步進(jìn)電機(jī)是將電脈沖信號(hào)轉(zhuǎn)變?yōu)榻?b class="flag-6" style="color: red">位移或線位移的開(kāi)環(huán)控制電機(jī),輸入脈沖總數(shù)控制步進(jìn)電機(jī)的總旋轉(zhuǎn)角度,電機(jī)的速度由每秒輸入脈沖數(shù)目所決定,因此易實(shí)現(xiàn)機(jī)械位置的精準(zhǔn)控制。而且由于步進(jìn)電機(jī)價(jià)格低廉、可控性
2015-06-11 13:47:16 4768
4768 
在實(shí)際的控制系統(tǒng)中,線性系統(tǒng)畢竟是少數(shù),大部分的系統(tǒng)屬于非線性系統(tǒng),或者說(shuō)是系統(tǒng)模型不確定的系統(tǒng),如果控制精度要求較高的話,那么對(duì)于參數(shù)的整定過(guò)程是有難度的。專家 PID 和模糊 PID 就是為滿足
2021-07-19 06:29:49
有關(guān)于模糊PID控制算法的學(xué)習(xí)資料嗎
2017-03-29 15:49:07
怎么使用模糊Pid控制四相五線的步進(jìn)電機(jī)呀
2020-05-20 23:36:59
勻速升溫控制是個(gè)復(fù)雜的過(guò)程,具有大慣性、純滯后、非線性等特點(diǎn),難以得到精確的數(shù)學(xué)模型。考慮到這些特點(diǎn),為提高控制精度,本設(shè)計(jì)將Fuzzy PID算法應(yīng)用于電阻爐溫度控制系統(tǒng),當(dāng)誤差較大時(shí)采用模糊控制
2019-05-30 10:38:57
現(xiàn)在想實(shí)現(xiàn)步進(jìn)電機(jī)的位置和速度控制,通過(guò)串行PID控制,有沒(méi)有那個(gè)大神給講解一下,外環(huán)的位置怎么控制內(nèi)環(huán)的速度,有例程就更好了,謝謝!
2017-03-21 14:38:36
步進(jìn)電機(jī)控制(PLC)目錄1、系統(tǒng)控制要求... 2一、控制要求... 2二、說(shuō)明... 2三、三相六拍步進(jìn)電機(jī)簡(jiǎn)介... 32、設(shè)計(jì)方案及流程圖... 4一、設(shè)計(jì)基礎(chǔ)... 4二、設(shè)計(jì)方案
2021-06-28 09:46:48
,電機(jī)速度PID控制的結(jié)構(gòu)圖如下,目標(biāo)值是設(shè)定的速度,通過(guò)編碼器獲取電機(jī)的轉(zhuǎn)速作為反饋,實(shí)現(xiàn)電機(jī)轉(zhuǎn)速的控制。再來(lái)看電機(jī)位置PID控制,其結(jié)構(gòu)圖如下,目標(biāo)值是設(shè)定的位置,通過(guò)編碼器獲取電機(jī)累計(jì)轉(zhuǎn)動(dòng)的脈沖數(shù)作為反饋,實(shí)現(xiàn)電機(jī)位置的控制。所以:對(duì)比兩張圖,速度控制與位置控制的主要區(qū)別,就是控制量的不同。
2021-06-29 07:39:25
設(shè)定值和過(guò)程變量都是采集到的電壓值,而PID的輸出是這兩個(gè)值偏差的函數(shù),請(qǐng)問(wèn)我應(yīng)該對(duì)PID的輸出做怎么的處理才能去控制步進(jìn)電機(jī)的速度以及方向,從而去消除電壓的誤差?
