-12-31 01:27:22
飛行器,還有智能潛艇。非常試試這塊性能強大的hikey開發板,看看處理器之間的差距有多大。項目描述:基于激光雷達對房間進行掃描建模,重構地圖,并且進行路徑規劃與重構,自主導航。同時用戶可以 利用WIFI
2016-04-05 12:17:40
【LicheeRV-Nano開發套件試用連載體驗】+ 實現三麥克納姆輪小車自主導航
非常感謝被選中成為Sipeed矽速科技、電子發燒友論壇組織的此次試用體驗幸運兒,有機會參與
2024-03-03 14:20:58
課題的研究背景和國內外的相關研究現狀,同時介紹課題的來源和研究意義。2.簡單介紹模型驅動開發理論及UML建模語言,闡述基于UML的嵌入式軟件開發環境Rhapsody這個工具的層次結構;針對
2015-07-15 16:02:45
`` 本帖最后由 colgame 于 2019-8-21 22:16 編輯
上一篇《使用cartographer構建地圖 》主要說明了Toybrick使用開源的slam算法
2019-08-21 22:12:16
發展。在前兩篇文章中,我們介紹了移動機器人的基本概念和硬件組成。本文繼續深入探討移動機器人的自主導航系統及上位機軟件****設計與實現。
01移動機器人的內載算法
為了實現移動機器人在未知環境的自主導航
2023-06-28 09:36:32
根據結構化道路環境的特點提出了一種將邊沿檢測和道路環境知識相結合的機器視覺算法 , 并結合基于行為響應的路徑規劃方法和智能預瞄控制方法 , 實現了一套基本的機器人視覺導航系統 . 在自主機器人實驗
2023-09-25 07:23:39
紛紛探索集成 AI 技術;在資本市場,AI 技術的投資與投資收益都呈現上升趨勢;全球范圍內的 AI 交流活動在明顯增加……
聚焦至 AI 技術本身,我們可以看到,當下新興的 AI 工具幾乎全部以開源
2023-05-09 09:49:41
的圖像信息和機器人的實際位置聯系起來,完成機器人的自主導航定位功能。但該技術圖像處理量巨大,一般計算機無法完成運算,實時性比較差,且容易受光線條件限制,無法在黑暗環境中進行工作。 3.紅外線定位導航紅外線
2018-10-11 17:49:40
一、聚焦目標1. 本課目標:逆推法完成電源部分。因為第一次使用逆推法學習開源硬件電路,這節課目標還是集中在最前面的繪制電路圖。主要學習逆推學習法的基本步驟、框架,理解其內涵,并逆推學習電路圖的一部分
2021-12-30 08:15:39
放置到虛擬環境中,使用gmapping 和 hector_slam功能包實現SLAM仿真。在第一題建立完成的地圖上,實現基于move_base和amcl功能包的機器人自主導航仿真。源碼可在git...
2021-12-17 07:06:59
本帖最后由 xiaogengniu 于 2013-5-4 12:38 編輯
基于聲音與振動工具包的振動測量分析
2013-05-04 12:37:36
本帖最后由 luna 于 2011-3-3 11:58 編輯
詳細闡述了基于單片機的聲音導航定位系統的設計過程,并給出了主要電路圖。該系統是以智能小車為運動體的聲音定位測控系統,控制器由主從
2011-03-02 16:28:22
。 了解如何使用開源標準(例如DITA和PHP)以及工具(例如blob表示形式)來創建系統級環境來滿足這些需求。此內容不再被...
2021-11-05 07:34:18
本文描述了如何使用LabVIEW以及聲音與振動工具包對音頻數據進行采集、分析與顯示。我們將會演示最常見的測量以及在音頻測量過程中完成多個任務的LabVIEW代碼。
2021-06-03 06:56:02
為了將簽名與多維數據集程序員分離,我使用 openssl 制作了一個開源 C 簽名工具。在各種構建環境中應該相當容易使用。
2022-12-06 07:52:00
如何實現瘋殼AI開源無人機遙控整機代碼走讀/編譯與燒寫?
