 電子發(fā)燒友App
電子發(fā)燒友App


徐丸絮,沈吟東
(華中科技大學(xué) 人工智能與自動(dòng)化學(xué)院,湖北 武漢 430074)
摘??要:傳統(tǒng)的公交行程時(shí)間預(yù)測(cè)模型由于忽略了歷史時(shí)刻中的信息,導(dǎo)致預(yù)測(cè)精度不理想。針對(duì)公交行程時(shí)間的時(shí)序性,提出一種基于 LSTM 神經(jīng)網(wǎng)絡(luò)的預(yù)測(cè)模型,并引入注意力(Attention)機(jī)制對(duì)其進(jìn)行優(yōu)化。首先,綜合考慮多種影響因素,設(shè)計(jì)了多變量 LSTM 模塊,將當(dāng)前時(shí)刻的行程時(shí)間與歷史時(shí)刻數(shù)據(jù)相關(guān)聯(lián),對(duì)其中的多維度特征進(jìn)行信息提取;隨后針對(duì)單一 LSTM 網(wǎng)絡(luò)無(wú)法自動(dòng)識(shí)別不同信息重要性的局限性,引入 Attention 機(jī)制,使模型聚焦重點(diǎn)信息、忽略冗雜信息;最后,采用實(shí)際公交 GPS數(shù)據(jù)驗(yàn)證了該方法的有效性。實(shí)驗(yàn)結(jié)果表明,與五種常見(jiàn)方法相比,該模型具有更高的精度。
中圖分類號(hào):TN99?34??文獻(xiàn)標(biāo)識(shí)碼:A
文章編號(hào):1004?373X(2022)03?0083?05
0 引 言
公交行程時(shí)間是智能交通系統(tǒng)的重要組成部分,準(zhǔn)確的行程時(shí)間信息為公交智能優(yōu)化排班、實(shí)時(shí)調(diào)度、公交交叉口優(yōu)先控制等提供重要依據(jù),對(duì)公交資源動(dòng)態(tài)配置、城市交通結(jié)構(gòu)規(guī)劃等有深遠(yuǎn)意義。
近年來(lái),國(guó)內(nèi)外學(xué)者對(duì)這一問(wèn)題展開(kāi)了廣泛研究,提出的預(yù)測(cè)模型主要包括4類:
1)卡爾曼濾波器模型[1?2]。如文獻(xiàn)[1]分析了異構(gòu)交通條件下時(shí)間的離散化模式,以此構(gòu)建了基于卡爾曼濾波器的預(yù)測(cè)模型。但是該模型考慮因素較單一,且適用于線性系統(tǒng),對(duì)于高度非線性的公交行程時(shí)間預(yù)測(cè)問(wèn)題并不是很合適。
2)支持向量機(jī)(SVM)模型[3?4]。如文獻(xiàn)[3]選取時(shí)段、天氣等7維特性構(gòu)建了改進(jìn)的 SVM 預(yù)測(cè)模型,并在廈門BRT?1路的數(shù)據(jù)上驗(yàn)證了模型精度。但該類模型計(jì)算復(fù)雜度高,不能很好地處理大規(guī)模數(shù)據(jù)。
3)決策樹模型。如文獻(xiàn)[5]構(gòu)建了一種基于梯度提升回歸樹(GBRT)的預(yù)測(cè)模型,測(cè)試結(jié)果比SVM和自回歸平均法的預(yù)測(cè)精度有所提高。該模型可解釋性強(qiáng),但是存在模型速率低、易過(guò)擬合等問(wèn)題。
4)神經(jīng)網(wǎng)絡(luò)模型。該模型在行程時(shí)間預(yù)測(cè)問(wèn)題中使用最為廣泛,如文獻(xiàn)[6]將螢火蟲算法與BP神經(jīng)網(wǎng)絡(luò)結(jié)合,構(gòu)建了預(yù)測(cè)模型;文獻(xiàn)[7]構(gòu)建了面向動(dòng)態(tài)站點(diǎn)的BP 神經(jīng)網(wǎng)絡(luò)預(yù)測(cè)模型,實(shí)現(xiàn)了跨越多個(gè)站點(diǎn)的預(yù)測(cè);文獻(xiàn)[8]通過(guò)采集到的歷史和實(shí)時(shí)數(shù)據(jù)構(gòu)建了神經(jīng)網(wǎng)絡(luò)。