2014-10-18 14:23:23
有誰(shuí)知道怎么將模糊控制和pid連接在一起呢?最好有相關(guān)的程序vi文件借鑒參考。不要調(diào)用控件
2020-03-12 19:13:40
那些在運(yùn)行過(guò)程中移動(dòng)距離和速度均確定的具體設(shè)備,小編認(rèn)為采用PLC通過(guò)步進(jìn)電機(jī)驅(qū)動(dòng)器來(lái)控制步進(jìn)電機(jī)的運(yùn)轉(zhuǎn)是一種理想的技術(shù)方案。步進(jìn)電機(jī)的特點(diǎn):(1)步進(jìn)電機(jī)的角位移與輸入脈沖數(shù)嚴(yán)格...
2021-06-29 06:53:19
基于FPGA的步進(jìn)電機(jī)細(xì)分驅(qū)動(dòng)控制設(shè)計(jì)一、基本要求:在理解步進(jìn)電機(jī)的工作原理以及細(xì)分原理的基礎(chǔ)上,利用FPGA實(shí)現(xiàn)四相步進(jìn)電機(jī)的8細(xì)分驅(qū)動(dòng)控制。二、評(píng)分標(biāo)準(zhǔn):1、設(shè)計(jì)方案介紹 (共15分)要求:詳細(xì)
2013-06-14 22:03:43
(k-2)] 。通過(guò)步進(jìn)電機(jī)控制流量調(diào)節(jié)閥 ,每次調(diào)節(jié)后,輸出的步進(jìn)電機(jī)要?jiǎng)幼鞯?b class="flag-6" style="color: red">位移增量。那么,我的疑惑在于,應(yīng)該輸出 還是△u(k)?書(shū)上好多地方都說(shuō)應(yīng)該輸出△u(k)。但是我無(wú)法理解,如果輸出△u(k
2015-09-02 10:18:14
步進(jìn)電機(jī)是將電脈沖信號(hào)轉(zhuǎn)變?yōu)榻?b class="flag-6" style="color: red">位移或線位移的開(kāi)環(huán)控制電機(jī),輸入脈沖總數(shù)控制步進(jìn)電機(jī)的總旋轉(zhuǎn)角度,電機(jī)的速度由每秒輸入脈沖數(shù)目所決定,因此易實(shí)現(xiàn)機(jī)械位置的精準(zhǔn)控制。
2019-10-24 08:08:21
新人一枚,希望大家能發(fā)個(gè)關(guān)于 基于LabVIEW的步進(jìn)電機(jī)PID速度控制器 的文章,謝謝了!!!!
2015-04-20 20:34:47
基于Stm32f103的位移測(cè)量及控制系統(tǒng)設(shè)計(jì)系統(tǒng)框架本設(shè)計(jì)采用單片機(jī)控制步進(jìn)電機(jī)實(shí)現(xiàn)位移的精準(zhǔn)控制,用位移傳感器實(shí)時(shí)采集位移數(shù)據(jù),用PID的控制算法,與步進(jìn)電機(jī)的控制形成一套閉環(huán)的控制系統(tǒng)。重點(diǎn)
2021-08-23 08:25:42
基于基于虛擬儀器的直流電機(jī)模糊PID控制實(shí)驗(yàn)研究
2016-05-21 16:47:23
該樓層疑似違規(guī)已被系統(tǒng)折疊隱藏此樓查看此樓模型跟新了下電機(jī)控制類開(kāi)關(guān)磁阻電機(jī)控制電機(jī)本體模型轉(zhuǎn)速閉環(huán)位置閉環(huán)(魯棒和PID兩種)模糊PID速度控制直線開(kāi)關(guān)磁阻電機(jī)位置速度雙閉環(huán)控制兩相混合步進(jìn)電機(jī)
2021-07-06 08:00:51
怎么才能實(shí)現(xiàn)高精度的步進(jìn)電機(jī)位置控制
2023-10-13 07:40:50
拓達(dá)伺服步進(jìn)電機(jī)是步進(jìn)電機(jī)的位置閉環(huán)控制,那不用說(shuō)了一定是位置環(huán),控制量是長(zhǎng)度(位移)。這是因?yàn)槲恢?b class="flag-6" style="color: red">控制的閉環(huán)控制策略可以大致根據(jù)控制量分三種:1.位置環(huán),就是用位移量來(lái)做閉環(huán)控制。2.速度環(huán),就是
2018-08-25 10:05:53
磁阻電機(jī)位置速度雙閉環(huán)控制兩相混合步進(jìn)電機(jī)轉(zhuǎn)速/角度閉環(huán)控制普通PID控制模糊PID控制電機(jī)本體建模電機(jī)失步仿真永磁無(wú)刷直流電機(jī)控制系統(tǒng):電機(jī)抗飽和微分跟隨器神經(jīng)網(wǎng)絡(luò)PID控制速度閉環(huán)控制模糊控制(變...
