") 人形機(jī)器人關(guān)節(jié)模組關(guān)鍵技術(shù)解析,及產(chǎn)業(yè)鏈上游電機(jī)/傳感器企業(yè)一覽
人形機(jī)器人關(guān)節(jié)模組關(guān)鍵技術(shù)解析,及產(chǎn)業(yè)鏈上游電機(jī)/傳感器企業(yè)一覽

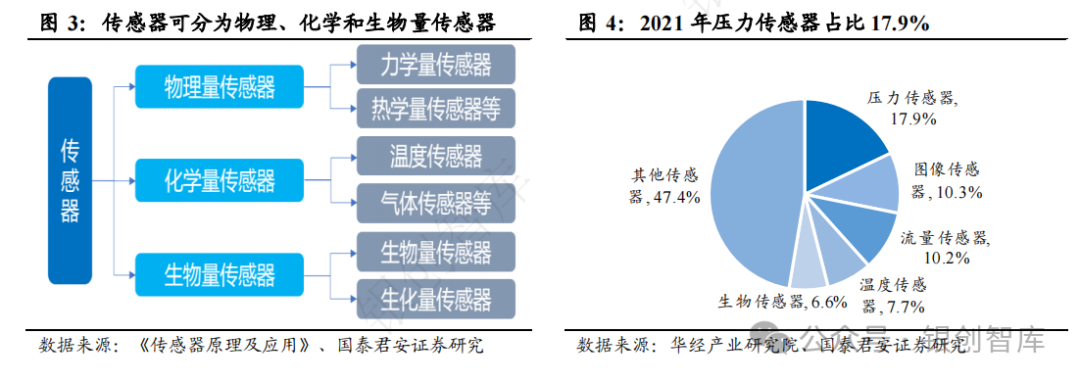
電子發(fā)燒友網(wǎng)報(bào)道(文/李彎彎)人形機(jī)器人關(guān)節(jié)模組是其運(yùn)動(dòng)系統(tǒng)的核心部件,決定了機(jī)器人的靈活性、精度、負(fù)載能力和動(dòng)態(tài)響應(yīng)性能。關(guān)節(jié)模組主要位于人形機(jī)器人的頸部、肘部、腕部、腰部、髖部、膝部、踝部等位置,用來控制機(jī)器人模仿人類頭部、手臂、腿部等的旋轉(zhuǎn)、俯仰、彎曲、伸展、擺動(dòng)等動(dòng)作。
人形機(jī)器人關(guān)節(jié)模組主要有旋轉(zhuǎn)關(guān)節(jié)模組和線性關(guān)節(jié)模組,旋轉(zhuǎn)關(guān)節(jié)模組又主要由伺服驅(qū)動(dòng)、力矩電機(jī)、減速器、力矩傳感器、編碼器、軸承組成;線性關(guān)機(jī)模組主要由伺服驅(qū)動(dòng)、力矩電機(jī)、絲杠、力矩傳感器、編碼器和軸承組成。另外還有靈巧手,主要由空心杯電機(jī)、傳動(dòng)裝置、傳感器(力矩傳感器、觸覺傳感器)、編碼器、微型軸承等組成。
人形機(jī)器人關(guān)節(jié)模組的關(guān)鍵技術(shù)
人形機(jī)器人關(guān)節(jié)模組的關(guān)鍵技術(shù)涵蓋高扭矩密度電機(jī)設(shè)計(jì)、精密傳動(dòng)技術(shù)、傳感器融合、驅(qū)傳感控一體化等方面,這些技術(shù)共同決定了機(jī)器人的運(yùn)動(dòng)性能、負(fù)載能力、精度和可靠性。
高扭矩密度電機(jī)設(shè)計(jì),如無框力矩電機(jī)、空心杯電機(jī)。無框力矩電機(jī)憑借高扭矩密度、緊湊結(jié)構(gòu)和良好散熱性,成為機(jī)器人關(guān)節(jié)的主流動(dòng)力源。其設(shè)計(jì)優(yōu)化了磁場強(qiáng)度和繞組結(jié)構(gòu),能夠在有限空間內(nèi)輸出強(qiáng)大扭矩,同時(shí)降低能耗和發(fā)熱,滿足機(jī)器人關(guān)節(jié)高動(dòng)態(tài)響應(yīng)的需求。
空心杯電機(jī)在靈巧手等末端執(zhí)行部件中,憑借體積小、響應(yīng)快、功率密度高的特點(diǎn),實(shí)現(xiàn)了手指關(guān)節(jié)的靈活驅(qū)動(dòng)。其無鐵芯結(jié)構(gòu)消除了渦流損耗,進(jìn)一步提升了效率與響應(yīng)速度。
精密傳動(dòng)技術(shù),包括諧波減速器、行星減速器、行星滾柱絲杠等。諧波減速器通過柔輪與剛輪的嚙合實(shí)現(xiàn)高減速比傳動(dòng),具有體積小、傳動(dòng)比大、精度高的優(yōu)勢,適用于手臂、腰部等需要靈活運(yùn)動(dòng)的關(guān)節(jié)。其傳動(dòng)效率可達(dá)90%以上,且背隙小,保證了運(yùn)動(dòng)的平穩(wěn)性。
行星減速器采用多齒輪嚙合結(jié)構(gòu),具備高剛性、高扭矩承載能力,適用于腿足部等需要承受較大沖擊的關(guān)節(jié)。其模塊化設(shè)計(jì)便于維護(hù),且成本相對較低。
