登錄
登錄后你可以
- 下載海量資料
- 學(xué)習(xí)在線(xiàn)課程
- 觀看技術(shù)視頻
- 寫(xiě)文章/發(fā)帖/加入社區(qū)
登錄
會(huì)員中心
創(chuàng)作中心
完善資料讓更多小伙伴認(rèn)識(shí)你,還能領(lǐng)取20積分哦,立即完善>
標(biāo)簽 > 數(shù)據(jù)集
文章:1143個(gè) 瀏覽:24858次 帖子:24個(gè)

以數(shù)據(jù)為中心的系統(tǒng)工程有哪些特點(diǎn)和作用?(2)
“從以數(shù)據(jù)為中心的角度來(lái)看,系統(tǒng)工程涉及正式應(yīng)用集成數(shù)據(jù)集來(lái)表示系統(tǒng)工程工作產(chǎn)品以及整個(gè)系統(tǒng)生命周期中生成的基礎(chǔ)數(shù)據(jù)和信息。”
2023-08-25 標(biāo)簽:數(shù)據(jù)中心數(shù)據(jù)庫(kù)數(shù)據(jù)集 606 0
除了提高性能之外,還能縮短提示時(shí)間,確保類(lèi)似性能。另外,微調(diào)目前僅支持處理4000 tokens,這也是此前微調(diào)型號(hào)的兩倍。16k tokens微調(diào)將于...
2023-08-24 標(biāo)簽:數(shù)據(jù)集OpenAI大模型 692 0
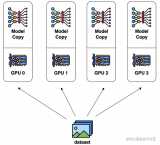
數(shù)據(jù)并行是最常見(jiàn)的并行形式,因?yàn)樗芎?jiǎn)單。在數(shù)據(jù)并行訓(xùn)練中,數(shù)據(jù)集被分割成幾個(gè)碎片,每個(gè)碎片被分配到一個(gè)設(shè)備上。這相當(dāng)于沿批次(Batch)維度對(duì)訓(xùn)練過(guò)...
2023-08-24 標(biāo)簽:模型數(shù)據(jù)集pytorch 1602 0

該指南使用的數(shù)據(jù)集是 Kaggle 競(jìng)賽 Sberbank 俄羅斯房地產(chǎn)價(jià)值預(yù)測(cè)競(jìng)賽數(shù)據(jù)(該項(xiàng)目的目標(biāo)是預(yù)測(cè)俄羅斯的房?jī)r(jià)波動(dòng))。本文并未使用全部數(shù)據(jù),僅...
2023-08-21 標(biāo)簽:數(shù)據(jù)處理機(jī)器學(xué)習(xí)python 430 0

