完善資料讓更多小伙伴認識你,還能領取20積分哦,立即完善>
標簽 > pid控制
當今的閉環自動控制技術都是基于反饋的概念以減少不確定性。反饋理論的要素包括三個部分:測量、比較和執行。測量關鍵的是被控變量的實際值,與期望值相比較,用這個偏差來糾正系統的響應,執行調節控制。
文章:170個 瀏覽:41032次 帖子:112個
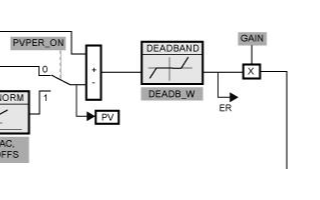
功 能:FB58 “TCONT_CP“ 針對溫度控制過程而設計(也可應用于其他控制過程),可實現連續調節及比例調節元件的兩級調節。
在現代工業自動化和過程控制中,PID控制器是最為常見和有效的控制策略之一。它通過比例(P)、積分(I)和微分(D)三個基本控制作用的組合,實現了對系統動...
一般PLC系統的圖紙包含柜內圖紙和柜外圖紙兩部分;柜內圖紙指柜子內部的接線圖;柜外圖紙是所有接出電氣柜的接線圖。
變頻器的設定參數較多,每個參數均有一定的選擇范圍,使用中常常遇到因個別參數設置不當,導致變頻器不能正常工作的現象,因此,必須對相關的參數進行正確的設定。...
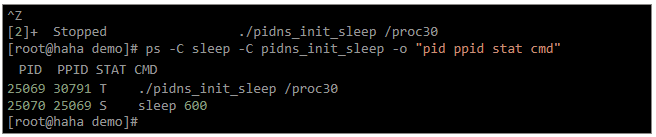
如何組織PID命名空間的各種ID?PID命名空間基本概念簡析
命名空間 API 由三個系統調用(clone()、unshare()和setns())以及許多/proc文件組成。CLONE_NEW* 常量包括
Ftrace是Linux Kernel的官方tracing系統,支持Function trace、靜態tracepoint、動態Tracepoint的跟...
變頻器的設定參數較多,每個參數均有一定的選擇范圍,使用中常常遇到因個別參數設置不當,導致變頻器不能正常工作的現象,因此,必須對相關的參數進行正確的設定。
通常是針對模擬量的控制來說,一個控制器根據一個輸入量,按照一定的規則和算法來決定一個輸出量,這樣,輸入和輸出就形成一個控制回路。
很多電氣的新手在做完電氣控制柜以及plc程序等設計環節后,不清楚調試應如何開始,或者一些人因為不適當的調試方法導致了PLC燒毀等等問題,那么設計完的電氣...
usb協議雖然比較復雜,但是單片機的usb接口幫我們做了很多工作,大大簡化了軟件編程人員的工作量,比如usb數據包中的SYNC PID CRC等內容都是...