神經(jīng)網(wǎng)絡(luò)能夠較好地?cái)M合非線性問(wèn)題,在行程時(shí)間預(yù)測(cè)問(wèn)題上很有意義,然而公交行程時(shí)間具有時(shí)序性,即當(dāng)前時(shí)刻行程時(shí)間與歷史時(shí)刻密切相關(guān),上述模型的不足之處在于僅考慮了當(dāng)前時(shí)刻的信息,沒(méi)有充分利用歷史時(shí)刻的數(shù)據(jù),導(dǎo)致模型精度受限。
深度學(xué)習(xí)與傳統(tǒng)的學(xué)習(xí)方法相比,它具備更強(qiáng)大的數(shù)據(jù)學(xué)習(xí)和抽象能力。LSTM(Long Short?Term Memory)作為目前最熱門的深度學(xué)習(xí)技術(shù)之一,能夠保存歷史信息,既繼承了傳統(tǒng)神經(jīng)網(wǎng)絡(luò)的優(yōu)勢(shì),又能挖掘歷史時(shí)刻數(shù)據(jù),在處理時(shí)序問(wèn)題上很有優(yōu)勢(shì)[9],近幾年得到了廣泛應(yīng)用。文獻(xiàn)[10]使用英國(guó)66個(gè)路段的數(shù)據(jù)構(gòu)建了改進(jìn)的LSTM模型;文獻(xiàn)[11]采用LSTM網(wǎng)絡(luò)進(jìn)行預(yù)測(cè),并與BP神經(jīng)網(wǎng)絡(luò)進(jìn)行了對(duì)比,結(jié)果證明LSTM精度更優(yōu)。然而傳統(tǒng)的LSTM將輸入序列轉(zhuǎn)換為定長(zhǎng)向量而保存所有的信息,使得模型記憶受限,在處理長(zhǎng)序列問(wèn)題時(shí)易丟失信息。
Attention機(jī)制的提出可以彌補(bǔ)這一缺陷,它能為不同信息賦予權(quán)重,加強(qiáng)對(duì)重要信息的記憶,忽略無(wú)關(guān)信息。近年來(lái),結(jié)合注意力機(jī)制的神經(jīng)網(wǎng)絡(luò)成為研究的熱點(diǎn),被廣泛應(yīng)用于機(jī)器翻譯、圖像分類等領(lǐng)域,在公交行程時(shí)間預(yù)測(cè)問(wèn)題上的研究相對(duì)較少。因此,本文提出一種基于Attention機(jī)制的LSTM預(yù)測(cè)模型,利用LSTM模塊,對(duì)歷史數(shù)據(jù)中多種因素同步分析,針對(duì)LSTM的局限性,融入Attention機(jī)制,自動(dòng)抽取關(guān)鍵信息,優(yōu)化模型。最后與五種常見(jiàn)方法進(jìn)行對(duì)比發(fā)現(xiàn),該模型有更高的預(yù)測(cè)精度。
1 問(wèn)題定義
本文旨在基于公交企業(yè)積累的大量行程時(shí)間樣本,設(shè)計(jì)一個(gè)行程時(shí)間預(yù)測(cè)方法。公交行程時(shí)間在不同日期、時(shí)段是隨機(jī)變化的,與路況、事故等動(dòng)態(tài)因素密切相關(guān)[12]。由于班次之間時(shí)間間隔較短,相鄰班次之間的路段狀況具有相似性,因此歷史時(shí)刻的數(shù)據(jù)中蘊(yùn)含著影響未來(lái)的信息,即當(dāng)前時(shí)刻的行程時(shí)間與歷史時(shí)刻有關(guān),由此可見(jiàn),公交行程時(shí)間具有時(shí)序性,是一個(gè)前后關(guān)聯(lián)的時(shí)間序列。
根據(jù)行程時(shí)間的時(shí)序性,該問(wèn)題可描述如下,由前s 個(gè)時(shí)刻的歷史行程時(shí)間序列 [yt-s,?, yt-2 , yt-1](s代表時(shí)間步長(zhǎng)度,即歷史時(shí)刻個(gè)數(shù))和歷史特征[xt-s,?,xt-2, xt-1]預(yù)測(cè)t時(shí)刻的公交行程時(shí)間yt,即:

