") 工業(yè)自動化產(chǎn)業(yè)所需的機器人關(guān)節(jié)用伺服電機
工業(yè)自動化產(chǎn)業(yè)所需的機器人關(guān)節(jié)用伺服電機

機器人的概念已經(jīng)是非常地廣泛,本文所探討的是工業(yè)自動化產(chǎn)業(yè)所需的機器人關(guān)節(jié)用伺服電機,暫不涉及到服務(wù)型機器人的復(fù)合一體化關(guān)節(jié)伺服電機。
工業(yè)機器人大體上分類為線性機器人(又叫直角坐標機器人)、多自由度機器人(又叫多關(guān)節(jié)機器人)、并聯(lián)機器人(又叫deltaΔ機器人)和水平多關(guān)節(jié)機器人(又叫scara機器人)。由各種類型的關(guān)節(jié)機械手臂和自動化傳輸設(shè)備結(jié)合而成的自動化島。不同功能的自動化島鏈接而成自動化線,不同的自動化線結(jié)合組成自動化車間。
在這些自動化工業(yè)機器人和自動化單元之間,伺服電機始終處于將機構(gòu)按照控制指令的要求準確、及時、穩(wěn)妥地傳送到位的關(guān)鍵作用,所以屬于核心零部件。
永磁伺服電機的基本概念
伺服是根據(jù)控制電腦系統(tǒng)的指令能夠不折不扣執(zhí)行的意思,它不僅僅限于電動機、液壓,包括氣動在內(nèi),能完成該任務(wù)的所有元件均為伺服原件。
電動機是將電能轉(zhuǎn)換成機械能的機電轉(zhuǎn)換部件。伺服電機是能被應(yīng)用于運動控制系統(tǒng)中的電動機,它的輸出參數(shù),如位置、速度、加速度或轉(zhuǎn)矩都是可控的。
由于控制指標的不同,伺服電機可以有不同類型。按照電源類型的不同可分為交流伺服電機和直流伺服電機;按照運轉(zhuǎn)方式又可分為直線型伺服電動機和旋轉(zhuǎn)型伺服電動機。直線型電動機直接產(chǎn)生牛頓力,旋轉(zhuǎn)型電動機輸出旋轉(zhuǎn)力矩。旋轉(zhuǎn)型電動機驅(qū)動直線型負載需要通過絲杠等機械機構(gòu)將旋轉(zhuǎn)運動轉(zhuǎn)換成直線運動。
旋轉(zhuǎn)型交流伺服電機按照轉(zhuǎn)子結(jié)構(gòu)分為交流異步伺服電機和交流同步伺服電機。交流異步伺服電機轉(zhuǎn)子為鋁制或銅制鼠籠,鼠籠轉(zhuǎn)速始終和同步旋轉(zhuǎn)磁場有一定轉(zhuǎn)速差。該類型的電機在矢量調(diào)速技術(shù)下可獲得與直流電機一樣完美的力矩控制特性,但是轉(zhuǎn)子具有慣量大、恒功率特性好、調(diào)速范圍寬的特點,適合于機床切削和印刷機械收放卷類等大范圍的變慣量負載,缺點是啟動力矩小,電磁響應(yīng)速度不如永磁伺服電機,電磁時間常數(shù)值是永磁材料制成的永磁電機的10倍左右,又由于功率密度低,轉(zhuǎn)子尺寸大,所以不適合高動態(tài)的伺服場合。