LOG-LIO: 一種高效局部幾何信息估計(jì)的激光雷達(dá)慣性里程計(jì)方法
LOG-LIO的流程接收來(lái)自3D激光雷達(dá)和慣性測(cè)量單元(IMU)的輸入,如圖2所示。對(duì)于新的輸入掃描,我們首先使用Ring FALS來(lái)估計(jì)原始點(diǎn)的法線(xiàn),...
2023-08-18 標(biāo)簽:激光雷達(dá)數(shù)據(jù)集LIDAR 982 0
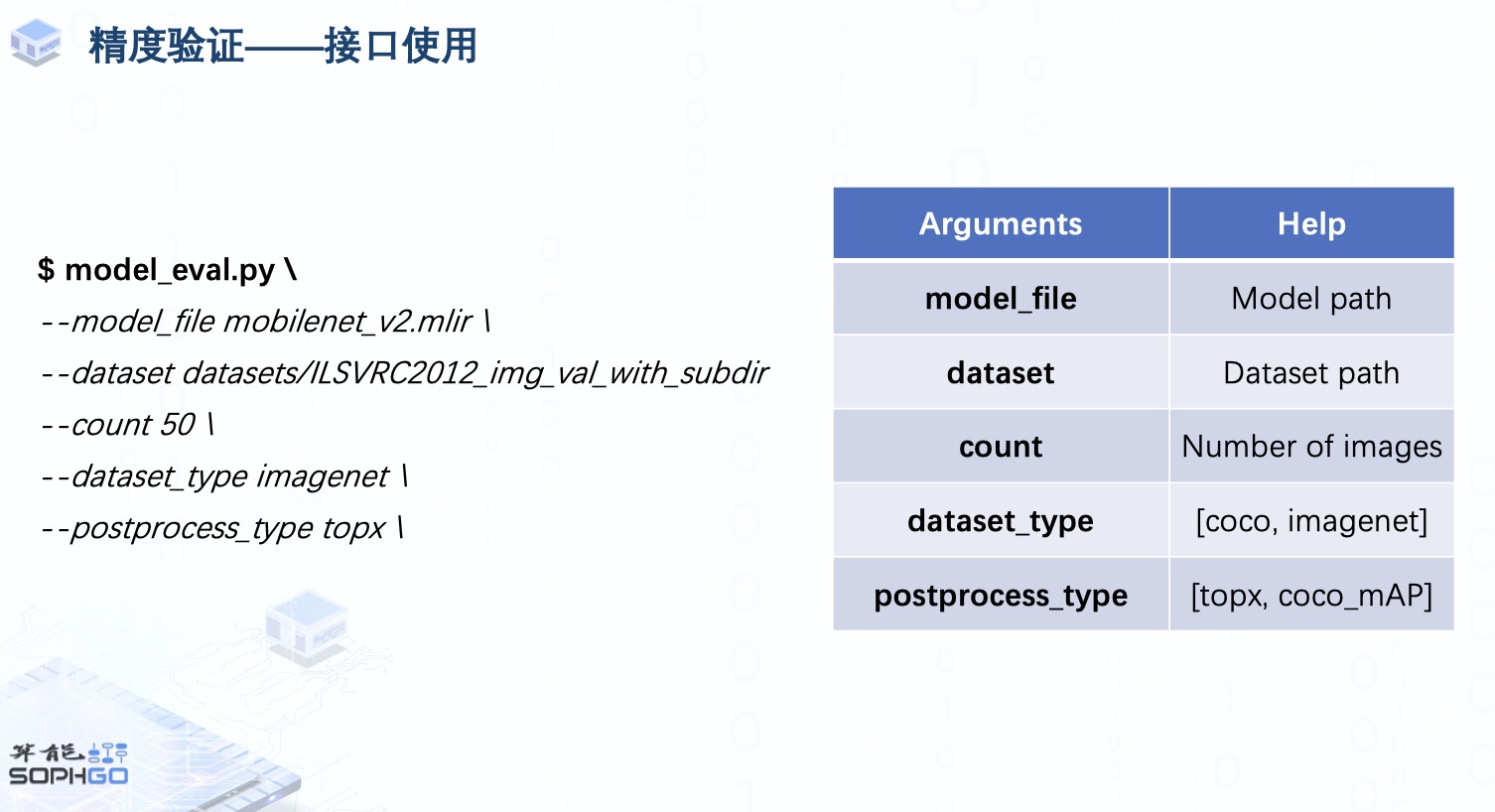
如何使用TPU-MLIR進(jìn)行模型轉(zhuǎn)換
TPU-MLIR之精度驗(yàn)證
2023-08-21 標(biāo)簽:網(wǎng)絡(luò)數(shù)據(jù)集模型轉(zhuǎn)換 800 0
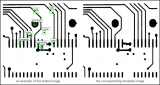
基于DeepPCB這個(gè)公開(kāi)數(shù)據(jù)集,總計(jì)有1500份的模板-缺陷圖像數(shù)據(jù)對(duì),總計(jì)圖像3000張,對(duì)應(yīng)text格式的1500個(gè)標(biāo)注文本描述文件。包含PCB主...
“目標(biāo)檢測(cè)是計(jì)算機(jī)視覺(jué)中最令人興奮和具有挑戰(zhàn)性的問(wèn)題之一,深度學(xué)習(xí)已經(jīng)成為解決該問(wèn)題的強(qiáng)大工具。”
2023-08-17 標(biāo)簽:計(jì)算機(jī)目標(biāo)檢測(cè)檢測(cè)模型 1779 0