對比開環控制與閉環控制,開環控制是有明確的物理關系的,這個加速度大小與施加的時間符合運動學規律。但是閉環控制并沒有這樣的物理等式(但是具備物理關系),速...
通過模擬量的輸入或脈沖的頻率都可以進行轉動速度的控制,在有上位控制裝置的外環PID控制時速度模式也可以進行定位,但必須把電機的位置信號或直接負載的位置信...
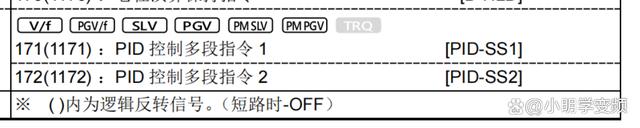
案例:某客戶需求,變頻器控制泵,第一段壓力10Mpa,經過若干時間后,壓力需要在15Mpa,再經過一段時間需要以最大的20Mpa輸出,而且3段都需要用P...
串級控制系統副回路不常選用PID控制的原因,主要基于以下幾個方面: 1. 控制要求差異 串級控制系統的主要目的是為了高精度地穩定主變量,對主變量的控制要...
在實際設計ACC系統時就需要考慮實際的工況因素,考慮車輛切入與切出的實際交通情況以及車輛運動軌跡的預測和動態速度設置問題,來設計ACC系統,實現自動駕駛...
加減速時間指加速時間和減速時間。加速時間就是輸出頻率從0上升到最大頻率所需時間;減速時間是指從最大頻率下降到0所需時間。通常用頻率設定信號上升、下降來確...
要對進程進行監測和控制,首先必須要了解當前進程的情況,也就是需要查看當前進程,ps命令就是最基本進程查看命令。
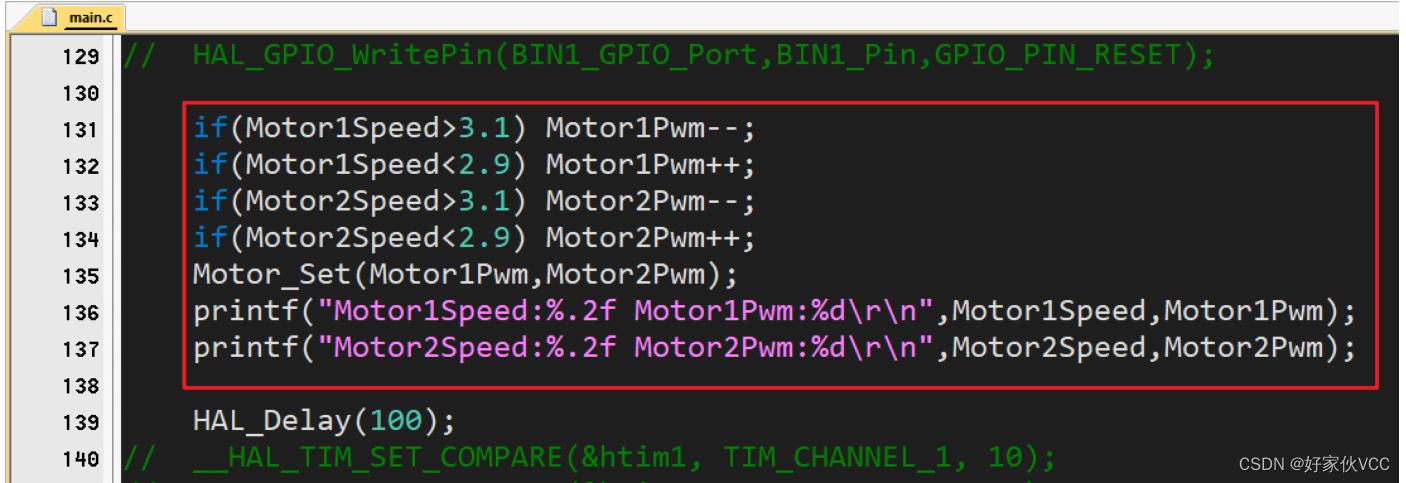
第八章-PID 速度控制 PID控制 PID調參 PID溫度控制
第八章-PID 速度控制 PID控制 PID調參 PID溫度控制 藍橋杯 單片機 串級PID 模糊PID STM32f103c8t6最小系統板 STM3...
電壓輸出型變送器具有恒壓源特性,輸入阻抗很高。如果變送器距離PLC較遠,通過線路間的分布電容和分布電感產生的干擾信號電流,在模塊的輸入阻抗上將產生較高的...
 換一批
換一批
編輯推薦廠商產品技術軟件/工具OS/語言教程專題
| 電機控制 | DSP | 氮化鎵 | 功率放大器 | ChatGPT | 自動駕駛 | TI | 瑞薩電子 |
| BLDC | PLC | 碳化硅 | 二極管 | OpenAI | 元宇宙 | 安森美 | ADI |
| 無刷電機 | FOC | IGBT | 逆變器 | 文心一言 | 5G | 英飛凌 | 羅姆 |
| 直流電機 | PID | MOSFET | 傳感器 | 人工智能 | 物聯網 | NXP | 賽靈思 |
| 步進電機 | SPWM | 充電樁 | IPM | 機器視覺 | 無人機 | 三菱電機 | ST |
| 伺服電機 | SVPWM | 光伏發電 | UPS | AR | 智能電網 | 國民技術 | Microchip |
| 開關電源 | 步進電機 | 無線充電 | LabVIEW | EMC | PLC | OLED | 單片機 |
| 5G | m2m | DSP | MCU | ASIC | CPU | ROM | DRAM |
| NB-IoT | LoRa | Zigbee | NFC | 藍牙 | RFID | Wi-Fi | SIGFOX |
| Type-C | USB | 以太網 | 仿真器 | RISC | RAM | 寄存器 | GPU |
| 語音識別 | 萬用表 | CPLD | 耦合 | 電路仿真 | 電容濾波 | 保護電路 | 看門狗 |
| CAN | CSI | DSI | DVI | Ethernet | HDMI | I2C | RS-485 |
| SDI | nas | DMA | HomeKit | 閾值電壓 | UART | 機器學習 | TensorFlow |
| Arduino | BeagleBone | 樹莓派 | STM32 | MSP430 | EFM32 | ARM mbed | EDA |
| 示波器 | LPC | imx8 | PSoC | Altium Designer | Allegro | Mentor | Pads |
| OrCAD | Cadence | AutoCAD | 華秋DFM | Keil | MATLAB | MPLAB | Quartus |
| C++ | Java | Python | JavaScript | node.js | RISC-V | verilog | Tensorflow |
| Android | iOS | linux | RTOS | FreeRTOS | LiteOS | RT-THread | uCOS |
| DuerOS | Brillo | Windows11 | HarmonyOS |
關注我們的微信

下載發燒友APP

電子發燒友觀察

版權所有 ? 湖南華秋數字科技有限公司
長沙市望城經濟技術開發區航空路6號手機智能終端產業園2號廠房3層(0731-88081133)
電子發燒友 (電路圖) 湘公網安備43011202000918 工商網監
湘ICP備2023018690號-1
工商網監
湘ICP備2023018690號-1