旋轉(zhuǎn)型交流同步伺服電機的轉(zhuǎn)子使用的是永磁材料,直接產(chǎn)生勵磁磁場,不存在需要勵磁電流建立電機磁場的過程,所以電磁響應(yīng)快。并且,由于當前的稀土永磁材料能量密度高,使得該類電機功率密度高,為進一步設(shè)計成各種特性的伺服電機提供了可能。高動態(tài)響應(yīng)可以設(shè)計成細長型的小轉(zhuǎn)子慣量,也可以設(shè)計成粗短型的大轉(zhuǎn)子慣量。稀土永磁材料的使用奠定了永磁電機作為伺服電機的首選可能。由于稀土永磁材料仍然是伺服電機各材料中最昂貴的部分。不同廠家使用的材料的差異,將產(chǎn)品品質(zhì)分成了不同的層次。好的永磁材料可以是在150℃的工作溫度以上不會退磁,差的永磁材料在電機工作溫度不足120℃時可能就會出現(xiàn)退磁。永磁材料的直接決定著伺服電機的不同特性。
直線伺服電機直接輸出牛頓力,無需通過機構(gòu)轉(zhuǎn)換,可以獲得很高的加速度,近年來,技術(shù)進步很快,廣泛應(yīng)用于高性能機床進給軸,在工業(yè)機器人上僅限于部分用于線性機械手臂,不作為本文介紹的重點。本文重點討論旋轉(zhuǎn)型永磁伺服電機及其在工業(yè)機器人上的應(yīng)用。
旋轉(zhuǎn)型永磁電機的結(jié)構(gòu)
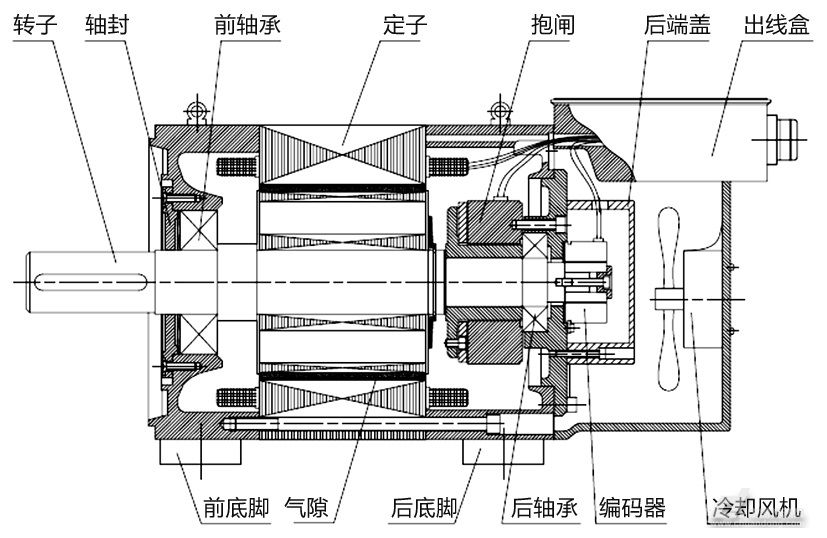
圖1 永磁伺服電機的結(jié)構(gòu)圖
圖1所示的是典型的永磁伺服電機的結(jié)構(gòu)圖。為了全面描述,盡量通過一個圖可以看清永磁伺服電機結(jié)構(gòu)的全貌。事實上小功率永磁伺服電機在15kw以內(nèi),可以自然散熱,無需設(shè)計冷卻風機,電機小巧,無需通過安裝地腳固定,安裝吊環(huán)也是不必要的,引出線方式從接線盒改為航空插頭更為簡潔。這樣電機外形就變成圖2(a)所示的樣子,如果電機很小,在1kw以內(nèi),引出線用的航空插頭也是不必要的,直接引出一段電纜甩線,就變成了圖2(b)所示的樣子。
這里假設(shè)讀者對于電機原理是理解的,僅從機器人電機的特點對永磁伺服電機的結(jié)構(gòu)做區(qū)別性說明。
軸承:伺服電機的壽命和軸承密切相關(guān),由于機器人對可靠性和耐用性的要求,軸承至少要確保30000小時的使用壽命。這樣按照8小時工作制折算,至少機器人的使用壽命在10年以上,軸承的轉(zhuǎn)速要確保6000rpm可以斷續(xù)工作。
定子沖片和繞組:由于機器人電機需要高功率密度,為了體積小,鐵耗發(fā)熱小,沖片材料要在0.35mm以下的冷扎矽鋼片。繞組要長期經(jīng)受16K的變頻載波脈沖沖擊,為了防止被擊穿,承受密集的dv/dt沖擊,耐壓要不低于2500V。
轉(zhuǎn)子永磁材料:永磁材料是永磁伺服電機里最為昂貴的部分,稀土元素含量低的材料居里點低,材料穩(wěn)定性差,如果使用釹鐵硼永磁體,最好在UH42以上,并且,要注意鏑等稀土元素的含量,為了保證高溫抗退磁,釤鈷永磁體也經(jīng)常在中小伺服電機中廣泛使用。總之,要確保伺服電機在正常的使用場合真正永不退磁。否則,機器人的長期穩(wěn)定性能無法保障。