最近的辦法主要是通過(guò)Outlier Exposure (OE) 將一個(gè)不相干的OoD數(shù)據(jù)集加入到ID數(shù)據(jù)集, 然后fine-tune已經(jīng)訓(xùn)練好的clos...
2023-08-15 標(biāo)簽:數(shù)據(jù)集分割器自動(dòng)駕駛 1065 0

改動(dòng)一行代碼,PyTorch訓(xùn)練三倍提速!這些技術(shù)是關(guān)鍵!
想要注意的是,模型和數(shù)據(jù)集的詳細(xì)信息并不是這里的主要關(guān)注點(diǎn)(它們只是為了盡可能簡(jiǎn)單,以便讀者可以在自己的機(jī)器上復(fù)現(xiàn),而不需要下載和安裝太多的依賴(lài))。所有...
2023-08-14 標(biāo)簽:數(shù)據(jù)集深度學(xué)習(xí)pytorch 777 0

遷移學(xué)習(xí)需要將預(yù)訓(xùn)練好的模型適應(yīng)新的下游任務(wù)。然而,作者觀察到,當(dāng)前的遷移學(xué)習(xí)方法通常無(wú)法關(guān)注與任務(wù)相關(guān)的特征。在這項(xiàng)工作中,作者探索了重新聚焦模型注意...
2023-08-11 標(biāo)簽:算法機(jī)器學(xué)習(xí)數(shù)據(jù)集 6476 0

I實(shí)驗(yàn) 總結(jié) 參考 前言 請(qǐng)?zhí)砑訄D片描述 我們這次要介紹的文章被接收在 ICCV 2023 上,題為:DreamTeacher: Pretraining...
2023-08-11 標(biāo)簽:圖像模型網(wǎng)絡(luò)設(shè)計(jì) 1297 0

該研究同時(shí)提出了一個(gè)全新任務(wù),圖像對(duì)比 VQA (difference VQA):給定兩張圖片,回答關(guān)于這兩張圖片差異性的問(wèn)題。在醫(yī)學(xué)領(lǐng)域,這個(gè)任務(wù)直接...
2023-08-09 標(biāo)簽:模型數(shù)據(jù)集大模型 555 0
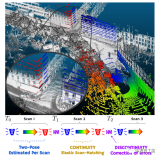
CT-ICP:實(shí)時(shí)彈性激光雷達(dá)里程計(jì)與回環(huán)檢測(cè)
通過(guò)在每一幀掃描的開(kāi)始和結(jié)束時(shí)刻聯(lián)合優(yōu)化兩個(gè)姿勢(shì),并根據(jù)時(shí)間戳進(jìn)行插值,使掃描進(jìn)行彈性變形以與地圖(白點(diǎn))對(duì)齊,從而創(chuàng)建連續(xù)時(shí)間掃描到地圖的里程計(jì)。圖片...
2023-08-02 標(biāo)簽:SLAM激光雷達(dá)數(shù)據(jù)集 1250 0

我們剛剛申請(qǐng)了一個(gè)名叫Info的結(jié)構(gòu)體類(lèi)型,那么理論上我們可以像聲明其他變量的操作一樣,去聲明我們的結(jié)構(gòu)體操作,但是C語(yǔ)言中規(guī)定,聲明結(jié)構(gòu)體變量的時(shí)候,...
2023-08-01 標(biāo)簽:C語(yǔ)言編譯器數(shù)據(jù)集 661 0

Wayve:從源頭講起,如何實(shí)現(xiàn)以對(duì)象為中心的自監(jiān)督感知方法?
傳統(tǒng)上,以對(duì)象中心的表示是通過(guò)訓(xùn)練監(jiān)督對(duì)象檢測(cè)模型,并從中提取對(duì)象屬性(如位置和速度)來(lái)實(shí)現(xiàn)的。這種方法有兩大缺點(diǎn)。首先,它需要與檢測(cè)對(duì)象相匹配的帶標(biāo)簽...
2023-07-29 標(biāo)簽:編碼器算法數(shù)據(jù)集 707 0