式中:xi=(xi,1,xi,2,?,xi,n)T代表第i時(shí)刻影響行程時(shí)間的多種因素的取值向量,n代表影響因素的個(gè)數(shù);F為函數(shù),代表預(yù)測(cè)值與輸入值之間的某種映射關(guān)系。本文的目的就是找到合適的模型用于擬合這種復(fù)雜的非線性映射。
2 公交行程時(shí)間影響因素分析
常見(jiàn)的LSTM模型僅考慮“歷史行程時(shí)間”這一種歷史數(shù)據(jù)[10?11],然而行程時(shí)間受多種因素影響,如果模型僅對(duì)單變量進(jìn)行處理,并不能充分考慮多種影響因素的變化。因此本節(jié)對(duì)行程時(shí)間影響因素進(jìn)行分析,以期得到更全面的輸入特征。
影響公交行程時(shí)間的不確定因素主要包括道路因素、交通因素、天氣情況等[13]。道路和交通因素如路段狀況、行人數(shù)量、乘客數(shù)量等信息,動(dòng)態(tài)影響著行程時(shí)間;天氣情況如降雨、降雪、大霧等會(huì)影響公交速度和司機(jī)反應(yīng)時(shí)間,從而影響行程時(shí)間。
根據(jù)上述行程時(shí)間影響因素分析,本文選取了行駛特征集以描述道路和交通因素,選取了天氣特征集以描述天氣因素,以此作為模型輸入。具體獲取和處理如下:
1)行駛特征集
由于路況、人流等實(shí)時(shí)信息無(wú)法直接獲取,為反映車輛行駛路段狀況、人流量等信息,選取當(dāng)天是否是周末、是否是高峰期等靜態(tài)特征,同時(shí)提取車輛平均速度、車輛行駛方向等作為動(dòng)態(tài)特征,用以反映實(shí)時(shí)交通狀況。
2)天氣特征集
采用網(wǎng)絡(luò)爬蟲獲取結(jié)構(gòu)化的天氣數(shù)據(jù),主要包含如下屬性:時(shí)間、溫度、氣壓、天氣狀況等。選取其中與行程時(shí)間密切相關(guān)的溫度和天氣狀況作為天氣特征集。
綜上所述,選取的輸入特征一共有6個(gè),分別為當(dāng)天是否是周末、是否是高峰期、車輛平均速度、車輛行駛方向、溫度、天氣狀況,即影響因素的個(gè)數(shù)n=6。
3 基于 Attention?LSTM 的公交行程時(shí)間預(yù)測(cè)模型
公交行程時(shí)間是一個(gè)典型的時(shí)間序列,LSTM網(wǎng)絡(luò)能自動(dòng)保存歷史序列信息,更好地利用其時(shí)序性。然而不同信息對(duì)于預(yù)測(cè)時(shí)刻的影響程度是隨時(shí)間動(dòng)態(tài)變化的,例如,對(duì)早晚高峰期來(lái)說(shuō),人流量對(duì)行程時(shí)間的影響要大于對(duì)平峰期的影響;單一的LSTM模型將輸入序列轉(zhuǎn)換為定長(zhǎng)向量而保存所有的信息,并不能檢測(cè)哪些是影響當(dāng)前行程時(shí)間的重要部分,降低了信息的利用率;Attention機(jī)制的加入能解決這一問(wèn)題,它為模型分配不同的注意力,使模型能自動(dòng)處理不同信息的重要程度。本文嘗試將LSTM與Attention機(jī)制結(jié)合,用于公交行程時(shí)間預(yù)測(cè),本文提出的Attention?LSTM預(yù)測(cè)模型整體結(jié)構(gòu)如圖1所示。
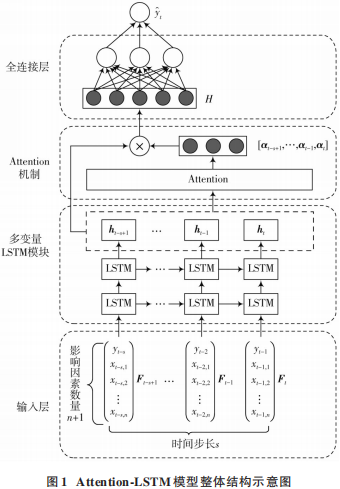
