 ABB機器人示教器入門-初級教學
ABB機器人示教器入門-初級教學

手動操作窗口示意圖: 步驟1、將機器人操作模式選擇器置于手動限速模式。步驟2、在ABB菜單中,單擊手動操縱打開手動操縱窗口。
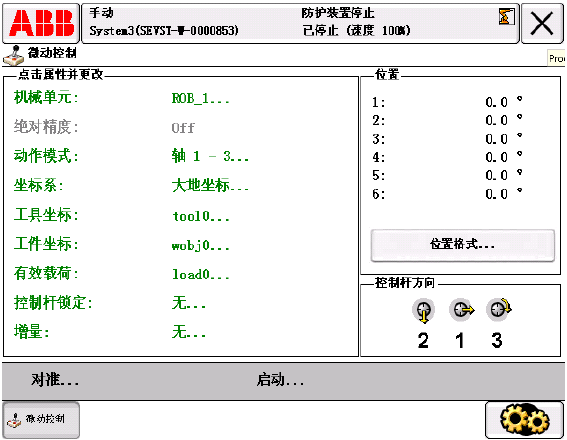 ?機械單元:步驟1、打開手動操縱窗口,并點擊機械單元。步驟2、在彈出的窗口中選擇需要進行控制的機械單元,然后點擊確定。
?機械單元:步驟1、打開手動操縱窗口,并點擊機械單元。步驟2、在彈出的窗口中選擇需要進行控制的機械單元,然后點擊確定。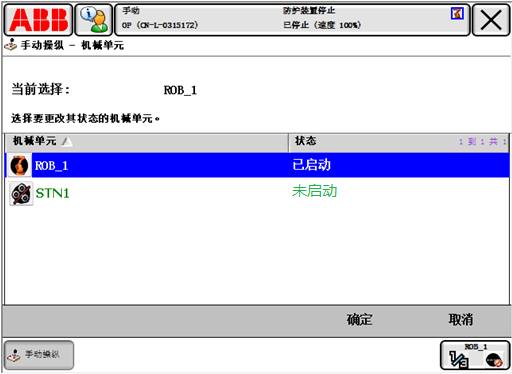 ?運動模式:步驟1、打開手動操縱窗口,并點擊動作模式。步驟2、在彈出的窗口中選擇所需模式,然后點擊確定。
?運動模式:步驟1、打開手動操縱窗口,并點擊動作模式。步驟2、在彈出的窗口中選擇所需模式,然后點擊確定。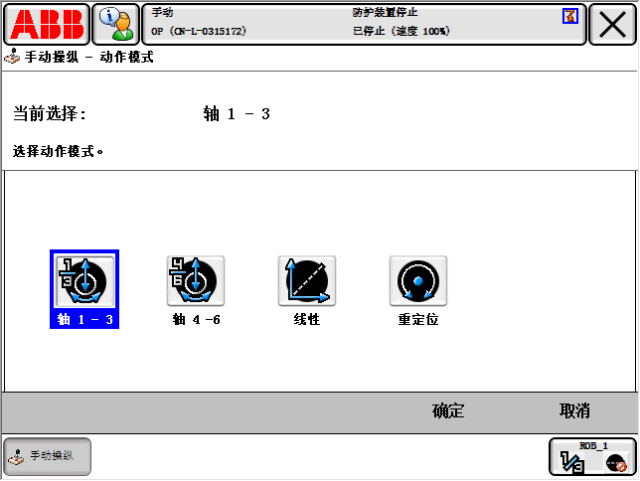 ?單軸運動Axis 1-3 軸 1-3
?單軸運動Axis 1-3 軸 1-3 機器人一、二、三每個轉軸單獨轉動。
機器人一、二、三每個轉軸單獨轉動。 Axis 4-6 軸 4-6
Axis 4-6 軸 4-6 機器人四、五、六每個轉軸單獨轉動。
機器人四、五、六每個轉軸單獨轉動。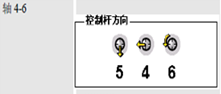 單軸運動何時使用比較好呢?(1)將機械單元移出危險位置;(2)將機器人移出奇點;(3)定位機器人軸,以便進行校準。注:機器人外軸運動必須為單軸運動;為了更精確校準,可使用微動控制。
重定位運動姿態運動:機器人TCP位置不變,機器人工具沿坐標軸轉動,改變姿態。
單軸運動何時使用比較好呢?(1)將機械單元移出危險位置;(2)將機器人移出奇點;(3)定位機器人軸,以便進行校準。注:機器人外軸運動必須為單軸運動;為了更精確校準,可使用微動控制。
重定位運動姿態運動:機器人TCP位置不變,機器人工具沿坐標軸轉動,改變姿態。
 注:重定位運動時,必須先選擇工具坐標。
線性運動基坐標何時使用:當需要將可預測的運動輕而易舉地轉化為控制桿運動時,可以在基坐標系中進行微動控制。在許多情況下,基坐標系是使用最為方便的一種坐標系,因為它對工具、工件或其它機械單元沒有依賴性。
注:重定位運動時,必須先選擇工具坐標。