2021-07-12 06:00:52
無(wú)刷直流電機(jī)的模糊PID控制 無(wú)刷直流電機(jī)的轉(zhuǎn)速控制系統(tǒng)如下圖,圖中有速度環(huán)和電流環(huán)。 然后給出在Simulink中與之相對(duì)應(yīng)的速度電流雙閉環(huán)調(diào)速系統(tǒng)結(jié)構(gòu)圖圖中WASR和WACR分別為速度控制
2016-02-01 10:25:56
求大佬告知呀,模糊pid方式控制四相五線步進(jìn)電機(jī)呀
2020-05-20 22:27:24
氣動(dòng)柔性球關(guān)節(jié)的模糊PID控制介紹了新型氣動(dòng)柔性球關(guān)節(jié),討論研究其控制方法。綜合模糊控制和PID 控制的特點(diǎn),設(shè)計(jì)針對(duì)氣動(dòng)柔性球關(guān)節(jié)的模糊PID 控制器,實(shí)現(xiàn)對(duì)球關(guān)節(jié)彎曲角度、偏轉(zhuǎn)方向等系統(tǒng)參數(shù)
2009-08-08 09:34:49
模糊-PID控制技術(shù)運(yùn)用到程控電壓源的設(shè)計(jì)中,從而使得電壓源的輸出電壓值達(dá)到預(yù)定的要求,提高輸出電壓的精度和反應(yīng)速度。采用51單片機(jī),利用adc0832和DAC0832,通過(guò)220V市電通過(guò)整流
2022-02-25 06:58:16
基于LabVIEW 步進(jìn)電機(jī)PID控制系統(tǒng)的設(shè)計(jì) 陳東,姚成法 (西北工業(yè)大學(xué)航空學(xué)院,陜西西安710072) 摘要:文中給出了基于LabVIEW 的步進(jìn)電機(jī)PID控制系統(tǒng)的設(shè)計(jì)方法,著重介紹
2019-04-09 09:40:01
跪求!!求基于LabVIEW步進(jìn)電機(jī)PID速度控制器的設(shè)計(jì)
2015-04-21 15:52:00
為了克服常規(guī)PID控制器的缺點(diǎn),提出了一種簡(jiǎn)化的模糊PID控制策略。首先利用擴(kuò)充臨界比例帶法將PID公式簡(jiǎn)化為只有一個(gè)控制參數(shù)Kp,然后通過(guò)模糊控制規(guī)則和模糊推理確定一張模糊
2009-03-16 09:20:21 38
38 文中將PID控制器在工程整定方法的基礎(chǔ)上,對(duì) PID參數(shù)作歸一化處理,然后通過(guò)模糊控制規(guī)則和模糊推理確定對(duì)PID 的參數(shù)進(jìn)行調(diào)節(jié),提出了一種新型的模糊PID 算法。從而使 PID 控制器
2009-04-10 10:47:2227 本文運(yùn)用模糊控制與PID 控制分別對(duì)同一受控對(duì)象進(jìn)行控制。通過(guò)MATLAB 仿真,表明了模糊控制與傳統(tǒng)的PID控制相比明顯地改善了控制系統(tǒng)的動(dòng)態(tài)性能。關(guān)鍵詞:模糊控制,PID 控制
2009-06-11 08:54:4736 以同步發(fā)電機(jī)勵(lì)磁自動(dòng)控制系統(tǒng)作為研究對(duì)象,針對(duì)同步發(fā)電機(jī)勵(lì)磁控制方式現(xiàn)狀,在研究模糊控制的基礎(chǔ)上,將模糊PID 控制用于同步發(fā)電機(jī)勵(lì)磁控制系統(tǒng)。并對(duì)所設(shè)計(jì)的模糊PID