由圖1可見(jiàn),該模型由4個(gè)部分組成:輸入層負(fù)責(zé)將預(yù)處理后的數(shù)據(jù)轉(zhuǎn)換成模型可讀的形式;多變量LSTM模塊負(fù)責(zé)對(duì)包含多種影響因素的輸入數(shù)據(jù)進(jìn)行處理,獲取特征信息;Attention 機(jī)制負(fù)責(zé)學(xué)習(xí)一組注意力系數(shù),對(duì)特征信息進(jìn)行篩選;全連接層接收篩選后的特征信息,處理得到最終的行程時(shí)間預(yù)測(cè)結(jié)果。輸入層和全連接層是模型完成預(yù)測(cè)任務(wù)必需的組件,其結(jié)構(gòu)由數(shù)據(jù)本身的維度決定,整個(gè)模型的重點(diǎn)部分在于多變量 LSTM模塊與Attention機(jī)制。
3.1 多變量 LSTM 模塊
基本的LSTM網(wǎng)絡(luò)是由多個(gè)記憶神經(jīng)元按時(shí)間次序連接而成的[14]。經(jīng)典的記憶神經(jīng)元內(nèi)部結(jié)構(gòu)如圖2所示。
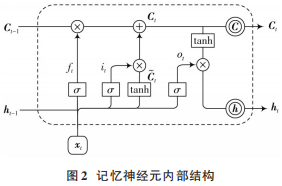
由圖2可見(jiàn),記憶神經(jīng)元內(nèi)部由輸入門it、遺忘門ft、輸出門ot三種門結(jié)構(gòu)組成,它們共同控制著信息的更新與遺忘,計(jì)算公式見(jiàn)式(2)~式(7):????

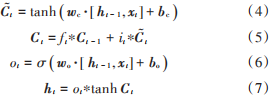
式中:σ代表sigmoid函數(shù);Ct和Ct-1分別代表LSTM單元在t 時(shí)刻和t-1時(shí)刻的狀態(tài);Ct 代表當(dāng)前單元狀態(tài)更新值;ht和ht-1分別為當(dāng)前單元和上一單元的中間狀態(tài);wf,wi,wo,bf,bi和bo為模型訓(xùn)練得到的權(quán)重矩陣和偏移量。
由此可見(jiàn),LSTM網(wǎng)絡(luò)通過(guò)門結(jié)構(gòu)對(duì)信息進(jìn)行繼承,能夠?qū)崿F(xiàn)更長(zhǎng)期的記憶。本文利用這一特性,在基本LSTM的基礎(chǔ)上設(shè)計(jì)了多變量LSTM模 塊 ,該模塊由兩層LSTM網(wǎng)絡(luò) 堆疊而成 ,在t時(shí)刻的輸入為Ft=[yt-1, xt-1,1,xt-1,2,?,xt-1,n ]T,其不僅接收上一時(shí)刻的歷史行程時(shí)間真實(shí)值yt-1,且對(duì)代表多種影響因素的序列[xt-1,1,xt-1,2,?,xt-1,n ]T進(jìn)行處理,多變量的引入使模型從更多方面接收反映行程時(shí)間的信息,可以更充分地挖掘歷史數(shù)據(jù);最終獲得整個(gè)模塊在t時(shí)刻的輸出向量[ht-s+1,?,ht-1,ht],其中蘊(yùn)含著用于行程時(shí)間預(yù)測(cè)的多維度信息。
3.2?結(jié)合 LSTM 的Attention機(jī)制
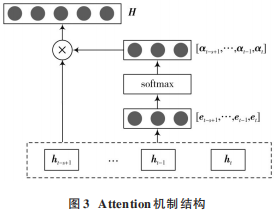
本文引入的Attention機(jī)制結(jié)構(gòu)如圖3所示,其對(duì)LSTM模塊的輸出向量[ht-s+1 ,?,ht-1 ,ht]進(jìn)行學(xué)習(xí),得到一系列注意力系數(shù)[αt-s+1,?,αt-1,αt],用以表示每一中間狀態(tài)的重要程度。最后對(duì)各中間狀態(tài)加權(quán)求和得到輸出序列H,計(jì)算公式見(jiàn)式(8)~式(10)
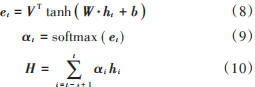
式中:V,W代表權(quán)重矩陣;b為相應(yīng)的偏置值;et為計(jì)算t時(shí)刻注意力系數(shù) αt的中間值。
由此可見(jiàn),融合Attention機(jī)制后,模型可以自主學(xué)習(xí)各狀態(tài)的重要程度,從復(fù)雜的數(shù)據(jù)中提取出重要的部分。
4 實(shí)驗(yàn)與分析