2021-12-20 06:28:42
facebook輪播視頻In yet another bid to get your attention while browsing Facebook on your mobile device
2022-01-21 12:24:46
開源自主導航小車MickX41 小車底盤1.1 底盤機械組裝1.2 底盤硬件框圖2 電氣系統搭建本系列教程意在分享自己學習ROS自主導航小車時候的筆記,教程內容包含了從零開始搭建一個四輪的小車
2021-08-06 07:08:33
承接 Driver SIG 的音視頻硬編解碼 HDF 框架實現的任務。隨著開源經驗的積累,團隊也匯聚了各領域的技術專家。因此,深開鴻在 2021 年 9 月份正式主導了第一個 SIG 組——AI 框架
2022-05-10 10:48:17
,大家的腦子里會立刻浮現“導航犬“或者”拐杖“這樣的“交通工具”。但“導航犬”過于昂貴,“拐杖”又過于簡單。最近,斯坦福大學的學生團隊結合AI技術,研發出來一款幫助盲人走路的智能拐杖,掀起了拐杖大變革
2021-11-12 14:12:43
看很多人都說在手機上就能分析數據,還是從自己的立場出發去調整報表,針對性分析自己關心的數據。這是怎么做到的?用什么數據分析工具實現的?用數據可視化工具制作的報表就可以在手機端自主分析。也就是上段提到
2021-04-13 10:00:57
,導航指示信號類型,導航地域等因素的不同,可以分為基于地圖導航,基于視覺導航,基于傳感器導航、GPS衛星導航等。無論采用哪種導航方法,智能輪椅都應具有路徑規劃與避障,探測與定位等功能。輪椅自主導航主要由環境感知自定位運動路徑規劃和目標確定等幾個功能模塊組成。
2023-09-25 07:13:35
完全等同于自主定位導航。那么,在實際應用時,SLAM究竟是如何實現的?在實現過程中又有哪些難點?下面將為大家一一解答。當我們身處異常,導航軟件和戶外地圖成為我們找路最有利的工具,服務機器人和人類一樣也
2018-10-10 16:29:21
```` 移動機器人想要在完全陌生的環境中(沒有預先錄入地圖的情況下)實現智能導航,顯然不是那么簡單。所以,移動機器人實現智能化的第一步,當然是像人一樣擁有“眼睛”和“小腦”,擁有自主定位、導航、避
2018-01-03 11:41:55
http://www.uicctech.com/ 磁導航傳感器主要運用于自主導航機器人、室內室外巡檢機器人、自主導航運輸車AGV(AGC)、自動手推車等自主導航設備,完成自主導航設備的預設運行
2016-03-30 11:29:32
LNM-v1.0(工業級)無軌導航無軌導航LNM-v1.0激光導航模塊是一款基于室內復雜壞境的導航模塊,該模塊通過激光雷達對室內環境進行掃描,自主構建地圖并自主規劃路徑行走。LNM模塊只要配合
2017-06-10 14:07:17
瘋殼AI開源無人機開機測試及硬件資源匯總,絕對實用
2021-12-20 06:37:11
市場的競爭力。而這款產品,已經得到Facebook高管的認可。新節能芯片獲Facebook高管肯定英特爾在當地時間本周二推出的這款Atom芯片,采用了低能耗技術,相比傳統的英特爾服務器芯片,耗電量更少
2012-12-12 10:09:45
各位大神好,剛剛進入論壇,現在想要在無人機上實現采集圖片,分析圖片信息和物體以及自身的坐標,完成自主導航的功能,聽人說樹莓派有開源程序,找了半天沒有找到,對了我的無人機是基于pixhawk的板子
2016-12-22 18:11:15
各位大神好,剛剛進入論壇,現在想要在無人機上邊加一個樹莓派,來用于采集圖片,分析圖片信息和物體以及自身的坐標,完成自主導航的功能,聽人說樹莓派有開源程序,找了半天沒有找到,所以過來找各位要一下,對了我的無人機是基于pixhawk的板子的,或者各位有什么建議也可以提出來,謝謝各位。