軸封:為了防止油污,雜物進入電機,又要保證運轉(zhuǎn),在電機軸端加軸封是常規(guī)設(shè)計。機器人常常在伺服電機的電機軸端銑一個小齒輪、電機和減速機直接相連,高溫和油污都可能進入電機,因此,就需要多唇高溫軸封,比如雙唇氟橡膠軸封就比單唇丁晴橡膠軸封可靠,當然成本差異也很大。
抱閘:抱閘是機器人電機的基本選項。近乎95%以上的伺服電機需要抱閘,要確保時刻抱閘,尤其在緊急停車時可靠運行,抱閘需要有足夠的安全系數(shù),靜扭矩大約在電機額定扭矩的1.5倍左右,重載型機器人電機抱閘的安全系數(shù)要達到2.0甚至2.5倍。有一點需要注意的是,機器人電機的抱閘是安全制動器,不是剎車制動器,控制上要確保在急停狀態(tài)下通過制動電阻讓伺服驅(qū)動器的剎車電路工作,電機轉(zhuǎn)速接近0的時候抱閘動作。為了提高抱閘的響應(yīng)速度,永磁抱閘優(yōu)于電磁彈簧抱閘。
編碼器:編碼器安裝于電機尾端,是屬于電機速度和轉(zhuǎn)子位置傳感器。可以測量轉(zhuǎn)子的位置用于伺服控制磁場定位和轉(zhuǎn)子實際位置和速度給控制電腦,用于運動軌跡計算。機器人電機編碼器一般精度不高,但需要多圈絕對位置可測量,保證斷電之后,再次運行,斷電前面的位置可以記憶。目前流行三種方式解決機器人電機編碼器的問題。第一種方式是單圈采用格雷碼光電或磁碼盤,多圈采用機械齒輪。這樣的好處是測量精度高,斷電后約會通過編碼器的機械位置記住電機的運行位置,上電后直接讀取即可,但缺點是編碼器太厚,在有限的安裝空間下就顯得過分長。第二種是單圈信心通過光電或磁編格雷碼記憶,多圈通過電池供電電子記憶,這樣就可以把編碼器做得很短,對外方小于60mm的小伺服電機非常適合。缺點是電池的使用壽命比較短,長則2-3年,有的1年就要更換電池。第三種方式是精度要求不高的場合才使用的旋轉(zhuǎn)變壓器測量單圈位置,多圈信息通過在控制箱里的帶電池電路板完成。
轉(zhuǎn)子軸伸:由于頻繁的正反轉(zhuǎn),電機承受一定的剪切力,軸的材料最好采用42CrMo調(diào)制。若果電機帶鍵安裝,無論如何要把鍵滿裝,這樣才可以有效減小電機的的動平衡和跳動量。在高速運轉(zhuǎn)下,伺服電機帶鍵和光軸的空載運行跳動要相差9倍之多,不可小視。
永磁伺服電機主要傳動參數(shù)
工作區(qū):在電動機溫升不超過允許溫升的條件下,電動機能長期工作的區(qū)域稱為連續(xù)工作區(qū);在連續(xù)工作區(qū)之外,允許電動機短時運行的區(qū)域稱為斷續(xù)工作區(qū)。工作區(qū)用轉(zhuǎn)矩和轉(zhuǎn)速的二維平面坐標表示。
額定功率PN:在連續(xù)工作區(qū)內(nèi),電動機所能輸出的最大功率。
額定轉(zhuǎn)矩MN:在連續(xù)工作區(qū)內(nèi),電動機輸出額定功率時的轉(zhuǎn)矩。不同制造商對于額定轉(zhuǎn)矩的定義差別很大。一般都要規(guī)定對應(yīng)的散熱條件。國外通行的做法是說明改指標是在多少面積和厚度的鋁板法蘭上安裝,法蘭溫度保證在20℃或給定的溫度之下測量所得。所以實際工作中往往由于安裝在鑄鐵件,而且夏季高溫超出該測試標準溫度,這樣使用時如果不留有余量,就會造成過熱退磁。國標規(guī)定環(huán)境溫度40度的標準條件對中國環(huán)境是比較合理的。嚴肅的廠商在按照標準測定的額定值之下會留取一定的設(shè)計余量作為公布的額定力矩,這樣更為安全。