為了測(cè)試所提出模型的性能,基于真實(shí)數(shù)據(jù)進(jìn)行實(shí)驗(yàn),并與多種常見(jiàn)預(yù)測(cè)模型進(jìn)行對(duì)比,以驗(yàn)證該模型的有效性。
4.1 數(shù)據(jù)預(yù)處理
本文采用某市290路公交車2017年1月1日—2月28日不同班次產(chǎn)生的GPS數(shù)據(jù)作為研究對(duì)象,該數(shù)據(jù)的每一行代表一條公交行程記錄,每一列代表不同的屬性;為了避免數(shù)據(jù)缺失對(duì)模型預(yù)測(cè)造成影響,采用缺失值的前 1天以及后 1天相同時(shí)刻的數(shù)據(jù)均值補(bǔ)全缺失數(shù)據(jù)。另外,為了使輸入數(shù)據(jù)數(shù)量級(jí)保持一致,采用最大最小值歸一化法,使數(shù)據(jù)都被限定在[0,1]范圍內(nèi)。
4.2 模型參數(shù)設(shè)置及評(píng)價(jià)
通過(guò)多次實(shí)驗(yàn)發(fā)現(xiàn),當(dāng)時(shí)間步長(zhǎng)s為 9、LSTM隱含層節(jié)點(diǎn)數(shù)為8時(shí)模型表現(xiàn)最好。為了提高訓(xùn)練速率,采用批量訓(xùn)練的方式,每批含72組樣本數(shù)據(jù),為了避免過(guò)擬合,在每層 LSTM 網(wǎng)絡(luò)后增加隨機(jī)失活(dropout)層,參數(shù)設(shè)置為0.2,選擇平均絕對(duì)誤差(MAE)作為訓(xùn)練的損失函數(shù),采用 Adam 算法對(duì)網(wǎng)絡(luò)進(jìn)行訓(xùn)練,迭代次數(shù)設(shè)置為 100次。
為評(píng)估模型的可靠性,本文同時(shí)采用平均絕對(duì)誤差(MAE)與平均絕對(duì)相對(duì)誤差(MAPE)評(píng)估模型的預(yù)測(cè)能力。具體見(jiàn)式(11)和式(12),其中yi表示預(yù)測(cè)值,yi表示真實(shí)值,m表示實(shí)驗(yàn)所用數(shù)據(jù)總量。
當(dāng)MAE越小時(shí),表示誤差越小;當(dāng)MAPE越小時(shí),表示預(yù)測(cè)精確度越高。
4.3 結(jié)果分析
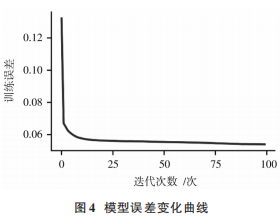
本文采用的數(shù)據(jù)集一共12157條,選擇前9000條數(shù)據(jù)作為訓(xùn)練集,后3157條數(shù)據(jù)作為測(cè)試集,模型訓(xùn)練過(guò)程中誤差變化趨勢(shì)如圖4所示。由圖4可知 ,Attention?LSTM模型誤差不斷下降,較快達(dá)到收斂,最終誤差降為0.544,說(shuō)明訓(xùn)練結(jié)果良好。
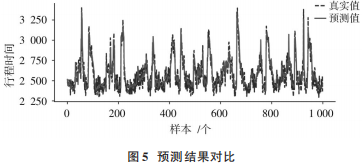
為了以更直觀的方式驗(yàn)證模型預(yù)測(cè)效果,利用該模型對(duì)測(cè)試集中隨機(jī)選取的1000個(gè)樣本進(jìn)行預(yù)測(cè),結(jié)果如圖5所示。由圖5可見(jiàn),所提出的模型能夠較好地?cái)M合行程時(shí)間的劇烈變化。
為分析Attention機(jī)制的加入對(duì)模型的影響及有效性,對(duì)模型預(yù)測(cè)過(guò)程中不同時(shí)間步的注意力系數(shù)結(jié)果進(jìn)行展示,如圖6所示。
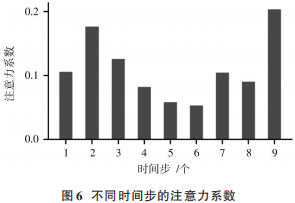