2016-12-22 18:08:10
利用星敏感器和地平儀測量“星光仰角”,進行自主導航方案設計。將UPF(UnscentedParticle Filter)方法引入導航方案,利用UKF(Unscented Kalman Filter)獲得重要性采樣函數的同時,
2009-06-03 09:12:56 22
22 針對智能機器人車的導航、控制問題,本文設計搭建了一套基于AT89S52 的機器人車自主導航控制系統。該系統采用聯合CCD 和超聲波測距的兩級融合方法對目標的運動姿態、狀態信
2009-08-28 10:35:5325 汽車導航系統背景原理分析
從應用的角度,汽車GPS導航可分為兩種方式。第一種方式是汽車擁有獨立的GPS導航裝置,可以進行自主導航。例
2010-03-17 13:44:192053 為了加強智能車輛在全未知環境下的自主導航行駛能力,設計了使用步進電動機驅動小波束角超聲傳感器旋轉探測的方法,獲取了較以往相比更加全面準確地環境信息。在此基礎上,針
2011-06-08 15:21:1051 在交通部要求3月份前完成全國9個示范省市大型車輛強制安裝北斗導航后,我國自主研發北斗導航技術進入一個新的舞臺。根據相關消息稱,再過不久北斗導航就要進入智能手機領域。
2013-04-08 10:12:392153 基于模糊控制的除草機器人自主導航_郭偉斌
2017-01-12 22:50:413 LNM-v1.0 激光導航模塊是一款基于室內復雜壞境的導航模塊,該模塊通過激光雷達對室內環境進行掃描自主構建地圖。LNM 模塊只要配合激光雷達或者二維深度傳感器就可以自主構圖并自主規劃路徑,可在室內真正的實現機器人的無軌自主導航。
2017-08-28 10:05:3424 去年,Facebook使用叫ReDex的字節碼優化工具優化了他們的安卓應用的性能。 現在,ReDex已經開源了。安卓開發者可以免費地使用這個工具優化自己的應用。也可以將它用作其它安卓字節碼優化工具
2017-10-11 11:13:140 天文導航是一種重要的衛星白主定軌方法,它僅需利用衛星白帶的姿態敏感部件星敏感器、紅外地平儀等,且不需要與外界進行任何的信息交互,是一種完全意義上的白主定軌方法。對低軌衛星、中高軌衛星和深空探測器
2017-11-03 14:22:455 視覺導航作為新興起的技術,受眾多研究者的青睞.設計了以現場可編程門列陣(FPGA)為控制核心的自主導航小車,采用一種新穎的自適應路徑識別算法實現路徑的識別與提取,并結合圓弧路線規劃和控制策略完成小車的自主導航控制.自適應路徑識別算法使導航小車可以適應多種光照和路面條件.
2017-11-18 12:29:353889 
狹隘環境的路徑避碰規劃是地面自主車(Autonomous Land Vehicle,ALV)自主導航的關鍵技術之一,是指在各種復雜的地面環境中,無需人工干預就可以自主完成各種工作。自主地面車ALV
2018-01-05 10:44:502 針對未知環境中移動機器人的導航問題,基于生物學的認知和發育機理構建自主導航的認知發育模型。通過自主插入神經元節點,設計結構可動態發育的神經網絡,模擬生物的發育特性達到與應用需求相匹配的網絡規模。通過
2018-01-17 11:09:412 從協同化、體系化、一體化適應未來戰爭的信息化,跨域化、高速化、多用化適應未來戰爭的立體多維化,自主化、平臺化、小型化適應未來戰爭的無人智能化3個方面概述了未來戰略新常態下武器裝備對自主導航控制的需求