額定電流IN:額定扭矩對應(yīng)的電流。
額定轉(zhuǎn)速nN:電動機在連續(xù)工作區(qū)內(nèi),在額定轉(zhuǎn)矩下允許工作的最高轉(zhuǎn)速。
連續(xù)堵轉(zhuǎn)轉(zhuǎn)矩MO:在連續(xù)工作區(qū)內(nèi),電動機堵轉(zhuǎn)時所能輸出的最大轉(zhuǎn)矩。一般轉(zhuǎn)速低于100rpm視為堵轉(zhuǎn)工作區(qū)間。
連續(xù)堵轉(zhuǎn)電流I0:對應(yīng)連續(xù)堵轉(zhuǎn)轉(zhuǎn)矩時的電流。
峰值扭矩Mmax:允許電機輸出的最大力矩。不同廠商標稱條件不同,且差異很大。有的標注成退磁電流對應(yīng)的力矩,這樣的標注實際是不可使用改峰值力矩的,機械設(shè)計人員要留有足夠的余量,以防工作力矩過大而使電機退磁失效。如果按照工作制標注的最大力矩,那是在工程上具有參考價值的。按照S3-10%標注的峰值力矩是最具有工程的參考價值,可以理解為連續(xù)工作時間3s所允許的最大工作轉(zhuǎn)矩,這在機器人上是足夠的。多關(guān)節(jié)機器人的重復(fù)過載一般在2.0倍上下。
峰值電流Imax:峰值力矩對應(yīng)的工作電流。
電氣時間常數(shù)Te:電流對于所加電壓的響應(yīng)速度的特性常數(shù),定義為電動機端子間加上固定的電壓之后,電流成為最終電流的1-e-1(約63.2%)時所用的時間。伺服電機的電氣時間常數(shù)一般是指定子繞組的電感與電阻的比值(te=L/R),與伺服系統(tǒng)的電流階躍響應(yīng)時間有關(guān),但未必相當。
機械時間常數(shù)Tm:伺服電機的機械時間常數(shù)根據(jù)定義:tm=R*J/Ke*Kt,即與繞組電阻、轉(zhuǎn)子轉(zhuǎn)動慣量、電機反電勢系數(shù)、電機力矩系數(shù)有關(guān)。拖動電機的機械時間常數(shù)大約與空載從零速加速到平衡轉(zhuǎn)速的63.2%所需的時間相當。在伺服系統(tǒng)中,該常數(shù)在數(shù)量上可能與系統(tǒng)的速度環(huán)階躍響應(yīng)時間相當。
反電動勢常數(shù)Ke:電動機在單位轉(zhuǎn)速下感應(yīng)的空載反電勢值。常規(guī)指每1000rpm對應(yīng)的空載反電勢,單位為V/Krpm。
扭矩常數(shù)Kt:單位電流對應(yīng)的電機輸出扭矩。電機的反電勢系數(shù)Ke與力矩系數(shù)Kt之間的關(guān)系,一般Kt=9.55*Ke*1.732,其中Kt的單位是Nm/A,Ke的單位是V/rpm,Ke=Kt。Ke這里是線反電勢。
