據官方消息,清華大學計算機系圖形實驗室宣布開源一個全新的深度學習框架:Jittor,中文名計圖。 Jittor 是一個采用元算子表達神經網絡計算單元、完全基于動態編譯(Just-in-Time
2020-11-25 11:08:37 2782
2782 特征扭曲是光流估計的核心技術,然而扭曲過程中由遮擋區域引起的模糊性是一個尚未解決的主要問題。圖像扭曲導致遮擋區域的模糊,在特征扭曲過程中也存在同樣的問題,這些區域可以在沒有任何明確監督的情況下被掩蓋。
2022-09-08 11:49:351817 訓練數據仍然需要大量的人工,為進一步減少這一部分的人工,我們對弱標注數據下的深度學習進行了一些探索。隨著所要求監督信息的減弱,可用訓練數據會大量增加。同時,深度模型已經具有了很好的推廣能力,我們用深度
2017-03-22 17:16:00
描述 此 TI 參考設計實現了低側和高側寬動態范圍電流感應解決方案。寬動態范圍是通過獨特的增益開關方法實現的。硬件中的開關增益可使響應時間加快,快于通常可通過其他方法實現的時間。此設計中利用
2018-12-14 15:48:07
的多重租賃設備端深度學習移動視覺系統。NestDNN 用靈活的資源-準確率權衡代替了固定的資源-準確率權衡。在運行時方面,該框架為每個深度學習模型動態地選擇最優資源-準確率權衡,以滿足模型對系統可用運行時
2018-10-31 16:32:24
地平線在軟件算法上提供了基于深度學習的整體方案,具有高性能、低運算量的特點。在今年智車優行“奇點汽車”發布會上,地平線首次向外界展示了真車環境下,利用單目攝像頭同時實現行人/車輛/車道線檢測的ADAS產品
2017-01-06 18:09:34
描述該參考設計是單芯片充電和動態電源路徑管理 IC 解決方案。這是基于 bq24030 的全套電路設計,為評估 IC 的運行和性能提供了便利方法。開發解決方案中包括已經過測試的評估板、用戶指南(包含
2022-09-16 07:35:49
本帖最后由 richthoffen 于 2019-7-19 16:41 編輯
單軸雙輪自平衡代步車的研究與設計
2019-07-17 17:06:48
深度融合模型的特點,背景深度學習模型在訓練完成之后,部署并應用在生產環境的這一步至關重要,畢竟訓練出來的模型不能只接受一些公開數據集和榜單的檢驗,還需要在真正的業務場景下創造價值,不能只是為了PR而
2021-07-16 06:08:20
AC+AP的WLAN無線方案有應用場景嗎?都有哪些?
2020-10-16 14:07:01
算法實現。這些深度神經網絡創造性的通過合并了監督式學習(通過人類專家棋手的棋譜學習)和強化式學習(通過自我對弈的方式)來訓練。沒有任何的超前搜索,這些神經網絡已經通過自我對弈的方式模擬成千上萬的對局并使
2017-06-06 18:25:55
,可以更智能地應用于計算機視覺的相關領域中。方案搭建Firefly RK3399Pro開源主板 + 單目攝像頭方案特點高性能AI處理器采用RK3399Pro高性能AI主板,ARM六核處理器架構,主頻
2022-04-01 15:55:16
STM32 編譯后不能運行項目場景:問題描述:原因分析:解決方案:不能運行的其他幾個原因:項目場景:Keil MDK中創建STM32F103項目,可以編譯下載,但程序不能正常運行。問題描述:仿真調試
2021-08-24 07:32:09
UiPath的監督和報告-Kibana
2020-05-25 09:46:20
本帖最后由 clip 于 2013-1-14 16:11 編輯
目前市場上已經有單芯片實現HDMI轉VGA的方案(不帶Scaler的低成本方案),而且不止一家公司推出此類方案,但單芯片的VGA
2013-01-14 16:09:58
jlink的主要使用場景,有沒有可以替代的非硬件方案?