2009-08-10 08:16:1722 通過(guò)活性白灰回轉(zhuǎn)窯PLC 生產(chǎn)線工藝分析,對(duì)系統(tǒng)硬件進(jìn)行了配置,分析設(shè)計(jì)了模糊PID 控制器,并給出了自適應(yīng)模糊推理與優(yōu)化設(shè)計(jì)方案,經(jīng)編程在PLC 環(huán)境下實(shí)現(xiàn),經(jīng)過(guò)運(yùn)行效果
2009-08-24 15:07:0317 氣動(dòng)柔性球關(guān)節(jié)的模糊PID控制
介紹了新型氣動(dòng)柔性球關(guān)節(jié),討論研究其控制方法。綜合模糊控制和PID 控制的特點(diǎn),設(shè)計(jì)針對(duì)氣動(dòng)柔性球關(guān)節(jié)的模糊PID 控制器,實(shí)現(xiàn)
2010-02-23 10:03:4514 專家PID控制和模糊PID控制
專家PID控制(Expert Control)的實(shí)質(zhì)是基于受控對(duì)象和控制規(guī)律的各種知識(shí),并以智能的方式利用這些知識(shí)來(lái)設(shè)計(jì)控制器。
2010-05-04 15:51:4699 文中將PID 控制器在工程整定方法的基礎(chǔ)上,對(duì)PID 參數(shù)作歸一化處理,然后通過(guò)模糊控制規(guī)則和模糊推理確定對(duì)PID 的參數(shù)進(jìn)行調(diào)節(jié),提出了一種新型的模糊PID 算法。從而使PID 控
2010-07-01 16:34:1558 為抑制無(wú)刷直流電動(dòng)機(jī)的高度非線性和大量隨機(jī)擾動(dòng),根據(jù)模糊優(yōu)化的PID控制方法設(shè)計(jì)多變量的無(wú)刷直流電機(jī)(BLDCM)的控制方案。該控制方案采用模糊算法在線自動(dòng)整定傳統(tǒng)的PID參
2010-07-10 16:21:5056 提出了一種基于PLC的四相步進(jìn)電機(jī)控制的方法,介紹了控制系統(tǒng)的設(shè)計(jì)方案及其軟硬件的實(shí)現(xiàn)方法。實(shí)現(xiàn)對(duì)四相步進(jìn)電機(jī)的轉(zhuǎn)速控制、正反轉(zhuǎn)控制、以及步數(shù)控制。提出設(shè)計(jì)總體方案
2010-07-21 09:31:1761 參數(shù)自適應(yīng)模糊PID控制器的設(shè)計(jì)
溫度控制系統(tǒng)中,采用了非線性的隸屬度函數(shù),以模糊控制為粗調(diào)、PID為細(xì)調(diào)。在模糊控制的基礎(chǔ)上,由PI
2009-02-27 09:29:312223 
單片機(jī)對(duì)儀表步進(jìn)電機(jī)的細(xì)分控制
儀表步進(jìn)電機(jī)
步進(jìn)電機(jī)是將電脈沖信號(hào)轉(zhuǎn)變?yōu)榻?b class="flag-6" style="color: red">位移或線位移的開(kāi)環(huán)控制元件。在非超載的情況下,電機(jī)轉(zhuǎn)速、停止的位
2009-11-09 17:14:32888 
FPGA在步進(jìn)電機(jī)控制中的應(yīng)用