行星滾柱絲杠作為線性執(zhí)行器的核心部件,通過多滾柱與絲杠的滾動(dòng)接觸實(shí)現(xiàn)高承載、長壽命的直線運(yùn)動(dòng)。其承載能力是滾珠絲杠的3倍以上,且壽命長達(dá)數(shù)萬小時(shí),適用于重載工況下的關(guān)節(jié)模組。
傳感器融合技術(shù),包括力矩傳感器、編碼器、觸覺傳感器等,一維力矩傳感器用于旋轉(zhuǎn)關(guān)節(jié)的扭矩監(jiān)測,六維力矩傳感器則安裝在手腕和腳踝,實(shí)現(xiàn)多向力和力矩的精確測量。這些傳感器為機(jī)器人的力控操作提供了實(shí)時(shí)反饋,確保了抓取、操作等任務(wù)的穩(wěn)定性。
編碼器提供高精度位置反饋,支持關(guān)節(jié)模組的閉環(huán)控制。高分辨率磁編碼器通過磁場變化實(shí)現(xiàn)位置檢測,分辨率可達(dá)微米級,顯著提升了運(yùn)動(dòng)控制的精度。
觸覺傳感器集成于靈巧手,能夠識別抓握物體的材質(zhì)、紋理及受力分布。其高靈敏度和快速響應(yīng)特性,使機(jī)器人能夠完成復(fù)雜的手部操作任務(wù)。
驅(qū)傳感控一體化技術(shù),也就是集成化設(shè)計(jì),將電機(jī)、減速器、編碼器、驅(qū)動(dòng)器等部件高度集成,形成緊湊的模塊化結(jié)構(gòu)。這種設(shè)計(jì)簡化了機(jī)器人的裝配流程,提升了系統(tǒng)的可靠性和維護(hù)性。還有實(shí)時(shí)控制與通信,通過EtherCAT、CANopen等通信協(xié)議,關(guān)節(jié)模組實(shí)現(xiàn)了與主控系統(tǒng)的高速數(shù)據(jù)交互。實(shí)時(shí)位置、速度、電流等數(shù)據(jù)的反饋,支持了機(jī)器人復(fù)雜運(yùn)動(dòng)任務(wù)的精確執(zhí)行。
人形機(jī)器人關(guān)節(jié)模組及上游產(chǎn)業(yè)鏈企業(yè)
人形機(jī)器人人關(guān)節(jié)模組企業(yè)有很多,包括旋轉(zhuǎn)關(guān)節(jié)模組、線性關(guān)節(jié)模組,如泰科機(jī)器人、同川精密、零差云控、紐格爾、宇智動(dòng)力、睿研智控、眾擎機(jī)器人等。
泰科機(jī)器人是一家自主研發(fā)生產(chǎn)機(jī)器人關(guān)節(jié)模組、協(xié)作機(jī)器人、伺服驅(qū)動(dòng)器等機(jī)器人部件的企業(yè),如HJR系列帶力控旋轉(zhuǎn)關(guān)節(jié)模組,專為人形機(jī)器人應(yīng)用研發(fā),提供定制化服務(wù),集行星滾柱絲杠、電機(jī)、編碼器、拉壓力傳感器于體,具有強(qiáng)大推力,性能強(qiáng)勁,穩(wěn)定可靠;精巧結(jié)構(gòu)設(shè)計(jì),整體輕量化程度進(jìn)一步提升;多種規(guī)格,快速組裝人形機(jī)器人,大幅縮短開發(fā)周期。最大推力可以達(dá)到8000N,最大速度400mm/s,最大行程96mm,自重輕至0.5kg。
同川精密從事機(jī)器人及智能裝備核心部件的研發(fā)、生產(chǎn)和銷售。近日在某機(jī)器人展上,該公司就展出了其機(jī)器人關(guān)節(jié)模組,同川精密表示,其機(jī)器人關(guān)節(jié)模組具有高開放度,支持EtherCAT通訊協(xié)議;高硬件適配性,采用雙磁性編碼器、配置制動(dòng)器;全閉環(huán)控制,可提供高精度的傳動(dòng)表現(xiàn)、及超強(qiáng)的抗過載能力等特性。公司全系列機(jī)器人關(guān)節(jié)模組可用于頸部旋轉(zhuǎn)、俯仰,肩部三個(gè)方向旋轉(zhuǎn),肘部旋轉(zhuǎn),腕部旋轉(zhuǎn)。
