完善資料讓更多小伙伴認識你,還能領取20積分哦,立即完善>
標簽 > 編碼器
編碼器(encoder)是將信號(如比特流)或數據進行編制、轉換為可用以通訊、傳輸和存儲的信號形式的設備。編碼器把角位移或直線位移轉換成電信號,前者稱為碼盤,后者稱為碼尺。按照讀出方式編碼器可以分為接觸式和非接觸式兩種;按照工作原理編碼器可分為增量式和絕對式兩類。
文章:2266個 瀏覽:137289次 帖子:1119個
本文主要介紹了74ls148可以用什么芯片代替?74LS148是8線-3線優先編碼器,共有54/74148和54/74LS148兩種線路結構型式,將8條...
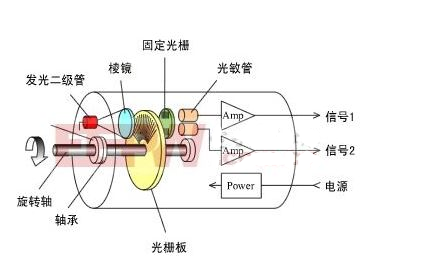
光電編碼器,是一種通過光電轉換將輸出軸上的機械幾何位移量轉換成脈沖或數字量的傳感器。這是目前應用最多的傳感器,光電編碼器是由光柵盤和光電檢測裝置組成。光...
用數字信號完成對數字量進行邏輯運算和算術運算的電路稱為數字電路。由于它具有邏輯運算和邏輯處理功能,所以又稱為數字邏輯電路。
減速機是通過機械傳動裝置來降低電機(馬達)轉速,而變頻器是通過改變交流電頻率以達到電機(馬達)速度調節的目的。通過變頻器降低電機轉速時,可以達到節能的目的。
它基于谷歌2017年發布的Transformer架構,通常的Transformer使用一組編碼器和解碼器網絡,而BERT只需要一個額外的輸出層,對預訓練...
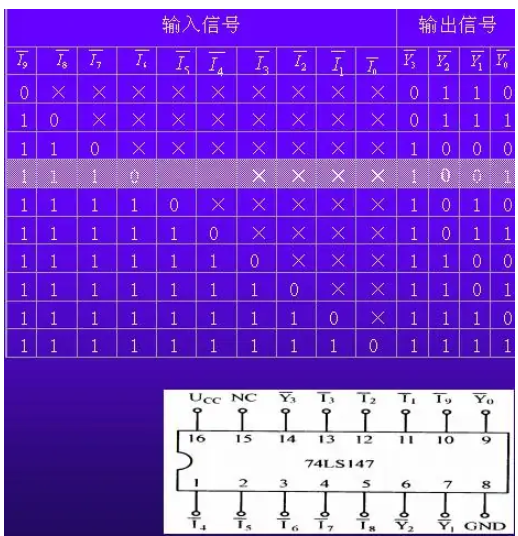
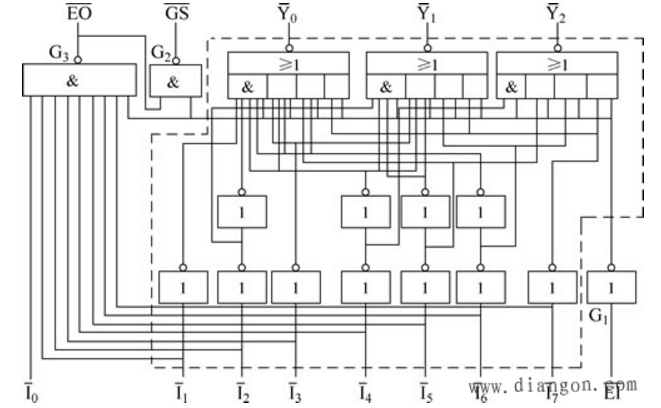
74LS147優先編碼器的輸入端和輸出端都是低電平有效,即當某一個輸入端低電平0時,4個輸出端就以低電平0的輸出其對應的8421 BCD編碼。
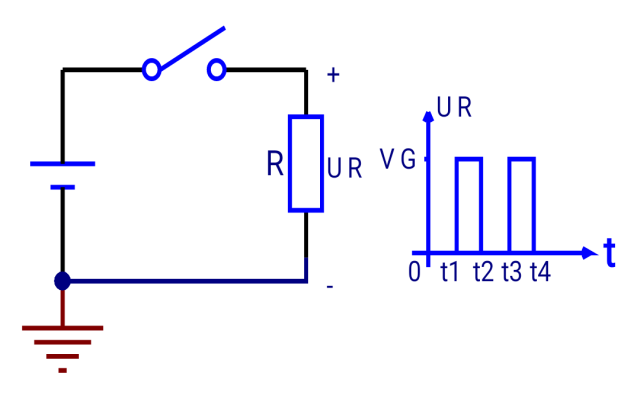
編碼器是一種將旋轉位移轉換成一串數字脈沖信號的旋轉式傳感器,這些脈沖能用來控制角位移,如果編碼器與齒輪條或螺旋絲杠結合在一起,也可用于測量直線位移。

對處于不同 FPN 層級的特征進行訓練,并將其作為共享“探測頭(detection head)”的輸入。然而,由于分辨率在不同層級上會發生改變,每層上的...