步進(jìn)電機(jī)是一種將電脈沖轉(zhuǎn)化為角位移的執(zhí)行機(jī)構(gòu)。可以通過(guò)控制脈沖數(shù)來(lái)控制步進(jìn)電機(jī)的角位移量,從而達(dá)到準(zhǔn)確定位的目的,同時(shí)可
2009-12-24 16:52:261645 
針對(duì) 壓電陶瓷 器件在精密定位控制中存在的遲滯、蠕變和位移非線性等不足,將模糊控制和P ID控制相結(jié)合,根據(jù)各自的特點(diǎn)設(shè)計(jì)了模糊推理自校正P ID控制器. 該控制器通過(guò)模糊推理來(lái)實(shí)
2011-08-24 14:47:5341 提出一種用于異步電機(jī)位置控制的模糊神經(jīng)網(wǎng)絡(luò)(fuzzy neural network ,FNN) 控制器。其控制系統(tǒng)采用Sugeno 型FNN 和比例積分(proportional integrate , PI) 控制進(jìn)行構(gòu)建。在進(jìn)行試驗(yàn)測(cè)試之前,利用實(shí)驗(yàn)
2011-09-26 14:35:5032 首先,針對(duì)機(jī)載光電跟蹤控制系統(tǒng)的特點(diǎn),建立了被控對(duì)象的模型。接著,對(duì)機(jī)載光電跟蹤系統(tǒng)模糊PID控制器的設(shè)計(jì)進(jìn)行了詳細(xì)介紹。最后,利用經(jīng)典PID控制、模糊控制、模糊PID控制3種
2012-02-16 17:05:0542 在介紹模糊控制基本原理及模糊控制器設(shè)計(jì)與分類的基礎(chǔ)上,推導(dǎo)出一種簡(jiǎn)化PID型模糊控制器。為了驗(yàn)證簡(jiǎn)化PID型模糊控制器的性能,將其與PD及 PI型模糊控制器進(jìn)行比較。其仿真結(jié)果最
2013-02-21 15:56:0054 感應(yīng)型無(wú)軸承電機(jī)的模糊-PID控制-2007。
2016-04-01 15:42:1920 關(guān)磁阻電機(jī)模糊PID控制系統(tǒng)研究,下來(lái)看看。
2016-04-01 15:56:0812 基于DSP的電機(jī)伺服系統(tǒng)中的模糊PID控制-2011。
2016-04-01 17:23:0926 基于DSP的異步電機(jī)自適應(yīng)模糊PID控制的設(shè)計(jì)-2009。
2016-04-05 10:33:0110 基于FPGA的開(kāi)關(guān)磁阻電機(jī)無(wú)位置傳感器與模糊PID控制系統(tǒng)的研究-2009。
2016-04-05 10:36:2727 基于DSP交流電機(jī)模糊PID控制系統(tǒng)的設(shè)計(jì)-2011。
2016-04-05 10:47:4014 基于LabVIEW的直流伺服電機(jī)模糊PID控制系統(tǒng)。
2016-04-05 10:59:02141 基于變論域模糊PID控制的同步發(fā)電機(jī)勵(lì)磁研究-2011。
2016-04-05 11:05:5313 基于參數(shù)自整定模糊PID控制策略的電機(jī)模型仿真研究-2004。
2016-04-05 11:14:2020 基于模糊PID補(bǔ)償器的多電機(jī)同步控制策略研究-2006。
2016-04-05 11:15:2918 基于模糊PID的超聲電機(jī)控制-2011。
2016-04-05 11:27:5820 基于模糊PID的直流力矩電機(jī)轉(zhuǎn)速控制-2004。