2018-01-23 17:22:250 的發展成熟,全球定位系統-GPS系統的廣泛應用,其具有實時定位快,精度高、實時效果佳、使用方便等優點。自主導航作為無人機的重要需求功能之一,得到了充分的重視和快速發展,逐漸發展出了一個嶄新的獨立模塊一一航跡系統。本文介紹了一種小型無人機自主導航
2018-02-24 15:12:030 激光導航掃地機器人能自主掃描家庭環境并成像,生成2D地圖,有條不紊地進行路徑規劃,分區清掃;使用弓字型清掃路線,并依據家居環境的變化實時更新地圖,智能識別避開障礙物;自主回去充電,支持斷點續掃,隨時
2018-04-18 11:51:396472 Facebook近日宣布,將于近期開源PyTorch 1.0 AI框架,據悉,該框架是PyTorch與Caffe 2的結合,可以讓開發者無需遷移就從研究轉為生產。
2018-05-08 14:58:433182 導讀: Facebook近日宣布,將于近期開源PyTorch 1.0 AI框架,據悉,該框架是PyTorch與Caffe 2的結合,可以讓開發者無需遷移就從研究轉為生產。 Facebook近日宣布
2018-06-18 10:30:002901 Facebook在社交媒體中的地位自是不言而喻的,Facebook對人類社交的研究也一直都在時代的前列。同時Facebook十分看重新技術,尤其是近來大熱的AR技術。近日Facebook推出了新的AR涂鴉工具,讓你在視頻中實時涂鴉。
2018-09-05 14:30:00904 11月1日,Facebook開源了Horizon,一個由Facebook的AI研究人員、推薦系統專家和工程師共同搭建的強化學習平臺,其框架的構建工作開始于兩年半前,在過去一年中一直被Facebook內部使用。
2018-11-05 09:34:17722 Facebook 還開源了 Horizon ,這是一個基于 PyTorch 1.0 構建的端到端平臺,也是第一個使用應用強化學習(RL)來優化大規模生產環境中的系統的平臺。同時還擴展了 ONNX
2019-01-09 16:12:254213 美國科研人員24日在美國《科學·機器人學》雜志上發表報告說,他們研發出一種可以在跳動心臟周圍自主導航的微型醫療機器人,從而能幫助外科醫生完成復雜的心臟手術。 研究顯示,在一個對動物實施的心臟瓣膜修復
2019-05-14 15:02:442478 的方式,組裝搭建了四旋翼無人機自主導航實驗平臺,設計了基于北斗的農用無人機自主導航系統,并在實驗室環境和室外大田環境下進行懸停試驗和自主導航飛行試驗,經試驗優化與驗證,初步實現了農用無人機的自主導航。
2019-05-13 08:00:0012 Omron Adept Technologies最近獲得了三項移動機器人專利。每項專利都涉及不同的移動機器人解決方案,包括:運輸車、作業管理系統(Enterprise Manager)和用于作業管理的自主導航車。
2019-05-25 09:43:073016 Facebook的AI,已經可以用比爾蓋茨的聲音說話,機器語音系統一直有點令人失望:即使是最好的文本語音轉換系統也擺脫不了機械的特性,缺乏人類說話時的基本語調變化。斯蒂芬霍金使用的語音系統就是一個很好的例子。
2019-06-29 10:51:22392 近日,Facebook推出一個開源的模擬數據集,希望幫助研究人員創建更加真實的AR/VR體驗,最終目的是幫助 AI 了解物理世界的環境。
2019-06-18 17:07:083081 Facebook AI Research剛剛推出一個名為AI Habitat的項目,研究對象為一款可以訓練人工智能替身的模擬器。它可以像家庭機器人一樣在模擬的環境中運行。
2019-06-20 15:16:403242 Facebook AI近期對機器人技術非常熱衷,剛剛又開源了機器人框架PyRobot,該框架是與卡內基梅隆大學合作創建,可運行由Facebook的機器學習框架PyTorch訓練的深度學習模型。