2023-10-07 09:00:45
把企業標注好的數據加載到華為云深度學習服務中,該服務就可以快速自動的訓練出企業的業務模型,這樣就免除了模型訓練的編程過程。比如在企業的生產場景,一般都有環境健康安全(EHS)檢查。以前企業的EHS檢查
2018-08-02 20:44:09
摘要: 概括F3經典使用場景1. 人工智能深度學習客戶,推理應用最近兩年,人工智能在全球掀起了巨大的應用熱潮,除了互聯網巨頭,如Google,Facebook,Alibaba之外,涌現出
2018-05-17 20:33:28
的暮色,在海思芯片加持的攝像機下幀幀清晰分明,細節紋理飽滿豐富,真彩如實。超級寬動態——動態范圍提升12dB海思越影超級寬動態技術,能夠基于價值目標進行場景識別自適應多重曝光,對不同曝光時間的長幀、中幀
2022-05-02 23:43:15
通信技術發展的日新月異,對深度覆蓋的要求越來越高.什么是TD-LTE深度覆蓋解決方案?這些方案有什么優勢?
2019-08-14 07:35:24
摘要:深度學習是一個既可以處理特征、學習特征又可以實現最后的排序打分的一套整體解決方案,借助深度學習的解決方案,搜索推薦的工作方式將發生巨大的變化。想知道阿里巴巴如何將在搜索推薦領域下應用深度學習
2018-05-08 16:28:04
為解決這問題并提供高動態范圍輸出含減少LED閃爍的方案,就需要采用創新的高電荷容量CMOS圖像傳感器,可以暴露足夠長的時間來捕獲脈沖光源而不會使場景的明亮區域達到飽和。而這方案正是安森美半導體在推出
2020-05-20 07:57:51
。 華為VDI存儲方案的亮點 為了對比華為OceanStor Dorado V3與傳統存儲陣列在VDI常用場景下的體驗差異,構建了如下環境對比測試: 通過對比業界主流產品最佳實踐數據,綜合華為
2018-11-29 11:41:44
分享一款不錯的HT8731單節鋰電3.7V內置自適應動態升壓15W單聲道F類音頻功放IC解決方案
2021-05-28 06:04:18
本文提出了一種基于嵌入式系統和Internet的FPGA動態配置方案。
2021-05-27 06:38:55
消除方案和基于深度學習的降噪方案推出了通話降噪方案,利用該方案可以實時消除回聲及環境噪聲,并通過算法優化提升語音信號的清晰度和逼真度,使得通話更加清晰、準確,提高語音交流的效率和舒適性,為用戶提供更好
2023-08-22 17:36:33
在微功耗場景下,使用RCC是否比低功耗芯片的效率更高?設計例子:單火取電項目,從AC線取電取電,交流220V轉直流12V,再通過DC-DC方案,將12V轉為3.3V供Zigbee工作,該Zigbee
2016-06-17 13:50:42
的單目內窺鏡定位系統設計(下)
導讀
隨著現科技的發展和社會的進步,信息科技迅速發展,我們可從互聯網、電臺等媒體獲取大量信息。現代信息的存儲、處理和傳輸變得越來越數字化。在人們的日常生活中,常用
2023-06-27 20:42:56
摘 要: 針對當前高采樣率ADC成本高昂、采樣精度較低的問題,提出了基于欠采樣的信號頻率估計方法,通過組合使用低速ADC,可以達到高速ADC的采樣效果。通過建立仿真對所提出的方法進行驗證,結果顯示
2018-07-31 10:24:36
步驟2、派單平臺通知最新騎手步驟3、派單平臺同時通知商家商品售賣出去步驟4、騎手到指定的商家獲取商品步驟5、騎手配送到客戶所在地這個派單場景中,要解決幾個棘手的技術:整合多種資源,計算資源會涉及到
2018-01-25 11:46:07
本文轉載自 OpenHarmony TSC 《峰會回顧第4期 | 異構計算場景下構建可信執行環境》
演講嘉賓 | 金意兒
回顧整理 | 廖濤
排版校對 | 李萍萍
嘉賓簡介
金意兒,華為可信計算
2023-08-15 17:35:09
求單軸雙輪自平衡車資料!