2016-04-05 16:25:0922 基于模糊-PID復(fù)合控制算法的電機(jī)轉(zhuǎn)速控制-2010。
2016-04-05 16:28:0526 基于模糊PID控制的步進(jìn)電機(jī)定位系統(tǒng)-2005。
2016-04-05 16:31:3025 交流伺服電機(jī)的模糊PID控制及GUI設(shè)計(jì)-2011。
2016-04-06 10:55:1325 鋸床電機(jī)系統(tǒng)自適應(yīng)模糊PID控制的仿真-2010。
2016-04-06 11:04:5713 模糊PID控制的步進(jìn)電機(jī)細(xì)分驅(qū)動(dòng)器設(shè)計(jì)-2008。
2016-04-06 11:26:2119 模糊PID控制的異步電機(jī)矢量調(diào)速系統(tǒng)仿真-2008。
2016-04-06 11:32:0827 鼠籠電機(jī)模糊PID控制器的設(shè)計(jì)-2009。
2016-04-06 11:49:058 無(wú)刷直流電機(jī)的模糊PID控制算法研究-2010。
2016-04-06 11:51:5617 一種新的模糊PID控制在電機(jī)軟啟動(dòng)中的仿真-2011。
2016-04-06 14:03:4117 異步電機(jī)的模糊PID矢量控制-2010。
2016-04-06 14:10:2921 異步化同步發(fā)電機(jī)轉(zhuǎn)子勵(lì)磁的模糊PID控制-2006。
2016-04-06 14:12:1112 音圈電機(jī)伺服系統(tǒng)模糊PID控制-2010。
2016-04-06 14:21:4918 應(yīng)用于直線電機(jī)的平滑切換模糊PID控制方法-2006。
2016-04-06 14:23:4012 永磁同步電機(jī)模糊PID參數(shù)自整定-2011。
2016-04-06 14:26:0422 直流無(wú)刷電機(jī)模糊PID控制研究-2009。
2016-04-06 14:33:2841 直線電機(jī)模糊增量PID控制算法的研究-2011。
2016-04-06 14:45:4429 自整定模糊PID控制在電機(jī)控制系統(tǒng)中的應(yīng)用-2008。
2016-04-06 14:49:5740 主要講解pid的控制,特別是模糊控制。
2016-04-13 15:13:3423 基于模糊_PID復(fù)合控制算法的電機(jī)轉(zhuǎn)速控制。
2016-05-03 13:52:5922 步進(jìn)電機(jī)短位移高響應(yīng)加減速控制方法研究。
2016-05-04 14:09:564 模糊PID控制率的舵機(jī)系統(tǒng)設(shè)計(jì),有助于對(duì)舵機(jī)的理解和對(duì)模糊PID的理解。
2016-05-06 14:37:509 基于模糊規(guī)則的無(wú)刷直流電機(jī)免疫PID控制_夏長(zhǎng)亮
2017-01-13 14:28:310 基于模糊PID控制器的控制方法研究_王述彥
2017-02-08 01:58:380 模糊神經(jīng)PID在空分液位控制中的應(yīng)用_宋星星
2017-01-18 20:21:461 模糊PID在合金化爐爐壓控制中的應(yīng)用_李富強(qiáng)
2017-01-18 20:21:460 基于模糊理論與常規(guī)PID控制的模糊PID控制方法研究_趙笑笑