2019-06-24 15:14:213675 近日,佛羅里達人類與機器認知研究所 (IHMC)發布最新雙足機器人視頻(這次是真的,不是CG),展示了實驗體波士頓動力機器人Atlas可自主導航,通過不同地形路面,完全實現機器人自主行走!
2019-07-09 14:22:072731 Facebook的AI和機器學習部門Facebook AI Research(FAIR)今天詳細介紹了名為Blender的綜合AI聊天機器人框架的工作。
2020-05-09 22:40:491611 環境信息,利用人工智能識別、理解、推理并進行判斷和決策來完成一定的任務。因此智能機器人除了具有環境感知能力外,還具有較強的識別理解能力和決策規劃能力。 定位是機器人實現自主導航的基本環節 目前,自主移動機器人
2021-10-14 14:30:551562 導航方法, 它的靈感來源于自然界中的昆蟲視覺機理,由此而進行仿生、光譜分析、圖像識別、自主導航等一系列工作,使微型飛行器實現像昆蟲一樣自由飛行而創造了理論和技術基礎。
2020-08-13 17:43:255 雖然視覺是感知的基礎,但聲音也同樣重要。聲音能捕捉豐富的信息,這些信息通常難以通過視覺或力的數據察覺,比如干葉子的紋理或香檳瓶內的壓力。但很少有系統和算法利用聲音作為構建物理理解的工具,因此Facebook發布了SoundSpaces。
2020-08-31 10:56:441405 據外媒報道,近日,美國專利商標局公布了蘋果公司的一項專利申請,該項專利與汽車的自主導航系統有關,其中包括基于車輛預測性軌跡信息的各種動態元素以及采用新型“意圖識別”模塊識別情境線索的真實世界動態元素。
2020-11-09 10:56:181456 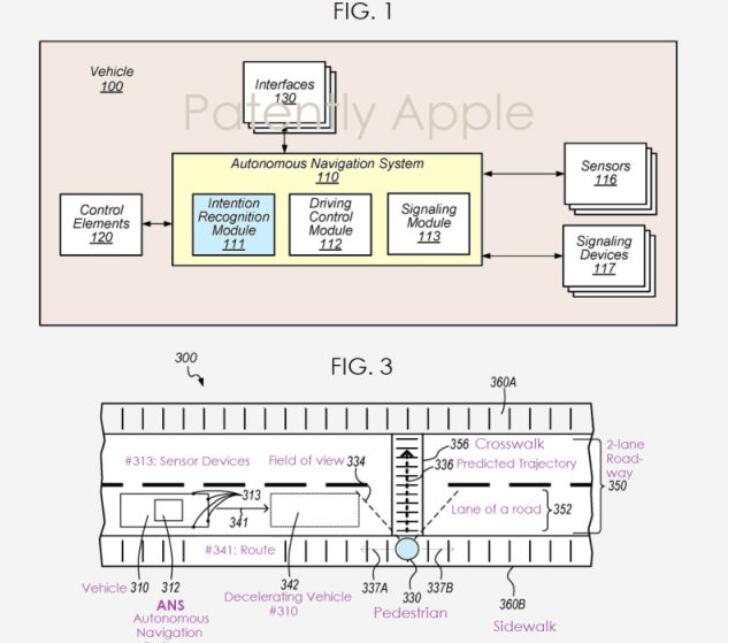
蘋果的造車計劃中又新添一項專利。據外媒報道,近日,美國專利商標局公布了蘋果公司申請的一項與汽車的自主導航系統(ANS)有關的專利,其可以對車道、道路標志、其他車輛的位置、行人的當前位置等進行處理,從而實現自主駕駛。
2020-11-10 14:23:261668 蘋果對汽車領域正展現出越來越濃厚的興趣。近日,蘋果公布了一個關于汽車自主導航系統的專利,通過這個系統,汽車就可以實現自主導航。 在某些情景下,這個自主導航系統可以收集外部的靜態環境和動態環境,從而
2020-11-16 17:04:562110 在 十五屆全國大學生智能汽車競賽[1] 中安排后一個聲音信標導航[2] 競賽組別。參賽同學反饋,聲音信標發送的Chirp信號[3] 在遠處聽起來會令人產生一種恐慌緊張的感覺,極大擾民。 如果將信標
2020-11-19 16:09:271961 無人機、無人車、無人船、機器人等代表性無人系統的智能自主控制是當前自動控制領域的研究熱點,更是提升無人系統自主性和智能化水平的核心技術。自主導航技術利用對應的自主導航系統獲取無人系統自身的位置、速度
2020-11-19 16:38:453830 ? ? 近期,科聰最新MRC3000控制器震撼上市,基于MRC3000為核心的移動機器人自主導航控制系統現可試用。 解決方案以MRC3000控制器為核心,適用于倉儲物流、航天軍工、智慧城市、智能制造
2020-12-25 09:57:385558 (人工智能安全實驗室) 趙鼎教授團隊分享了其在自主導航機器人領域的最新研究方向,該項目以開源自主連接和自動化研究車輛平臺(OpenCAV Platform)為基礎,通過搭建包括雷達、激光雷達、攝像機等一系列傳感器,實現了機器人室內外導航、避障等功能。 卡耐基梅隆大學 Safe AI 實驗室