2013-04-26 10:07:10
求助 自平衡智能小車制作方案
2013-07-21 22:49:51
、智慧出行、運動健康五大場景下的創新體驗,基于新的HarmonyOS開發技術給開發者構筑更加高效便捷的開發平臺,并呈現了豐富的開發者活動。攜手打造面向高校的鴻蒙全場景開發與教學創新解決方案以國產化教學和信
2022-11-09 10:22:09
【深度學習基礎-17】非監督學習-Hierarchical clustering 層次聚類-python實現
2020-04-28 10:07:39
每一個要使用的琴弦是否符合外徑規格,單路測徑儀既可實現動態測量,也可實現靜態測量。 單路測徑儀采用進口光源、進口CCD、高數據測量系統、單片機等實現高質量的外徑尺寸檢測,測量精度高,可對0.1~10mm
2018-10-29 09:48:10
每一個要使用的琴弦是否符合外徑規格,單路測徑儀既可實現動態測量,也可實現靜態測量。 單路測徑儀采用進口光源、進口CCD、高數據測量系統、單片機等實現高質量的外徑尺寸檢測,測量精度高,可對0.1~10mm
2018-11-22 09:34:46
藍牙單芯片方案
2021-01-06 07:17:04
今天看了下DFS。里面主要對ramfs的使用場景比較疑惑。掉電就沒了的。那請教下大家都是用在什么場景下呢?
2022-09-26 14:24:58
嗨,我在邏輯中使用單端口RAM模塊,深度為208896,長度為12位。我想通過增加內存深度和字長來提高計算的精度。請讓我知道我的fpga的深度和寬度的兼容值。最大塊RAM存儲器的數據表是14,976 Kb。問候,Tanay
2019-10-31 10:21:53
請問一下什么是深度學習?
2021-08-30 07:35:21
求助大神,請問若想求采集的振動信號的自回歸模型估計(AR譜估計)來確定頻譜中譜峰出的中心頻率,該怎么編程???
2018-04-26 10:37:26
,Cgroup 支持我們對各個容器的 CPU、內存、網絡和磁盤 IO 帶寬資源進行隔離和限制,目前我們主要對容器的 CPU 資源進行調整,同時在測試中探索在時分復用的場景下動態調整 memory limit
2019-10-15 14:47:38
遠程視頻監控解決方案中動態IP技術的應用是什么?
2021-05-31 06:52:08
4- 2 自 適應選 擇相 應 CFAR 方案 。 本部分主 要仿 真二 維 多 策 略 恒 虛警檢測 算法在 均勻 雜波 、 多 目 標干擾 與 雜 波邊緣 背景下 的 性能 , 并 將 本方法
2018-02-28 09:19:59
參考 滑窗 內 采 樣值分 為兩類 , 具體實現步 驟如 下.SO - CFAR 算 法 ( 速度 維)為 了 避免雷達 目 標 檢測 在距離 維產生漏 警 現象, 本課題在檢測 單 元 的速度維采用
2018-03-29 10:53:32
在微觀交通仿真系統中,三維虛擬交通場景主要研究靜態物體的構建,對交通環境中各種動態因素研究較少。該文探討虛擬交通場景中虛擬汽車的視覺感知行為和決策行為,給出視
2009-04-06 08:47:50 10
10 背景建模一直是運動目標檢測中的一個重要課題。該文提出一個適用于動態背景的基于非參數估計的前景背景對比模型。模型通過核函數估計的方法模擬了像素點五維特征向量(彩色
2009-04-08 08:52:1818 基于單目深度估計的紅外圖像彩色化方法_戈曼