2017-01-31 15:22:448 論文以提高步進(jìn)電機(jī)系統(tǒng)性能為目的,研究了經(jīng)典PID控制理論與現(xiàn)代模糊控制理論,把現(xiàn)代模糊控制理論和經(jīng)典PID控制理論有機(jī)結(jié)合,構(gòu)建了適合于步進(jìn)電動(dòng)機(jī)控制要求的模糊PID控制器結(jié)構(gòu),設(shè)計(jì)了相應(yīng)的控制
2017-10-13 10:31:3413 基于塔吊吊物的高效運(yùn)行和安全性為目的,采用了一種基于模糊PID控制的算法來(lái)進(jìn)行塔吊消擺。通過(guò)塔吊防擺控制系統(tǒng)的模糊PID控制器對(duì)小車移動(dòng)的位移進(jìn)行控制,同時(shí)用模糊控制算法對(duì)擺角進(jìn)行控制,即控制
2017-11-13 10:17:1313 為抑制無(wú)刷直流電動(dòng)機(jī)的高度非線性和大量隨機(jī)擾動(dòng),根據(jù)模糊優(yōu)化的PID控制方法設(shè)計(jì)多變量的無(wú)刷直流電機(jī)(BLDCM)的控制方案。該控制方案采用模糊算法在線自動(dòng)整定傳統(tǒng)的PID參數(shù),可用來(lái)設(shè)計(jì)多自由度
2017-12-05 11:23:1215 基于提高兩相混合式步進(jìn)電機(jī)的穩(wěn)態(tài)性能和動(dòng)態(tài)特性的目的,本文結(jié)合轉(zhuǎn)矩矢量控制策略,提出基于DSP的步進(jìn)電機(jī)驅(qū)動(dòng)器設(shè)計(jì)方案。通過(guò)采用最大電流/轉(zhuǎn)矩的轉(zhuǎn)子磁場(chǎng)定向失量控制,完成對(duì)兩相混合式步進(jìn)電機(jī)的控制
2017-12-07 10:07:498 步進(jìn)電機(jī)位移與輸入脈沖信號(hào)數(shù)相對(duì)應(yīng),精度高、響應(yīng)特性好、可靠性高、速度可在較寬范圍內(nèi)平滑調(diào)節(jié),是控制系統(tǒng)中一種重要的自動(dòng)化執(zhí)行元件。
2018-09-07 09:14:004169 
對(duì)步進(jìn)電機(jī)的控制是經(jīng)濟(jì)型數(shù)控系統(tǒng)開(kāi)發(fā)時(shí)的一項(xiàng)重要內(nèi)容,其中對(duì)步進(jìn)電機(jī)運(yùn)動(dòng)過(guò)程中的升 降速控制是重點(diǎn)。步進(jìn)電機(jī)是將電脈沖信號(hào)轉(zhuǎn)變?yōu)榻?b class="flag-6" style="color: red">位移或線位移的開(kāi)環(huán)控制元步進(jìn)電機(jī)件。
2018-10-26 09:23:0018048 針對(duì)在復(fù)雜系統(tǒng)中實(shí)現(xiàn)自組織參數(shù)的PID控制問(wèn)題,介紹了一種基于模糊控制原理的PID參數(shù)自組織控制器的設(shè)計(jì)方案, 同時(shí)利用MATLAB中的SIMULINK和FUZZY工具箱進(jìn)行了仿真研究,仿真結(jié)果表明,參數(shù)自組織模糊控制系統(tǒng)比參數(shù)固定的系統(tǒng)的控制效果好。
2019-09-20 17:08:1916 增量式PID控制算法程序設(shè)計(jì)方案下載