基于PoseDiffusion相機(jī)姿態(tài)估計(jì)方法
介紹 一般意義上,相機(jī)姿態(tài)估計(jì)通常依賴(lài)于如手工的特征檢測(cè)匹配、RANSAC和束調(diào)整(BA)。在本文中,作者提出了PoseDiffusion,這是一種新穎...
2023-07-23 標(biāo)簽:相機(jī)模型數(shù)據(jù)集 1469 0
Meta用頭顯實(shí)現(xiàn)全身動(dòng)作追蹤!沒(méi)有腿部信息,也可準(zhǔn)確估計(jì)姿態(tài)
由首爾大學(xué)(SNU)和Meta Reality Labs Research的研究人員共同完成的這項(xiàng)工作,通過(guò)強(qiáng)化學(xué)習(xí)展示了如果將傳感器與物理模擬和環(huán)境觀...
2023-07-19 標(biāo)簽:傳感器神經(jīng)網(wǎng)絡(luò)數(shù)據(jù)集 638 0

APE:對(duì)CLIP進(jìn)行特征提純能夠提升Few-shot性能
CLIP是一個(gè)通用的模型,考慮到下游數(shù)據(jù)分布的差異,對(duì)某個(gè)下游任務(wù)來(lái)說(shuō),CLIP提取的特征并不全是有用的,可能包含一部分冗余或噪聲。因此,在這篇文章中,...
2023-07-19 標(biāo)簽:模型數(shù)據(jù)集Clip 1843 0

南開(kāi)大學(xué)提出LSKNet:遙感旋轉(zhuǎn)目標(biāo)檢測(cè)新SOTA!
如圖1(a)所示,遙感圖像中的物體檢測(cè)器所使用的有限范圍的背景往往會(huì)導(dǎo)致錯(cuò)誤的分類(lèi)。例如,在上層圖像中,由于其典型特征,檢測(cè)器可能將T子路口歸類(lèi)為十字路...
 換一批
換一批
編輯推薦廠(chǎng)商產(chǎn)品技術(shù)軟件/工具OS/語(yǔ)言教程專(zhuān)題
| 電機(jī)控制 | DSP | 氮化鎵 | 功率放大器 | ChatGPT | 自動(dòng)駕駛 | TI | 瑞薩電子 |
| BLDC | PLC | 碳化硅 | 二極管 | OpenAI | 元宇宙 | 安森美 | ADI |
| 無(wú)刷電機(jī) | FOC | IGBT | 逆變器 | 文心一言 | 5G | 英飛凌 | 羅姆 |
| 直流電機(jī) | PID | MOSFET | 傳感器 | 人工智能 | 物聯(lián)網(wǎng) | NXP | 賽靈思 |
| 步進(jìn)電機(jī) | SPWM | 充電樁 | IPM | 機(jī)器視覺(jué) | 無(wú)人機(jī) | 三菱電機(jī) | ST |
| 伺服電機(jī) | SVPWM | 光伏發(fā)電 | UPS | AR | 智能電網(wǎng) | 國(guó)民技術(shù) | Microchip |
| Arduino | BeagleBone | 樹(shù)莓派 | STM32 | MSP430 | EFM32 | ARM mbed | EDA |
| 示波器 | LPC | imx8 | PSoC | Altium Designer | Allegro | Mentor | Pads |
| OrCAD | Cadence | AutoCAD | 華秋DFM | Keil | MATLAB | MPLAB | Quartus |
| C++ | Java | Python | JavaScript | node.js | RISC-V | verilog | Tensorflow |
| Android | iOS | linux | RTOS | FreeRTOS | LiteOS | RT-THread | uCOS |
| DuerOS | Brillo | Windows11 | HarmonyOS |
關(guān)注我們的微信

下載發(fā)燒友APP

電子發(fā)燒友觀察

版權(quán)所有 ? 湖南華秋數(shù)字科技有限公司
長(zhǎng)沙市望城經(jīng)濟(jì)技術(shù)開(kāi)發(fā)區(qū)航空路6號(hào)手機(jī)智能終端產(chǎn)業(yè)園2號(hào)廠(chǎng)房3層(0731-88081133)
電子發(fā)燒友 (電路圖) 湘公網(wǎng)安備43011202000918 工商網(wǎng)監(jiān)
湘ICP備2023018690號(hào)-1
工商網(wǎng)監(jiān)
湘ICP備2023018690號(hào)-1