2017-03-17 10:13:010 針對場景標注中如何產生良好的內部視覺信息表達和有效利用上下文語義信息兩個至關重要的問題,提出一種基于深度學習的多尺度深度網絡監督模型。與傳統多尺度方法不同,模型主要由兩個深度卷積網絡組成:首先網絡
2017-11-28 14:22:100 為了解決動態參與介質場景連續幀的實時繪制問題,提出了一種基于光流場動態參與介質場景的繪制算法。首先,采用區域匹配的方法計算關鍵幀之間的光流場;然后,通過插值的方法計算中間幀之間的光流場,采用
2017-12-19 14:17:200 針對應用在機器人三維(3D)場景感知測量中,Kinect深度圖的聯合雙邊濾波(JBF)存在降低原始場景深度信息精確度的制約性問題,提出一種新的預處理算法。首先,通過構建深度圖的測量和采樣模型,得到
2017-12-25 16:58:020 中科院和英國倫敦大學瑪麗女王學院的研究人員就生成視頻摘要提出了一種新方法,采用無監督學習的方法,用深度摘要網絡(Deep Summarization Network,DSN)總結視頻。
2018-01-15 10:49:156753 
噪聲功率譜估計是語音增強算法的基本組成部分,傳統算法大多采用啟發式的估計方法,因而不能保證噪聲估計值的統計最優。提出了一種基于極大似然的非監督噪聲功率譜估計方法,采用隱馬爾可夫模型( Hidden
2018-03-07 10:14:371 本文將主要介紹深度學習模型在美團平臺推薦排序場景下的應用和探索。
2018-04-02 09:28:1220675 
英偉達近期在GAN相關研究和應用方面進展迅猛,在前一陣的成果展示中,通過利用生成對抗網絡(GAN)及無監督學習兩種深度學習技術,實現了場景間的四季轉換,通俗來說,就是去除路旁的積雪或是為干枯的樹木補齊樹葉,這一成果也被其利用在自動駕駛數據收集方面。
2018-05-16 15:55:002390 雙目匹配需要把左圖像素和右圖中其對應像素進行匹配,再由匹配的像素差算出左圖像素對應的深度,而之前的單目深度估計方法均不能顯式引入類似的幾何約束。由于深度學習模型的引入,雙目匹配算法的性能近年來得到了極大的提升。
2018-06-04 15:46:4934042 
給定一段視頻,我們用基于視覺的動作估計器預測每一幀演員的動作qt。該動作預測器是建立在人類網格復原這一工作之上的(akanazawa.github.io/hmr/),它用弱監督對抗的方法訓練動作估計
2018-10-12 09:06:292561 無需相機參數、單目、以無監督學習的方式從未標記場景視頻中搞定深度圖!
2019-04-29 15:38:452467 下圖展示了這種方法的主要流程,首先需要從圖像中抽取目標和對應的反射區域,而后對特征進行匹配,并基于這些信息進行水面法向量估計和和反射場景的輻射估計,最后進行立體匹配和深度計算;針對有波紋的水面,還需要對波浪進行一定的矯正和三維波浪形狀估計。
2019-08-02 14:54:533842 
深度學習DL是機器學習中一種基于對數據進行表征學習的方法。深度學習DL有監督和非監督之分,都已經得到廣泛的研究和應用。
2020-01-30 09:53:005546 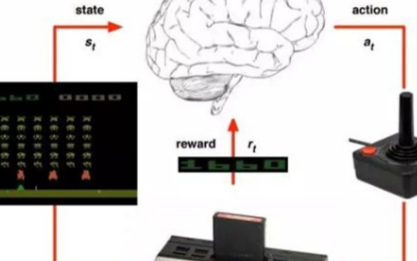
針對在傳統機器學習方法下單幅圖像深度估計效果差、深度值獲取不準確的問題,提出了一種基于多孔卷積神經網絡(ACNN)的深度估計模型。首先,利用卷積神經網絡(CNN)逐層提取原始圖像的特征圖;其次,利用
2020-09-29 16:20:005 在這項工作中,視頻中的3D姿態可以通過全卷積模型來估計,具體是在二維關鍵點上通過空洞時間卷積的模型得到3D姿態。我們還介紹了一種不...