在前面的教程中,我們已經看到了什么是電容和電荷?在本教程中,我們將學習如何讀取電容器值?對于某些應用,有必要知道電容器的容差和電壓值以及電容。所有這些參...
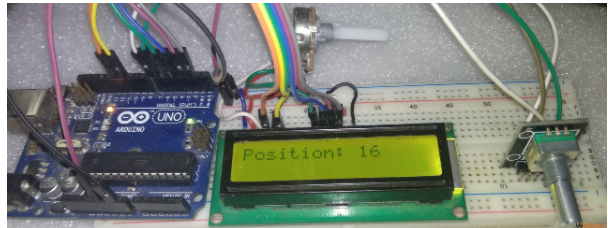
在本篇文章中,我們將學習如何在Arduino開發板上使用旋轉編碼器。我們將以帶符號的數字同時顯示順時針和逆時針方向的編碼值。 所需的組件 ● Ardui...
DD馬達和伺服電機是兩種常見的電機類型,它們在許多方面都有所不同。下面將詳細介紹它們的區別。 一、定義和結構 DD馬達,全稱為DD馬達驅動器,是一種通過...

基于Verilog HDL的一種絕對值編碼器實時讀出算法案例詳解
光電編碼器是通過光電轉換將輸出軸上的機械幾何位移量轉換成一串脈沖或數字量的傳感器。在電機伺服控制系統中,它與電機同軸連接,常用來測量電機轉子的速度和位置...
2018-01-12 標簽:編碼器 8431 0
編碼器是一個機械與電子緊密結合的精密測量器件。它通過光電或電磁原理將一個機械的幾何位移量轉換為電子信號(電子脈沖或數據串)。這種電子信號通常需要連接到控...
一直以來編碼器用戶都不愿意改變,因為一些聲稱可提供卓越性能和可靠性的創新電機控制技術,必須擁有出色的紀錄和往績來作為支持,才可以用于工作場地或工業裝置。...
首先在增量式編碼器安裝設備之前需要的是要對周邊環境做一個系統的清潔,設備周圍的環境都需注意做好相對應的清潔措施。這樣可以更好保證編碼器的工作運行。常用的...
不是所有的變頻器都可以用編碼器來實現定位控制的。只有高矢量控制的變頻器或配置有PG卡的,能夠接受高頻脈沖的變頻器才能夠實現這種功能。

在模擬電路中信號都是連續的,并且在任意一個位置都有與之相對于的值,比如正弦波,三角波,鋸齒波,各種噪音等信號。
最近幾年國內市場小型伺服電機發展迅猛,現有伺服電機市場更多的關注在體積小而薄,分辨率高而價格低的編碼器上,對于“絕對值編碼器”的理解,也是僅停留在能“停...

認識CAN 總線錯誤的第一步就是了解認識CAN 總線協議和它的具體功能,這樣才能更容易地理解CAN 總線是如何去發現并解決錯誤的。
 換一批
換一批
編輯推薦廠商產品技術軟件/工具OS/語言教程專題
| 電機控制 | DSP | 氮化鎵 | 功率放大器 | ChatGPT | 自動駕駛 | TI | 瑞薩電子 |
| BLDC | PLC | 碳化硅 | 二極管 | OpenAI | 元宇宙 | 安森美 | ADI |
| 無刷電機 | FOC | IGBT | 逆變器 | 文心一言 | 5G | 英飛凌 | 羅姆 |
| 直流電機 | PID | MOSFET | 傳感器 | 人工智能 | 物聯網 | NXP | 賽靈思 |
| 步進電機 | SPWM | 充電樁 | IPM | 機器視覺 | 無人機 | 三菱電機 | ST |
| 伺服電機 | SVPWM | 光伏發電 | UPS | AR | 智能電網 | 國民技術 | Microchip |
| 開關電源 | 步進電機 | 無線充電 | LabVIEW | EMC | PLC | OLED | 單片機 |
| 5G | m2m | DSP | MCU | ASIC | CPU | ROM | DRAM |
| NB-IoT | LoRa | Zigbee | NFC | 藍牙 | RFID | Wi-Fi | SIGFOX |
| Type-C | USB | 以太網 | 仿真器 | RISC | RAM | 寄存器 | GPU |
| 語音識別 | 萬用表 | CPLD | 耦合 | 電路仿真 | 電容濾波 | 保護電路 | 看門狗 |
| CAN | CSI | DSI | DVI | Ethernet | HDMI | I2C | RS-485 |
| SDI | nas | DMA | HomeKit | 閾值電壓 | UART | 機器學習 | TensorFlow |
| Arduino | BeagleBone | 樹莓派 | STM32 | MSP430 | EFM32 | ARM mbed | EDA |
| 示波器 | LPC | imx8 | PSoC | Altium Designer | Allegro | Mentor | Pads |
| OrCAD | Cadence | AutoCAD | 華秋DFM | Keil | MATLAB | MPLAB | Quartus |
| C++ | Java | Python | JavaScript | node.js | RISC-V | verilog | Tensorflow |
| Android | iOS | linux | RTOS | FreeRTOS | LiteOS | RT-THread | uCOS |
| DuerOS | Brillo | Windows11 | HarmonyOS |
關注我們的微信

下載發燒友APP

電子發燒友觀察

版權所有 ? 湖南華秋數字科技有限公司
長沙市望城經濟技術開發區航空路6號手機智能終端產業園2號廠房3層(0731-88081133)
電子發燒友 (電路圖) 湘公網安備43011202000918 工商網監
湘ICP備2023018690號-1
工商網監
湘ICP備2023018690號-1