由圖6可以看出:不同時(shí)間步對(duì)行程時(shí)間的影響程度不同,注意力系數(shù)使得模型重點(diǎn)關(guān)注第2,3,9個(gè)時(shí)間步,而對(duì)第5,6個(gè)時(shí)間步的關(guān)注較低,由此可見(jiàn),Attention機(jī)制可以使模型自動(dòng)關(guān)注重要的歷史時(shí)刻,從而提高了模型對(duì)關(guān)鍵信息的篩選與利用。同時(shí)也說(shuō)明,公交行程時(shí)間是一個(gè)明顯的時(shí)序性數(shù)據(jù),模型的注意力并非集中在距離預(yù)測(cè)點(diǎn)較近的時(shí)間步上,而是對(duì)長(zhǎng)時(shí)間步中的信息都有關(guān)注。
為了進(jìn)一步比較提出的Attention ?LSTM模型和其他模型的預(yù)測(cè)性能,本文構(gòu)造了 BPNN、RNN、LSTM、GBRT、XGBoost等五種常見(jiàn)預(yù)測(cè)方法,在相同的測(cè)試集上進(jìn)行預(yù)測(cè),得到的預(yù)測(cè)結(jié)果如表 1所示。
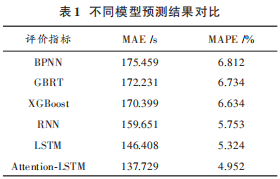
根據(jù)表1可以得到如下結(jié)論:
1)與其他幾種常見(jiàn)的預(yù)測(cè)模型相比,本文構(gòu)建的Attention?LSTM 模型在各項(xiàng)指標(biāo)中均為最優(yōu),在測(cè)試集中MAE=137.729,MAPE=4.952%。另外,與RNN 相比,預(yù)測(cè)精度提高了21.9s左右,精度提高了1.8%左右,證明了LSTM在處理公交行程時(shí)間這類長(zhǎng)序列問(wèn)題上的優(yōu)勢(shì);與未融入Attention機(jī)制的LSTM 模型相比,預(yù)測(cè)結(jié)果提高了8.7s左右,精度提高了0.4% 左右,再次證明了Attention機(jī)制加入的有效性。
2)基于深度循環(huán)神經(jīng)網(wǎng)絡(luò)的這類模型(Attention?LSTM、LSTM 和 RNN)的預(yù)測(cè)性能明顯優(yōu)于傳統(tǒng)的淺層學(xué)習(xí)方法(BPNN)和決策樹類方法(GBRT、XGBoost),其原因在于模型深度和結(jié)構(gòu)的提升能夠更全面地捕捉數(shù)據(jù)中的信息,而循環(huán)神經(jīng)網(wǎng)絡(luò)類的模型能夠很好地利用行程時(shí)間的時(shí)序性,充分利用歷史數(shù)據(jù),使得預(yù)測(cè)精度提高,說(shuō)明了深度學(xué)習(xí)在預(yù)測(cè)問(wèn)題上的有效性。
5 結(jié) 語(yǔ)
本文針對(duì)公交行程時(shí)間的時(shí)序性,提出了融入Attention機(jī)制的LSTM預(yù)測(cè)模型。該模型利用LSTM模塊對(duì)多維度特征進(jìn)行捕捉,并通過(guò)Attention機(jī)制克服了LSTM的局限性,利用模型對(duì)復(fù)雜信息進(jìn)行篩選。實(shí)驗(yàn)結(jié)果表明,LSTM在行程時(shí)間預(yù)測(cè)問(wèn)題上很有優(yōu)勢(shì),Attention機(jī)制的引入,使模型能夠自動(dòng)關(guān)注重要的歷史時(shí)刻,提高了模型的預(yù)測(cè)精度。同時(shí),與五種常見(jiàn)預(yù)測(cè)方法相比,證明了該模型具有更高的預(yù)測(cè)可靠度,說(shuō)明此方法具有較高的實(shí)用價(jià)值。
注:本文通訊作者為沈吟東。
參 考 文 獻(xiàn)
[1] KUMAR B A,VANAJAKSHI L,SUBRAMANIAN S C. Pattern?based time ? discretized method for bus travel time prediction[J]. Journal of transportation engineering, part A:systems,2017,143(6):04017012.