2020-12-08 22:54:05651 為提高真實場景下頭部姿態估計的準確性,提出一種采用深度殘差網絡的頭部姿態估計方法。將深度殘差網絡 Restnetl01作為主干網絡,引入優化器提高深層卷積網絡訓練時的梯度穩定性,使用RGB圖像并采用
2021-03-16 11:27:448 同時定位與地圖構建(SLAM)作為機器人領域的硏究熱點,近年來取得了快速發展,但多數SLAM方法未考慮應用場景中的動態或可移動目標。針對該問題,提出一種適用于動態場景的SLAM方法。將基于深度學習
2021-03-18 10:39:3916 基于深度學習的二維人體姿態估計方法通過構建特定的神經網絡架構,將提取的特征信息根據相應的特征融合方法進行信息關聯處理,最終獲得人體姿態估計結果,因其具有廣泛的應用價值而受到研究人員的關注。從數據
2021-03-22 15:51:155 ,根據橋機計劃安排的配載任務,提出一種深度優先且動態深度多分支搜索的配載算法。在線下學習階段中通過歷史數據學習得到箱區狀態值函數,線上配載選箱時綜合值函數與各項約束條件通過動態深度分支搜索的方式得到最佳決策。
2021-03-31 15:22:356 為了提高利用深度神經網絡預測單圖像深度信息的精確度,提出了一種采用自監督卷積神經網絡進行單圖像深度估計的方法。首先,該方法通過在編解碼結構中引入殘差結構、密集連接結構和跳躍連接等方式改進了單圖像深度
2021-04-27 16:06:3513 近年來人體姿態估計作為計算機視覺領域的熱點,在視頻監控、人機交互、智慧校園等領域具有廣泛的應用前景。隨著神經網絡的快速發展,采用深度學習方法進行二維人體姿態估計,相較于傳統需要人工設定特征的方法
2021-04-27 16:16:077 注塑瓶表面缺陷檢測是注塑成型工芑流程中的重要環節,但生產中存在缺陷的注塑瓶樣夲數量相對匱乏,使得應用深度學習算法進行缺陷檢測時容易產生過擬合現象。針對上述問題,文中提出并構建一種半監督
2021-05-18 14:24:132 基于卷積神經網絡的遠程監督關系抽取方法提取的特征單一,且標準交叉熵損失函數未能較好處理數據集中正負樣本比例不均衡的情況。為此,提出一種基于深度殘差神經網絡的遠程監督關系抽取模型,通過改進交叉熵聚焦
2021-05-24 17:06:083 多點協作聯合傳輸場景中的半動態分簇方法
2021-06-24 14:25:3111 結合基擴展模型和深度學習的信道估計方法
2021-06-30 10:43:3962 車輛系統動態高級估計技術綜述