如果電機資料里沒有給出Kt和Ke參數(shù),可以根據(jù)額定力矩和額定電流導(dǎo)出Kt,然后根據(jù)Kt=9.55*Ke*1.732間接導(dǎo)出線反電勢系數(shù)Ke了,即:Ke=0.1047*Kt/1.732,單位V/rpm;或者:Ke=104.7*Kt/1.732,單位V/Krpm,或mV/rpm。
由于電源電壓的限制,為了保證高響應(yīng),電機的反電勢常熟就要設(shè)計的相對較低,保證高速下有足夠的壓差從而獲得充足的電流。而大電流對電機增加了電機的發(fā)熱負擔。從而使得機器人電機的功率密度要較高,能實現(xiàn)小體積,大扭矩,低發(fā)熱。
轉(zhuǎn)子轉(zhuǎn)動慣量J:電動機轉(zhuǎn)子的轉(zhuǎn)動慣量.機器人電機的轉(zhuǎn)動慣量非常重要,直接關(guān)系到機器人工作的穩(wěn)定性。因為機器人往往是多軸聯(lián)動的。比如關(guān)節(jié)機器人的第二軸,需要很大的電機慣量來適應(yīng)臂展打開和收縮起來的巨大負載慣量變化。
齒槽轉(zhuǎn)矩:當帶永磁體的電動機繞組開路時,電動機回轉(zhuǎn)一周內(nèi),由于電樞鐵心開槽,有趨于最小磁阻位置的傾向而產(chǎn)生的周期性轉(zhuǎn)矩。
過載能力:在規(guī)定條件下,電動機能夠在規(guī)定的時間內(nèi)輸出一定功率或轉(zhuǎn)矩而不超過規(guī)定峰值電流的能力。通常把峰值電流與額定電流之比稱為電流過載倍數(shù),峰值轉(zhuǎn)矩與額定轉(zhuǎn)矩之比稱為轉(zhuǎn)矩過載倍數(shù)。通常機器人電機要保證3倍左右的扭矩過載。
最高轉(zhuǎn)速nN:在間歇工作區(qū)內(nèi),電動機所能達到的最大轉(zhuǎn)速。不同的電機廠對于最高轉(zhuǎn)速的定義差別很大,機器人電機常常給出的是實際運行時可以重復(fù)工作的最高轉(zhuǎn)速。在最高轉(zhuǎn)速時,對應(yīng)的最大力矩可以超過額定力矩的2倍,這樣保證全速度范圍的加速響應(yīng)。
機器人對伺服電機的性能要求和選型介紹
直線型機械手臂機器人
直角坐標機器人顧名思義主要以直線移動,如圖3所示。直角坐標機器人的產(chǎn)品參數(shù)主要以負載和行程為選型及設(shè)計基礎(chǔ),通常情況下為2k、5kg、10kg、15kg、25kg、35kg……200kg,行程通常情況下以定制為主,X軸可無限延長,Y軸有效行程在3m以內(nèi),Z軸雙段倍數(shù)的有效行程在3.5以內(nèi)。
在直角坐標機器人中速度一般情況下在5m/s以內(nèi),加速度在10G以內(nèi),重復(fù)定位精度通常在0.5以內(nèi),在長行程的直角坐標機器人中以精度及速度為基礎(chǔ),在短距離行程中以高加速度和精度為基礎(chǔ)。
并聯(lián)機器人
Delta機器人屬于高速、輕載的并聯(lián)機器人,一般通過示教編程或視覺系統(tǒng)捕捉目標物體,由三個并聯(lián)的伺服軸來確定抓具中心的空間位置,實現(xiàn)對目標物體的搬運,定位等操作。
Delta機器人主要應(yīng)用于食品、藥品和電子產(chǎn)品的分揀、加工、裝配。Delta機器人以其重量輕、體積小、運動速度快、定位精確、成本低、效率高等特點,在市場上正被廣泛應(yīng)用。且由于其形似倒立的Δ符號得名。