2021-03-29 09:48:347 非自衡化工生產(chǎn)過(guò)程的PID控制器設(shè)計(jì)方案
2021-06-23 15:30:0914 針對(duì)傳統(tǒng)PID控制的直流無(wú)刷電機(jī)調(diào)速系統(tǒng)存在響應(yīng)速度慢,控制效果不佳等問(wèn)題,設(shè)計(jì)了基于模糊優(yōu)化的PID調(diào)速系統(tǒng)。本文分
析了直流無(wú)刷電機(jī)基本工作原理,經(jīng)過(guò)模糊自整定PID優(yōu)化控制器調(diào)節(jié)輸出值,通過(guò)
2023-03-09 11:25:355 步進(jìn)電機(jī)是將電脈沖信號(hào)轉(zhuǎn)變?yōu)榻?b class="flag-6" style="color: red">位移或線位移的開(kāi)環(huán)控制元件。在非超載的情況下,電機(jī)的轉(zhuǎn)速、停止的位置只取決于脈沖信號(hào)的頻率和脈沖數(shù),而不受負(fù)載變化的影響,即給電機(jī)加一- 個(gè)脈沖信號(hào),電機(jī)則轉(zhuǎn)過(guò)
2023-03-21 11:01:202 本篇來(lái)介紹電機(jī)的位置環(huán)控制,實(shí)現(xiàn)電機(jī)快速準(zhǔn)確地轉(zhuǎn)動(dòng)到指定位置。回顧上篇,電機(jī)速度PID控制的結(jié)構(gòu)圖如下,目標(biāo)值是設(shè)定的速度,通過(guò)編碼器獲取電機(jī)的轉(zhuǎn)速作為反饋,實(shí)現(xiàn)電機(jī)轉(zhuǎn)速的控制。再來(lái)看電機(jī)位置PID
2023-05-06 11:50:367 本文中采用的是模糊自適應(yīng) PID 控制算法,它與傳統(tǒng) PID 算法相比,對(duì)被控對(duì)象的非線性、時(shí)變性和不確定性具有很好的控
制效果,且不需要建立控制過(guò)程精確的數(shù)學(xué)模型,對(duì)數(shù)學(xué)模型依賴性弱。因此將兩者
2023-05-06 11:41:491 基于步進(jìn)電機(jī)驅(qū)動(dòng)原理,對(duì)步進(jìn)電機(jī)驅(qū)動(dòng)方式進(jìn)行分析,提出了基于西門子S7-1200系列PLC的步進(jìn)電機(jī)位置控制裝置的電氣系統(tǒng)硬件接線及軟件設(shè)計(jì)。通過(guò)測(cè)試,該裝置能對(duì)位置進(jìn)行精確控制及狀態(tài)監(jiān)控,在光伏發(fā)電追光系統(tǒng)中可用于光伏板的控制,也適用于PLC運(yùn)動(dòng)控制教學(xué)實(shí)訓(xùn),在自動(dòng)化裝置中有較好的推廣價(jià)值。
2023-10-23 14:38:162584 
步進(jìn)電機(jī):** 步進(jìn)電機(jī)是一種將電脈沖信號(hào)轉(zhuǎn)換成相應(yīng)角位移或線位移的電動(dòng)機(jī)。
2023-11-02 09:35:541220 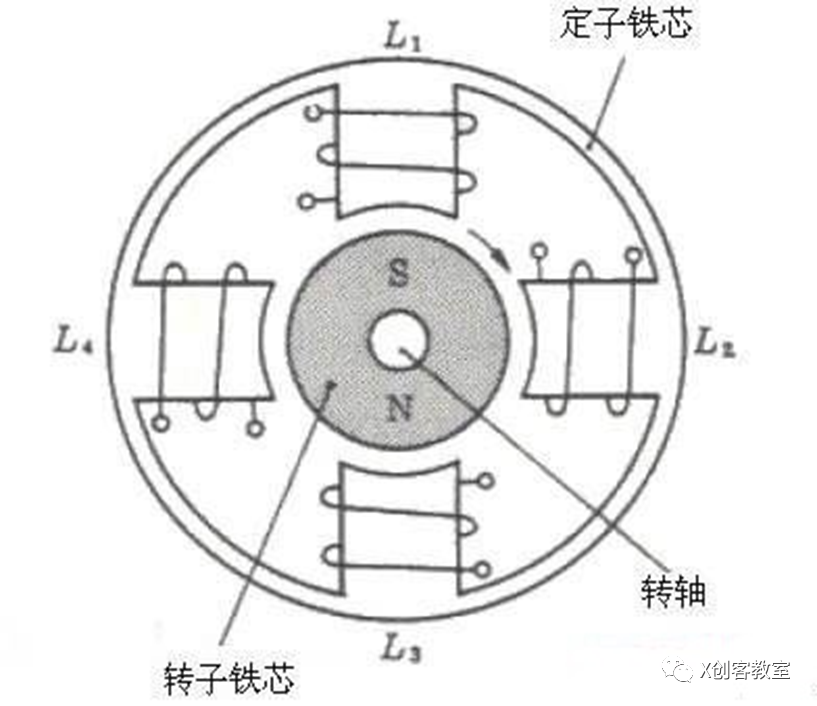
 電子發(fā)燒友App
電子發(fā)燒友App


 ??????????????????????
?????????????????????? 







 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論