2021-07-18 09:19:210 ,基于深度學習的場景分割技術取得了突破性進展,與傳統場景分割算法相比獲得分割精度的大幅度提升.首先分析和描述場景分割問題面臨的3個主要難點:分割粒度細、尺度變化多樣、空間相關性強;其次著重介紹了目前
2022-02-12 11:28:52435 本文由深蘭科學院撰寫,文章將為大家細致講解一種有效的無監督深度表示器(Mix2Vec),該方法可將異構數據映射到統一的低維向量空間,避免混合異構數據相似度度量偏差問題。同時,該方法基于深度異構
2022-03-24 17:22:111270 目前,基于深度學習的視覺檢測在監督學習方法的幫助下取得了很大的成功。然而,在實際工業場景中,缺陷樣本的稀缺性、注釋成本以及缺陷先驗知識的缺乏可能會導致基于監督的方法失效。
2022-07-31 11:00:522303 作為最簡單直接且不需要點云標簽的三維場景重建方式,在這個工作中我們重點研究自監督環視深度估計這個任務。
2022-10-10 16:53:06816 隨著深度學習的興起,深度半監督學習算法也取得了長足的進步。同時,包括Google、Meta和微軟等在內的科技巨頭也認識到了半監督學習在實際場景中的巨大潛力。
2022-10-19 15:52:01452 自監督單目深度估計不需要地面實況訓練,近年來受到廣泛關注。設計輕量級但有效的模型非常有意義,這樣它們就可以部署在邊緣設備上。
2023-03-14 17:54:161500 單目深度估計分為兩個派系,metric depth estimation(度量深度估計,也稱絕對深度估計)和relative depth estimation(相對深度估計)。
2023-03-21 18:01:251754 本文討論常用的電源路徑管理方案,即動態電源路徑管理(DPPM)。DPPM控制回路可以根據輸入源的電流能力和負載電流水平動態調整充電電流,以實現給定電源和系統負載下的最短充電時間。有了DPPM,即使電池已深度放電,系統也可以在接入輸入源后立即獲得電力。另外,本文還討論了系統電壓的調節方法。
2023-07-12 15:18:39461 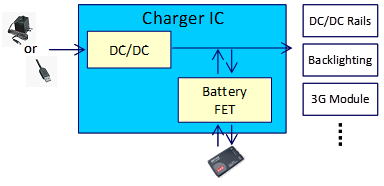
我們非常高興地發布一個新的代碼示例,展示虹科AI深度相機SDK的驚人功能。只需6行源代碼,您就可以實時準確地估計和跟蹤人體姿態!我們最新的代碼示例使用AI機器學習技術來識別和跟蹤人體的關鍵點,使您能
2023-07-31 17:42:26553 
了基于神經網絡的機器學習方法。 深度學習算法可以分為兩大類:監督學習和無監督學習。監督學習的基本任務是訓練模型去學習輸入數據的特征和其對應的標簽,然后用于新數據的預測。而無監督學習通常用于聚類、降維和生成模型等任務中