Delta機器人的負重一般在2kg-3kg,速度可達10m/s,加速度可達150m/s2,每分鐘可抓取300次以上,這就要求伺服電機的響應(yīng)非常快。由于負載相對固定,電機的慣量越小越好,以便高加速下更好的響應(yīng)和更小的自身損耗。
平面關(guān)節(jié)機器人
SCARA機器人又稱水平多關(guān)節(jié)機器人。是一種圓柱坐標型的特殊類型的工業(yè)機器人。一般有4個自由度,可在包括沿X、Y、Z方向的平移和繞Z軸的旋轉(zhuǎn)。SCARA機器人的特點是負載小、速度快,因此其主要應(yīng)用在快速分揀、精密裝配等3C行業(yè)、食品行業(yè)等領(lǐng)域。
伺服電機的配置大體如表3所示。
多關(guān)節(jié)機械手
關(guān)節(jié)機器人,也稱關(guān)節(jié)手臂機器人或關(guān)節(jié)機械手臂,是當今工業(yè)領(lǐng)域中最常見的工業(yè)機器人的形態(tài)之一,適合用于諸多工業(yè)領(lǐng)域的機械自動化作業(yè)。擁有五個或六個旋轉(zhuǎn)軸,類似于人類的手臂。應(yīng)用領(lǐng)域有裝貨、卸貨、噴漆、表面處理、測試、測量、弧焊、點焊、包裝、裝配、切屑機床、固定、特種裝配操作、鍛造、鑄造等。
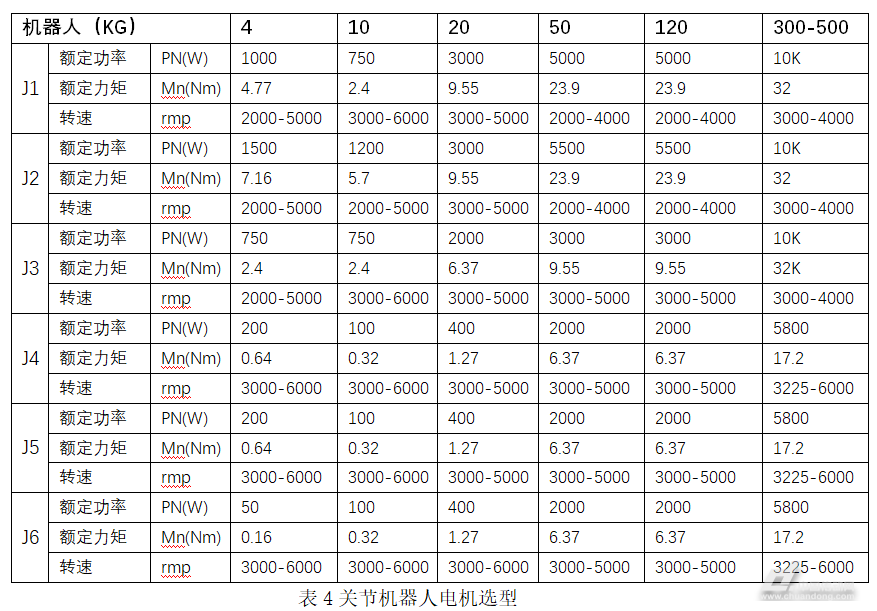
由圖6看出,伺服電機帶動的機構(gòu)在工作過程成姿態(tài)不斷變化,并且電機本身又是機構(gòu)重量的一部分,所以電機慣量要有一定的抗擾動范圍,以便容易在穩(wěn)定區(qū)工作,這樣就要求電機從第一軸,到第六軸都要工中大慣量電機,尤其第二軸在臂展完全打開和收回的兩種姿態(tài)下慣量差異很大,電機最好用大慣量電機。
有關(guān)慣量比和穩(wěn)定控制工作區(qū)的介紹是一個老話題,可以檢索其它專業(yè)文章。工程上通常的關(guān)節(jié)機器人電機選型如表4所示,電機慣量會隨著響應(yīng)和工作性質(zhì)不同有所不一樣。
工業(yè)機器人專用伺服電機及選型
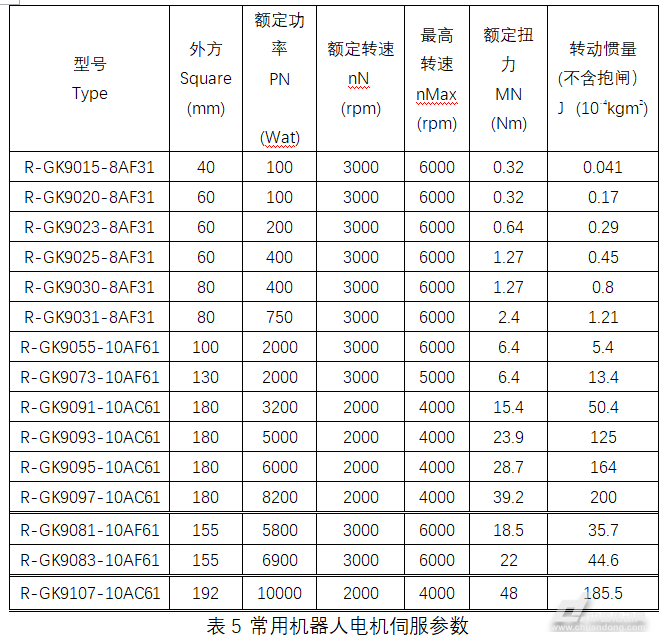
以工業(yè)機器人對伺服電機的需求為基礎(chǔ),以德、日等先進企業(yè)產(chǎn)品性能為目標,瞄準當前交流伺服電機主要朝著高功率密度、高響應(yīng)、高精度、高速度、高效率、低溫升的方向發(fā)展,登奇最新研發(fā)的GK9系列工業(yè)機器人專用伺服電機功率范圍在0.1~37kW之間,額定轉(zhuǎn)速最高可達6000rpm的7個框號20個以上規(guī)格、高功率體積比,通過電磁、結(jié)構(gòu)方案設(shè)計,采用新材料,研究新工藝,優(yōu)化電機齒槽效應(yīng)、體積功率密度比、過載倍數(shù)、溫升、效率等關(guān)鍵技術(shù)指標。