線性運動基坐標何時使用:當需要將可預測的運動輕而易舉地轉化為控制桿運動時,可以在基坐標系中進行微動控制。在許多情況下,基坐標系是使用最為方便的一種坐標系,因為它對工具、工件或其它機械單元沒有依賴性。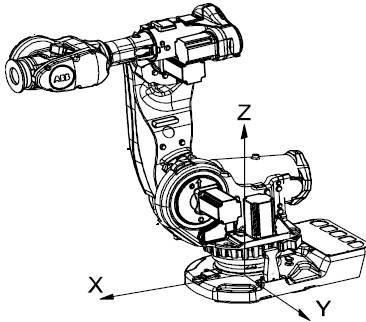 操作步驟(1)在ABB菜單中,點擊微動控制,查看微動控制屬性;(2)點擊動作模式,然后點擊線性,再點擊確定,如果之前已選擇線性動作,則無需執行此步驟;(3)點擊坐標系,然后點擊基坐標,再點擊確定;(4)按住使動裝置,啟動操縱器電機;(5)移動控制桿,機械單元將隨之移動;
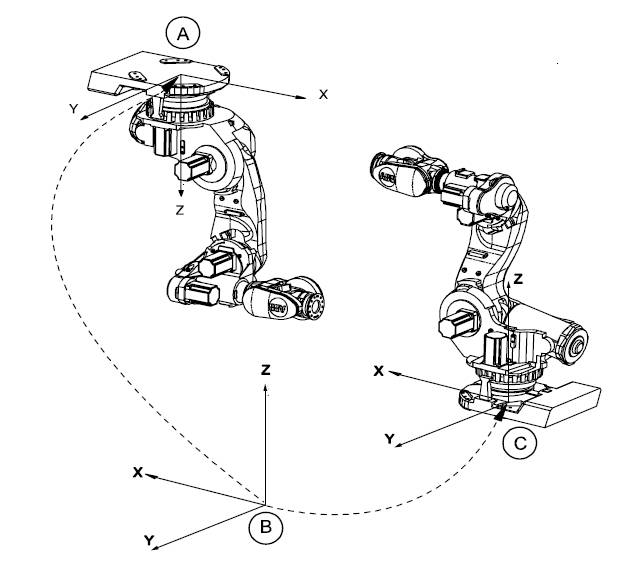
線性運動大地坐標何時使用:例如:有兩個機器人,一個安裝于地面,一個倒置。代表機器人的基坐標系也將上下顛倒。如果在倒置機器人的基坐標系中進行微動控制,則很難預測移動情況。此時可選擇共享大地坐標系。
操作步驟(1)在ABB菜單中,點擊微動控制,查看微動控制屬性;(2)點擊動作模式,然后點擊線性,再點擊確定,如果之前已選擇線性動作,則無需執行此步驟;(3)點擊坐標系,然后點擊基坐標,再點擊確定;(4)按住使動裝置,啟動操縱器電機;(5)移動控制桿,機械單元將隨之移動;
線性運動大地坐標何時使用:例如:有兩個機器人,一個安裝于地面,一個倒置。代表機器人的基坐標系也將上下顛倒。如果在倒置機器人的基坐標系中進行微動控制,則很難預測移動情況。此時可選擇共享大地坐標系。
 操作步驟(1)在ABB菜單中,點擊微動控制,查看微動控制屬性。(2)點擊動作模式,然后點擊線性,再點擊確定,如果之前已選擇線性動作,則無需執行此步驟。(3)點擊坐標系,然后點擊基坐標,再點擊確定。(4)按住使動裝置,啟動操縱器電機。(5)移動控制桿,機械單元將隨之移動。
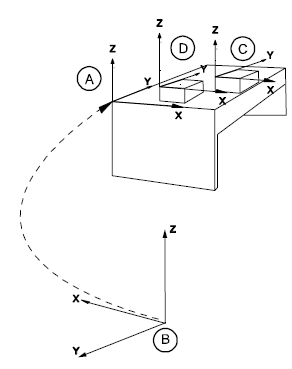
線性運動工件坐標何時使用:例如:工廠打算確定一系列孔的位置,以便沿著工件邊緣鉆孔。工廠打算在工件箱的兩面隔板之間焊接。
操作步驟(1)在ABB菜單中,點擊微動控制,查看微動控制屬性。(2)點擊動作模式,然后點擊線性,再點擊確定,如果之前已選擇線性動作,則無需執行此步驟。(3)點擊坐標系,然后點擊基坐標,再點擊確定。(4)按住使動裝置,啟動操縱器電機。(5)移動控制桿,機械單元將隨之移動。
線性運動工件坐標何時使用:例如:工廠打算確定一系列孔的位置,以便沿著工件邊緣鉆孔。工廠打算在工件箱的兩面隔板之間焊接。