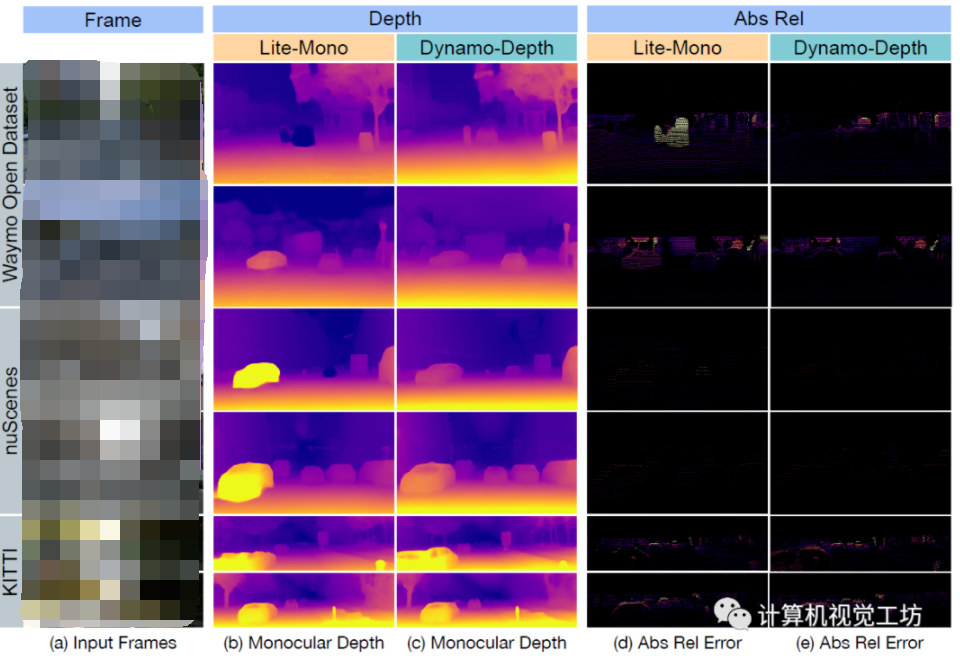
2023-08-17 16:11:26638 在這些情況下, 傳感器自帶的噪聲、無紋理的黑暗區域和反光等不利因素都違反了基于監督和自監督學習方法的訓練假設。自監督方法無法建立學習深度所需的像素的對應關系,而監督方法則可能從傳感器真值中(如上圖中的 LiDAR 與 nuScenes 的數據樣本)中學習到數據瑕疵。
2023-09-04 16:14:20334 
電子發燒友網站提供《Sentry ND網絡防御:實時無監督機器學習解決方案.pdf》資料免費下載
2023-09-13 10:19:210 操作域監督(ODS) 操作域監督功能模塊圖 操作域監督模塊監控與動態駕駛任務相關的能力、狀態和情況,目的是確保自動駕駛車輛在操作設計域及其他適用的動態和靜態約束下運行。它使用兩個操作域表示實現運行時
2023-10-04 18:19:00295 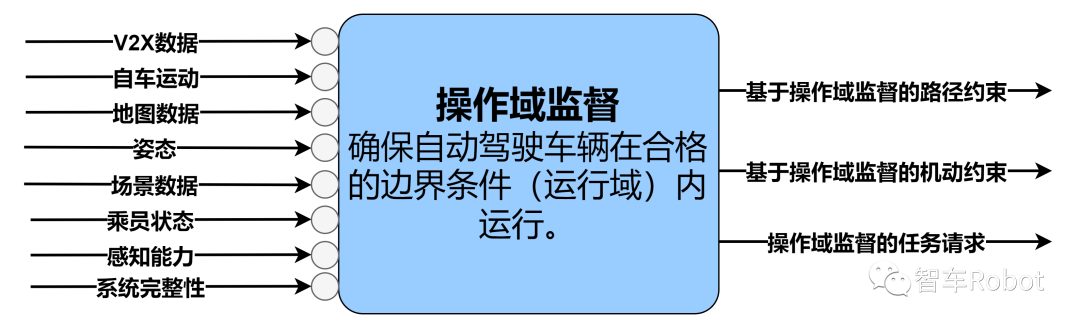
深度學習作為機器學習的一個分支,其學習方法可以分為監督學習和無監督學習。兩種方法都具有其獨特的學習模型:多層感知機 、卷積神經網絡等屬于監 督學習;深度置信網 、自動編碼器 、去噪自動編碼器 、稀疏編碼等屬于無監督學習。
2023-10-09 10:23:42303 
系統解決方案,同時在論壇現場深度講解了近期發布的全場景儲能系統解決方案,彰顯了天合儲能的領先技術及卓越的儲能產品解決方案,現場備受關注。
2023-11-05 16:42:19488 本文方法是一種自監督的單目深度估計框架,名為GasMono,專門設計用于室內場景。本方法通過應用多視圖幾何的方式解決了室內場景中幀間大旋轉和低紋理導致自監督深度估計困難的挑戰。
2023-11-06 11:47:08149 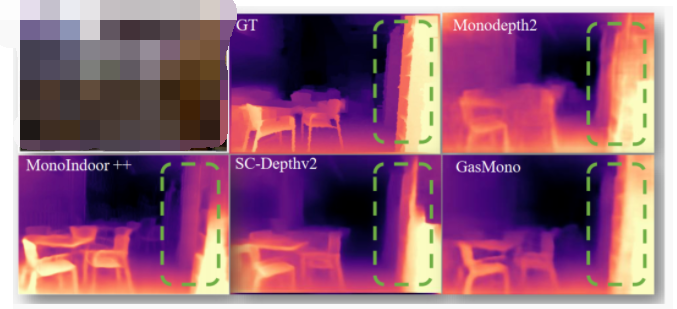
汽車必須接受全面的訓練、測試和驗證,以便能夠應對復雜的場景,而這需要大量涵蓋此類場景的數據。 在現實世界中,收集此類場景數據要耗費大量時間和成本。而現在,仿真提供了另一個可選方案。但要大規模生成復雜動態場景仍然
2023-12-16 16:05:01227 
可以看一下單目深度估計效果,這個深度圖的分辨率是真的高,物體邊界分割的非常干凈!這里也推薦工坊推出的新課程《單目深度估計方法:算法梳理與代碼實現》。
2023-12-17 10:01:16404 
 電子發燒友App
電子發燒友App










 工商網監
工商網監
評論