同時,針對伺服電機定子線圈端部占比高、匝間間隙大、影響熱量傳遞的問題,集定子真空絕緣浸漆和真空高導(dǎo)熱樹脂灌封技術(shù)為一體的直接導(dǎo)熱繞組絕緣系統(tǒng),定子導(dǎo)熱能力大大提高,匝間絕緣及對地絕緣可靠性改善,增強了抗電暈及浪涌沖擊能力,使伺服電機具備了在濕熱、鹽霧、霉菌環(huán)境下可靠運行的能力。采用無機殼鐵心定子,省掉了機殼熱套,降低了能耗;平面無止口裝配及整體加工工藝,省掉了機殼、前端蓋、后端蓋的車削、鉆孔、攻絲加工工序,提高了電機制造效率,降低了產(chǎn)品成本;一次裝夾,不掉頭完成伺服電機法蘭端面、止口、前后軸承室整體加工,無分體加工裝配的累積誤差,有效地提高了伺服電機旋轉(zhuǎn)精度,提升了伺服電機可靠性水平及使用壽命。
以登奇GK9系列為例,常用機器人電機伺服參數(shù)如表5所示。
(注:本文有關(guān)伺服電機的參數(shù)術(shù)語解釋,參考了哈爾濱工業(yè)大學主編的《數(shù)控機床電氣設(shè)備及系統(tǒng)伺服電動機性能試驗規(guī)范》。直線型機械手臂機器人部分在寧波偉立機器人陳富乳先生的幫助下完成。并聯(lián)機器人部分在佛山玖州自控技術(shù)有限公司劉嘉華先生的協(xié)助下完成。關(guān)節(jié)機器人部分在上海新時達嚴彩忠先生的協(xié)助下完成。在這里向上述各位業(yè)界同仁報以衷心的感謝。)
審核編輯:郭婷
-
機器人
+關(guān)注
關(guān)注
213文章
29691瀏覽量
212583 -
伺服電機
+關(guān)注
關(guān)注
88文章
2114瀏覽量
59541
原文標題:工業(yè)機器人關(guān)鍵零部件之永磁伺服電機
文章出處:【微信號:旺材伺服與運動控制,微信公眾號:旺材伺服與運動控制】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
人形機器人關(guān)節(jié)模組關(guān)鍵技術(shù)解析,及產(chǎn)業(yè)鏈上游電機/傳感器企業(yè)一覽

Allegro創(chuàng)新電機驅(qū)動方案在工業(yè)自動化與機器人中的應(yīng)用

機器人和自動化的未來(2)

海康機器人布局關(guān)節(jié)機器人業(yè)務(wù)
工業(yè)機器人工作站的建設(shè)意義
關(guān)節(jié)電機驅(qū)動,解鎖智能機器人 的“靈動” 密碼

其利天下技術(shù)·伺服電機在機器人技術(shù)中的應(yīng)用

伺服電動缸在人形機器人中的應(yīng)用
機器人關(guān)節(jié)的靈動之源:揭秘舵機的技術(shù)奧秘
伺服系統(tǒng)在機器人中的作用 伺服系統(tǒng)與傳統(tǒng)電機對比
伺服電機在自動化中的工作原理
伺服電機在機器人中的應(yīng)用有哪些
伺服驅(qū)動器在機器人中的應(yīng)用案例
愛普生SG-8101CA可編程晶振應(yīng)用在工業(yè)自動化機器人






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論