[2] DEESHMA M,VERMA A. Travel time modeling for bus trans?port system in Bangalore city [J]. Transportation research,2015,7(1):47?56.[3] 張洋,程恩 .基于 ε?支持向量機(jī)回歸的快速公交到站時(shí)間預(yù)測(cè)[J].廈門大學(xué)學(xué)報(bào)(自然科學(xué)版),2017,56(3):442?448.
[4] BAI C,PENG Z R,LU Q C,et al. Dynamic bus travel timeprediction models on road with multiple bus routes [J]. Compu?tational intelligence and neuroscience,2015(3):432389.
[5] 龔越,羅小芹,王殿海,等 .基于梯度提升回歸樹的城市道路行程時(shí)間預(yù)測(cè)[J].浙江大學(xué)學(xué)報(bào)(工學(xué)版),2018,52(3):453?460.
[6] 彭新建,翁小雄. 基于螢火蟲算法優(yōu)化BP神經(jīng)網(wǎng)絡(luò)的公交行程時(shí)間預(yù)測(cè)[J]. 廣西師范大學(xué)學(xué)報(bào)(自然科學(xué)版),2017,35(1):28?36.
[7] 韓勇,周林,高鵬,等 . 基于 BP 神經(jīng)網(wǎng)絡(luò)的公交動(dòng)態(tài)行程時(shí)間預(yù)測(cè)方法研究[J].中國(guó)海洋大學(xué)學(xué)報(bào)(自然科學(xué)版),2020,50(2):142?154.
[8] XIE J M,CHOI Y K. Hybrid traffic prediction scheme for intel?ligent transportation systems based on historical and real ? timedata [J]. International journal of distributed sensor networks,2017,13(11):74500.
[9] AGAFONOV A A,YUMAGANOV A S. Bus arrival time pre?diction using recurrent neural network with LSTM architecture[J]. Optical memory and neural networks,2019,28(3):222?230.
[10] DUAN Y J,YISHENG L V,WANG F Y. Travel time predic?tion with LSTM neural network [C]// 2016 IEEE 19th Interna?tional Conference on Intelligent Transportation Systems(ITSC). Rio de Janeiro,Brazil:IEEE,2016:1053?1058.
[11] 張威威,李瑞敏,謝中教 .基于深度學(xué)習(xí)的城市道路旅行時(shí)間預(yù)測(cè)[J].系統(tǒng)仿真學(xué)報(bào),2017,29(10):2309?2315.
[12] 王殿海,湯月華,陳茜,等 . 基于 GPS 數(shù)據(jù)的公交站點(diǎn)區(qū)間行程時(shí)間可靠性影響因素[J]. 東南大學(xué)學(xué)報(bào)(自然科學(xué)版),2015,45(2):404?412.
[13] 王芳杰,王福建,王雨晨,等 .基于 LightGBM 算法的公交行程時(shí)間預(yù)測(cè)[J]. 交通運(yùn)輸系統(tǒng)工程與信息,2018,19(2):116?121.
[14] 王志建,李達(dá)標(biāo),崔夏 .基于 LSTM 神經(jīng)網(wǎng)絡(luò)的降雨天旅行時(shí)間預(yù)測(cè)研究[J].交通運(yùn)輸系統(tǒng)工程與信息,2020,20(1):137?144.
作者簡(jiǎn)介:
徐丸絮(1997—),女,江西鷹潭人,碩士研究生,研究方向?yàn)樯疃葘W(xué)習(xí)、公交行程時(shí)間預(yù)測(cè)。
沈吟東(1965—),女,安徽合肥人,博士,教授,博士生導(dǎo)師,研究方向?yàn)檫\(yùn)籌與優(yōu)化、公共交通規(guī)劃與調(diào)度、智能公交系統(tǒng)。
編輯:黃飛
?











 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論