零差云控表示,一款機(jī)器人可以使用到26個(gè)公司的eRob系列關(guān)節(jié)模組,eRob系列關(guān)節(jié)模組內(nèi)含扭矩傳感器、輸出端多圈絕對值編碼器、精密諧波減速機(jī)、無框力矩電機(jī)、摩擦式制動(dòng)保持器、電機(jī)端絕對值編碼器、直流驅(qū)動(dòng)器,支持EtherCAT、CANopen、Modbus等多種通信協(xié)議,體積小、高度低。其最新升級的直筒I型機(jī)器人關(guān)節(jié)eRob 90I V6長度縮短23mm,重量減少244g,增速起動(dòng)扭矩降低2.94Nm,相同工況下連續(xù)運(yùn)行3小時(shí)溫升降低近10℃。
其上游伺服驅(qū)動(dòng)、力矩電機(jī)、減速器、力矩傳感器、編碼器、空心杯電機(jī)、觸覺傳感器等企業(yè)有哪些呢?如伺服驅(qū)動(dòng)企業(yè)有峰昭科技、雷賽智能、英威騰、固高科技、泰科機(jī)器人、研控自動(dòng)化、高創(chuàng)傳動(dòng)、華成工控、橫川機(jī)器人、拓邦股份、德昌電機(jī)、匯川技術(shù)、泰格運(yùn)控;力矩電機(jī)企業(yè)有雷賽智能、大族電機(jī)、小象電動(dòng)、泰科機(jī)器人、步科電器、零差云控、匯川技術(shù);減速器企業(yè)有科盟創(chuàng)新、杉川諧波、同川精密、德鎂精密、西格傳動(dòng);
力矩傳感器企業(yè)有耐特恩、海伯森、宇宏敏芯、鑫精誠、安培龍、華力創(chuàng)、力準(zhǔn)傳感、科普瑞、藍(lán)點(diǎn)觸控;編碼器企業(yè)有睿研智能、步科電氣、零差云控、兆威機(jī)電、匯川技術(shù)、原相科技;空心杯電機(jī)企業(yè)有雷賽智能、鳴志電器、兆威機(jī)電、五顆星馬達(dá)、唯川科技、金源機(jī)電、拓邦股份、雙環(huán)全新、鑫寶達(dá)、萬至達(dá)電機(jī);觸覺傳感器企業(yè)有帕西尼、鈦深科技、越疆科技、松果體、墨現(xiàn)科技、力感科技、紐迪瑞等。
人形機(jī)器人用到多種力傳感器,以實(shí)現(xiàn)精準(zhǔn)力控、平衡穩(wěn)定和安全防護(hù)等功能,如多維力傳感器、扭矩傳感器。宇宏敏芯近日在某機(jī)器人展會(huì)上展出了多款六維力傳感器產(chǎn)品,如YHD75-200-5L,該多維力傳感器用于力和力矩的測量主要面向于機(jī)器人應(yīng)用、高等教學(xué)領(lǐng)域等,傳感器內(nèi)置高精度信號采集通訊模塊可以實(shí)現(xiàn)RS485/RS232/ETHERCAT等數(shù)字信號或模擬量輸出。檢測力在空間作用的全部信息,其測量精度高、反應(yīng)靈敏、長期穩(wěn)定性好、抗沖擊性強(qiáng)、適用廣泛,且響應(yīng)速度快。
其YHD60-150扭矩傳感器主要面向于機(jī)器人應(yīng)用、高等教學(xué)領(lǐng)域等。有多種量程可供用戶選擇,傳感器內(nèi)置信號采集通訊模塊。該扭矩傳感器有高剛性和抗過載能力,且零點(diǎn)漂移小、抗彎矩能力強(qiáng)、正反對稱性好、受徑向力影響小、靈敏度高,且安裝簡單,特別適用于機(jī)器人關(guān)節(jié)的扭矩測量。
鑫精誠可以為人形機(jī)器人各個(gè)部位提供各種傳感器,如靈巧手用單維微型壓力傳感器、微型六維力傳感,手腕、腳踝用六維傳感器,各關(guān)節(jié)用扭力傳感器。鑫精誠也是國內(nèi)最早關(guān)注病研發(fā)六維力傳感器的企業(yè)之一,可以提供世界最小應(yīng)變式六維力傳感器(直徑僅9.5mm),在國內(nèi)可以提供原理最全的六維力傳感器,包括電阻應(yīng)變式、石英壓電式、MEMS等。
寫在最后
