 KUKA機器人電伺服焊鉗時是如何進行焊鉗力的控制
KUKA機器人電伺服焊鉗時是如何進行焊鉗力的控制
我們在學習KUKA機器人電伺服焊鉗時是如何進行焊鉗力的控制,進行加緊的呢?
以下是焊鉗在執行力時進行的加緊力控制!
例:
GLOBALDEF SGM_MOVE_TO_FORCE (FORCE :IN, MovementType:IN, GunClosingReason:IN, SGEQ_ParamSet:IN, SGRS_ParamSet:IN )
移動焊鉗到使用力
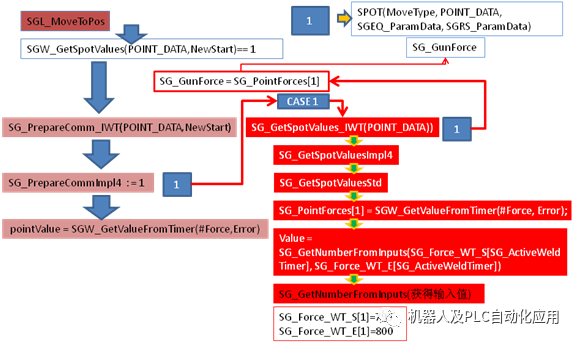
力值的給入時序圖:
IF(ServoGun[SG_ActiveGunNumber].GunControl == #Force)THEN
由于ServoGun[1]= #Position所以不執行力模式
ACTIVATE_FORCE_MODE((6+SG_ExtaxActive), FORCE, SGL_CalcPartPos(SG_CurrentCmd),SGEQ_AFM_ConstSpeedUser)
ENDIF
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
KUKA機器人
+關注
關注
4文章
143瀏覽量
9224
原文標題:KUKA控制力的函數ACTIVATE_FORCE_MODE()
文章出處:【微信號:gh_a8b121171b08,微信公眾號:機器人及PLC自動化應用】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
【「具身智能機器人系統」閱讀體驗】2.具身智能機器人的基礎模塊
具身智能機器人的基礎模塊,這個是本書的第二部分內容,主要分為四個部分:機器人計算系統,自主機器人的感知系統,自主機器人的定位系統,自主機器人
發表于 01-04 19:22
開源項目!能夠精確地行走、跳舞和執行復雜動作的機器人—Tillu
認識Tillu——機器人
Tillu是一款融合先進機器人技術與創造力的獨特機器人,旨在激發學習與創新!它由運行Debian操作系統的UNIHIKER驅動,利用強大的
發表于 01-02 17:24
【「具身智能機器人系統」閱讀體驗】2.具身智能機器人大模型
。
多模態融合的創新與突破
機器人控制技術的另一個重要突破在于多模態大模型的應用。相比于僅通過文字進行人機交互的傳統方法,現代機器人能夠融合視覺、聲音、定位等多模態輸入信息,為任務執行
發表于 12-29 23:04
伺服電機在機器人中的應用有哪些
伺服電機作為現代工業自動化領域的核心組件,其精確控制和高效性能在機器人技術中扮演著至關重要的角色。 伺服電機的工作原理 伺服電機是一種能夠將
基于導納控制的機器人拖動示教原理和實現步驟
的平衡,使得機器人能夠穩定地進行任務操作。? ? ??4.適應性(Adaptability):導納控制的一個優勢是它的適應性,即機器人可以適應不同大小和方向的外部
智能升級:機器人焊鉗修磨機VS傳統修磨機,效率與質量的雙重飛躍
機器人焊鉗自動修磨機實現高度自動化,提升磨削精度與效率,確保安全與可靠性,降低長期成本,提高經濟效益和適應性。其優勢顯著,將推動智能制造產業升級。
Al大模型機器人
理解能力強大: AI大模型機器人可以理解和生成自然語言,能夠進行復雜的對話和語言任務。它們能夠識別語言中的語義、語境和情感,并據此作出適當的回應。廣泛的知識儲備: 這些模型基于大規模的數據集進行訓練,擁有
發表于 07-05 08:52
AMD Kria? KR 260套件+ROS 2快速開發機器人解決方案
伺服系統,其中不僅包含電機,還包含微控制器和網絡功能。雖然這使得機器人應用所需的復雜電機驅動成為可能,但這也意味著每個伺服系統都有幾個不同的驅動和控

如何使用PLC控制機器人
隨著工業自動化技術的飛速發展,機器人技術作為其中的重要組成部分,其應用范圍日益廣泛。在機器人的控制系統中,PLC(Programmable Logic Controller,可編程邏輯控制

基于FPGA EtherCAT的六自由度機器人視覺伺服控制設計
,為工業自動化提供了一套切實可行的方案。
本文針對基于機器視覺的工業機器人進行研究,主要工作包括以下幾點:
(1)設計了基于 伊瑟特的六自由度機器人視覺
發表于 05-29 16:17
基于FPGA的六自由度機器人視覺伺服控制方案設計
? 機器人視覺系統的硬件選擇直接影響圖像采集,圖像的質量和后期的處理,并影響整個控制系統的實時性,所以應根據要求和這些硬件性能,嚴格選擇硬件。基于伊瑟特的六自由度機器人視覺伺服
發表于 04-24 10:31
?604次閱讀

KUKA機器人8.7系統對PROFINET軟件進行編程控制的步驟
為了可以在不同的機器人上交替地運行一個設備,需要 IOCTL 命
令 1060 進行解耦。






 工商網監
工商網監
評論