 操作步驟(1)在ABB菜單中,點擊微動控制,查看微動控制屬性。(2)點擊動作模式,然后點擊線性,再點擊確定,如果之前已選擇線性動作,則無需執行此步驟。(3)點擊工件以選擇工件。(4)點擊工具以選擇工具。(5)點擊有效載荷以選擇有效載荷(6)點擊坐標系,然后點擊工件,再點擊確定。(7)按住使動裝置,啟動操縱器電機。(8)移動控制桿,機械單元將隨之移動。
線性運動工具坐標何時使用:使用工具體系對穿、鉆、銑、鋸等進行編程和調整
操作步驟(1)在ABB菜單中,點擊微動控制,查看微動控制屬性。(2)點擊動作模式,然后點擊線性,再點擊確定,如果之前已選擇線性動作,則無需執行此步驟。(3)點擊工件以選擇工件。(4)點擊工具以選擇工具。(5)點擊有效載荷以選擇有效載荷(6)點擊坐標系,然后點擊工件,再點擊確定。(7)按住使動裝置,啟動操縱器電機。(8)移動控制桿,機械單元將隨之移動。
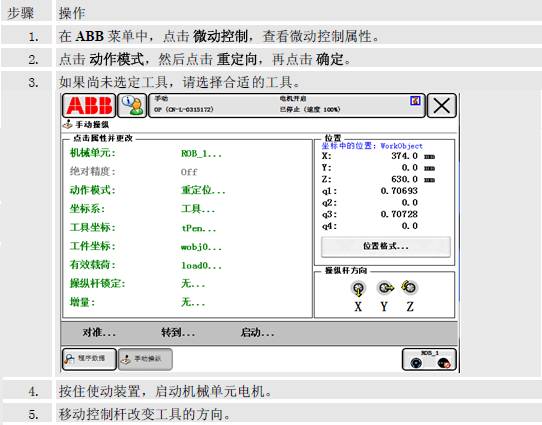
線性運動工具坐標何時使用:使用工具體系對穿、鉆、銑、鋸等進行編程和調整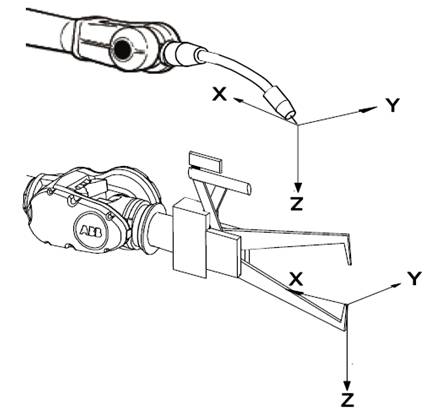 操作步驟(1)在ABB菜單中,點擊微動控制,查看微動控制屬性。(2)點擊動作模式,然后點擊線性,再點擊確定,如果之前已選擇線性動作,則無需執行此步驟。(3)選擇合適的工具。(4)點擊坐標系,然后點擊工具,再點擊確定。(5)按住使動裝置,啟動機械單元電機。(6)移動控制桿,機械單元將隨之移動。
操作步驟(1)在ABB菜單中,點擊微動控制,查看微動控制屬性。(2)點擊動作模式,然后點擊線性,再點擊確定,如果之前已選擇線性動作,則無需執行此步驟。(3)選擇合適的工具。(4)點擊坐標系,然后點擊工具,再點擊確定。(5)按住使動裝置,啟動機械單元電機。(6)移動控制桿,機械單元將隨之移動。審核編輯 :李倩
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
機器人
+關注
關注
213文章
29664瀏覽量
212414 -
ABB
+關注
關注
26文章
561瀏覽量
54162
原文標題:ABB機器人示教器入門-初級教學|干貨
文章出處:【微信號:AMTBBS,微信公眾號:世界先進制造技術論壇】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
熱點推薦
人形機器人背后的“靈魂導師”:工程師示教的價值與富唯智能的實踐
示教不是對機器的妥協,而是對人機協同的深度賦能。正如訓練師吳廣所言:“要把機器人當作伙伴”——工程師輸入的不僅是數據,更是讓機器理解物理世界