人形機(jī)器人關(guān)節(jié)模組是連接機(jī)器人各部分、驅(qū)動(dòng)和控制動(dòng)作的關(guān)鍵組件,其組成結(jié)構(gòu)因關(guān)節(jié)類型不同而有所差異。旋轉(zhuǎn)關(guān)節(jié)模組是讓人形機(jī)器人關(guān)節(jié)進(jìn)行旋轉(zhuǎn)運(yùn)動(dòng)的裝置,線性關(guān)節(jié)模組將電機(jī)輸出的旋轉(zhuǎn)運(yùn)動(dòng)轉(zhuǎn)化為伸縮式直線運(yùn)動(dòng)。人形機(jī)器人各關(guān)節(jié)的靈活性如何,離不開內(nèi)部電機(jī)、傳感器等各個(gè)部件的共同作用。
因此可以看到,人形機(jī)器人關(guān)節(jié)模組上游產(chǎn)業(yè)鏈企業(yè)都在積極推進(jìn)產(chǎn)品創(chuàng)新,來共同促進(jìn)人形機(jī)器人技術(shù)升級,比如說靈巧手,除了電機(jī)的不斷優(yōu)化來使其手指關(guān)節(jié)更靈活,相關(guān)企業(yè)也在積極設(shè)計(jì)更適合的觸覺傳感器來提升靈巧手的觸感能力,來提升靈巧手的精細(xì)作業(yè)能力。
人形機(jī)器人關(guān)節(jié)模組主要有旋轉(zhuǎn)關(guān)節(jié)模組和線性關(guān)節(jié)模組,旋轉(zhuǎn)關(guān)節(jié)模組又主要由伺服驅(qū)動(dòng)、力矩電機(jī)、減速器、力矩傳感器、編碼器、軸承組成;線性關(guān)機(jī)模組主要由伺服驅(qū)動(dòng)、力矩電機(jī)、絲杠、力矩傳感器、編碼器和軸承組成。另外還有靈巧手,主要由空心杯電機(jī)、傳動(dòng)裝置、傳感器(力矩傳感器、觸覺傳感器)、編碼器、微型軸承等組成。
人形機(jī)器人關(guān)節(jié)模組的關(guān)鍵技術(shù)
人形機(jī)器人關(guān)節(jié)模組的關(guān)鍵技術(shù)涵蓋高扭矩密度電機(jī)設(shè)計(jì)、精密傳動(dòng)技術(shù)、傳感器融合、驅(qū)傳感控一體化等方面,這些技術(shù)共同決定了機(jī)器人的運(yùn)動(dòng)性能、負(fù)載能力、精度和可靠性。
高扭矩密度電機(jī)設(shè)計(jì),如無框力矩電機(jī)、空心杯電機(jī)。無框力矩電機(jī)憑借高扭矩密度、緊湊結(jié)構(gòu)和良好散熱性,成為機(jī)器人關(guān)節(jié)的主流動(dòng)力源。其設(shè)計(jì)優(yōu)化了磁場強(qiáng)度和繞組結(jié)構(gòu),能夠在有限空間內(nèi)輸出強(qiáng)大扭矩,同時(shí)降低能耗和發(fā)熱,滿足機(jī)器人關(guān)節(jié)高動(dòng)態(tài)響應(yīng)的需求。
空心杯電機(jī)在靈巧手等末端執(zhí)行部件中,憑借體積小、響應(yīng)快、功率密度高的特點(diǎn),實(shí)現(xiàn)了手指關(guān)節(jié)的靈活驅(qū)動(dòng)。其無鐵芯結(jié)構(gòu)消除了渦流損耗,進(jìn)一步提升了效率與響應(yīng)速度。
精密傳動(dòng)技術(shù),包括諧波減速器、行星減速器、行星滾柱絲杠等。諧波減速器通過柔輪與剛輪的嚙合實(shí)現(xiàn)高減速比傳動(dòng),具有體積小、傳動(dòng)比大、精度高的優(yōu)勢,適用于手臂、腰部等需要靈活運(yùn)動(dòng)的關(guān)節(jié)。其傳動(dòng)效率可達(dá)90%以上,且背隙小,保證了運(yùn)動(dòng)的平穩(wěn)性。
行星減速器采用多齒輪嚙合結(jié)構(gòu),具備高剛性、高扭矩承載能力,適用于腿足部等需要承受較大沖擊的關(guān)節(jié)。其模塊化設(shè)計(jì)便于維護(hù),且成本相對較低。