2021-03-12 11:09:592012 電子發燒友網為你提供STM32的磁導航自主導引車通用驅動器設計資料下載的電子資料下載,更有其他相關的電路圖、源代碼、課件教程、中文資料、英文資料、參考設計、用戶指南、解決方案等資料,希望可以幫助到廣大的電子工程師們。
2021-04-21 08:40:0617 同時定位與地圖構建( Simultaneous lolaliκ ation And Mapping,SLAM)是未知環境下實現機器人自主導航的主要方法, Fastslam是一個著名的SLAM問題解決
2021-05-07 15:13:298 隨著人工智能語音應用進入差異化競爭時代,AI定制化聲音產品與服務已“飛入尋常百姓家”,越來越多地出現在車載導航、智能硬件、新聞播報、有聲閱讀等現實場景中。 交互對話中,針對車載導航、智能硬件等提供
2021-06-13 15:52:001452 預測表明,自主導航設備市場將迎來更廣闊的發展前景。其中,英國政府的研究預測,到2035年,全球L3-L5級別的自動駕駛車輛的全球市場估值將達到8900億美元,為此類車輛提供支持的互聯和自動駕駛技術的市場估值為1370億美元。
2022-04-02 14:29:411213 隨著新興行業發展,越來越多的移動機器人投入使用,它們須在新的動態環境中實現可靠的自主導航。移動機器人或自動引導車輛(AGV)導航功能的實現,都離不開 LiDAR 激光傳感器。LiDAR ,是一種光學
2022-05-20 13:06:042466 電子發燒友網站提供《允許使用打印或剪切卡EscornaFicha 2開源.zip》資料免費下載
2022-08-22 16:26:142 據兩位業內人士透露的消息和政府文件稱,印度正在推動科技巨頭在幾個月內使其智能手機與該國的自主導航系統兼容,這令三星、小米和蘋果等公司感到擔憂,理由是擔心兼容NavIC會推高研發和生產成本。
2022-09-27 10:05:28690 電子發燒友網站提供《自主導航和繪制二維地圖的機器人.zip》資料免費下載
2022-10-18 17:10:200 電子發燒友網站提供《盲桿導航器開源分享.zip》資料免費下載
2022-10-24 09:39:250 至于說有“開源不適合 AI”的聲音出現,其實有點以偏概全。AI 的開源應該是包含了很多層面上的,例如基礎設施、軟件環境、框架、算法、應用等等,而不僅僅是一個模型的訓練。
2022-12-12 11:45:11461 我們先來理清自主導航的框架,其關鍵是自主定位和路徑規劃。針對這兩個核心功能,ROS提供了一套完整的框架支持,收到導航目標位置后,機器人只需要發布必要的傳感器信息,框架中的功能包即可幫助機器人完成導航。
2023-02-06 11:52:45515 ,在人類社會中發揮著越來越重要的作用。但移動機器人擁有自主導航能力,才能進一步完成上訴所設定的任務。可以說自主導航能力是移動機器人最為基礎和核心的技術,而上位機軟件的實現與設計,則進一步推動機器人的完善發展。在
2023-06-09 13:12:04544 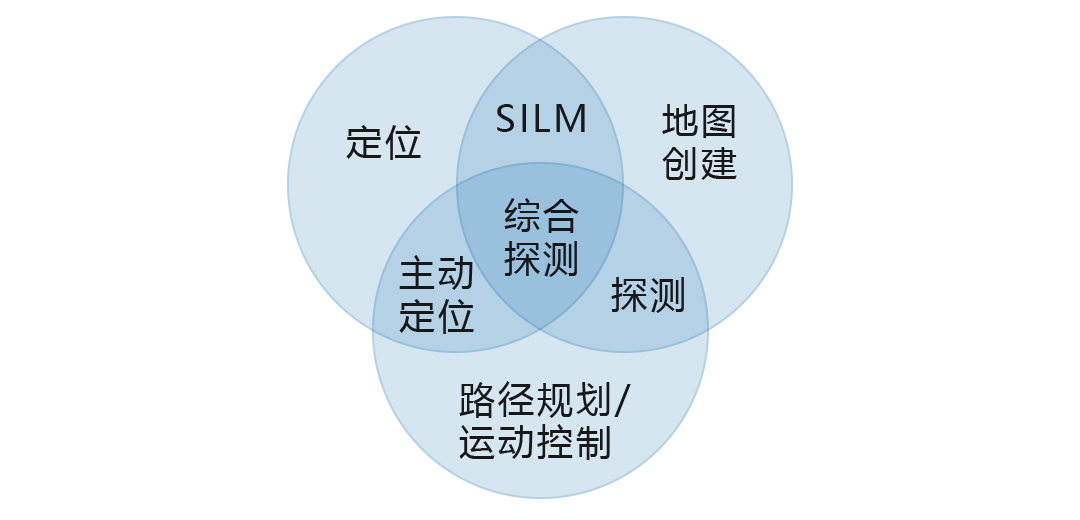
,在人類社會中發揮著越來越重要的作用。但移動機器人擁有自主導航能力,才能進一步完成上訴所設定的任務。可以說自主導航能力是移動機器人最為基礎和核心的技術,而上位機軟件的實
2023-05-29 17:06:45610 
電子發燒友網站提供《自主導航機器人的創建.zip》資料免費下載
2023-06-27 11:16:460 Meta(原 Facebook)開源了全新的 CSS-in-JS 庫 StyleX。
2023-12-14 10:03:27216
 電子發燒友App
電子發燒友App









 工商網監
工商網監
評論