開疆智能Profient轉ModbusTCP網關連接ABB機器人MODBUS TCP通訊案例
使用網線即可,但是網線連接的是機器人控制器的“X5”網口中。 案例: 1. ABB機器人現在要讀取調試工具中的保持寄存器的值,從第6字節開始

【「# ROS 2智能機器人開發實踐」閱讀體驗】機器人入門的引路書
ROS的全稱:Robot Operating System 機器人操作系統
ROS的 目的 :ROS支持通用庫,是通信總線,協調多個傳感器
為了解決機器人里各廠商模塊不通用的問題,讓機器人
發表于 04-30 01:05
ABB機器人與西門子PLC通訊案例
在現代工業自動化領域中,機器人與可編程邏輯控制器(PLC)之間的通訊是實現高效、精準生產線的關鍵。ABB機器人與西門子PLC作為行業內的佼佼者,其通訊技術的掌握對于提升生產效率、優化生
ModbusTCP轉Profinet:ABB機器人與PLC的高效連接
在工業自動化領域,不同設備間的通訊和數據交換是系統穩定運行的關鍵。其中,ABB機器人與PLC(可編程邏輯控制器)之間的協作尤為重要。為實現這一目標,我們常常需要通過特定的通訊協議進行數據的傳輸和指令
智能拖動示教噴涂機器人:技術革新與未來展望
? ? ? 智能拖動示教噴涂機器人是近年來工業自動化領域的一項重要創新,它的出現不僅極大地提升了噴涂作業的效率和質量,還為傳統制造業的轉型升級提供了有力支持。本文將從智能拖動示

三分鐘讓你明白拖動示教噴涂機器移動速度是多少
的移動速度。? ? ??拖動示教技術簡介? ? ??拖動示教技術,是一種創新的機器人編程方法,它允許操作人員直接通過拖動噴涂

什么是拖動示教?機器人拖動示教方式分析
隨著拖動示教在協作機器人、并聯機器人上的應用,將調試技術趨向快速、簡便的方向發展,滿足生產企業應用機器人進行及時、高效的生產需求,以及在工業

基于導納控制的機器人拖動示教原理和實現步驟
(Admittance)模型描述。導納模型類似于彈簧和阻尼器的組合,用來描述機器人對外部力和運動的響應。機器人拖動示教系統DMC600M?
焊接機器人示教模式怎么設置
在現代制造業中,焊接機器人廣泛應用于提高生產效率和焊接質量。而焊接機器人示教模式的正確設置,是確保自動化焊接過程精確執行的重要環節。今天創想智控焊縫跟蹤系統小編帶大家了解焊接

工業機器人常用的編程方式
機器人完成特定的任務。編程可以手動完成,也可以通過計算機輔助設計(CAD)軟件自動生成。編程方式的選擇取決于任務的復雜性、機器人的類型、以及所需的靈活性和效率。 1. 手動編程 1.1 示教





 工商網監
工商網監
評論