行星滾柱絲杠作為線性執(zhí)行器的核心部件,通過多滾柱與絲杠的滾動(dòng)接觸實(shí)現(xiàn)高承載、長壽命的直線運(yùn)動(dòng)。其承載能力是滾珠絲杠的3倍以上,且壽命長達(dá)數(shù)萬小時(shí),適用于重載工況下的關(guān)節(jié)模組。
傳感器融合技術(shù),包括力矩傳感器、編碼器、觸覺傳感器等,一維力矩傳感器用于旋轉(zhuǎn)關(guān)節(jié)的扭矩監(jiān)測,六維力矩傳感器則安裝在手腕和腳踝,實(shí)現(xiàn)多向力和力矩的精確測量。這些傳感器為機(jī)器人的力控操作提供了實(shí)時(shí)反饋,確保了抓取、操作等任務(wù)的穩(wěn)定性。
編碼器提供高精度位置反饋,支持關(guān)節(jié)模組的閉環(huán)控制。高分辨率磁編碼器通過磁場變化實(shí)現(xiàn)位置檢測,分辨率可達(dá)微米級,顯著提升了運(yùn)動(dòng)控制的精度。
觸覺傳感器集成于靈巧手,能夠識別抓握物體的材質(zhì)、紋理及受力分布。其高靈敏度和快速響應(yīng)特性,使機(jī)器人能夠完成復(fù)雜的手部操作任務(wù)。
驅(qū)傳感控一體化技術(shù),也就是集成化設(shè)計(jì),將電機(jī)、減速器、編碼器、驅(qū)動(dòng)器等部件高度集成,形成緊湊的模塊化結(jié)構(gòu)。這種設(shè)計(jì)簡化了機(jī)器人的裝配流程,提升了系統(tǒng)的可靠性和維護(hù)性。還有實(shí)時(shí)控制與通信,通過EtherCAT、CANopen等通信協(xié)議,關(guān)節(jié)模組實(shí)現(xiàn)了與主控系統(tǒng)的高速數(shù)據(jù)交互。實(shí)時(shí)位置、速度、電流等數(shù)據(jù)的反饋,支持了機(jī)器人復(fù)雜運(yùn)動(dòng)任務(wù)的精確執(zhí)行。
人形機(jī)器人關(guān)節(jié)模組及上游產(chǎn)業(yè)鏈企業(yè)
人形機(jī)器人人關(guān)節(jié)模組企業(yè)有很多,包括旋轉(zhuǎn)關(guān)節(jié)模組、線性關(guān)節(jié)模組,如泰科機(jī)器人、同川精密、零差云控、紐格爾、宇智動(dòng)力、睿研智控、眾擎機(jī)器人等。
泰科機(jī)器人是一家自主研發(fā)生產(chǎn)機(jī)器人關(guān)節(jié)模組、協(xié)作機(jī)器人、伺服驅(qū)動(dòng)器等機(jī)器人部件的企業(yè),如HJR系列帶力控旋轉(zhuǎn)關(guān)節(jié)模組,專為人形機(jī)器人應(yīng)用研發(fā),提供定制化服務(wù),集行星滾柱絲杠、電機(jī)、編碼器、拉壓力傳感器于體,具有強(qiáng)大推力,性能強(qiáng)勁,穩(wěn)定可靠;精巧結(jié)構(gòu)設(shè)計(jì),整體輕量化程度進(jìn)一步提升;多種規(guī)格,快速組裝人形機(jī)器人,大幅縮短開發(fā)周期。最大推力可以達(dá)到8000N,最大速度400mm/s,最大行程96mm,自重輕至0.5kg。
同川精密從事機(jī)器人及智能裝備核心部件的研發(fā)、生產(chǎn)和銷售。近日在某機(jī)器人展上,該公司就展出了其機(jī)器人關(guān)節(jié)模組,同川精密表示,其機(jī)器人關(guān)節(jié)模組具有高開放度,支持EtherCAT通訊協(xié)議;高硬件適配性,采用雙磁性編碼器、配置制動(dòng)器;全閉環(huán)控制,可提供高精度的傳動(dòng)表現(xiàn)、及超強(qiáng)的抗過載能力等特性。公司全系列機(jī)器人關(guān)節(jié)模組可用于頸部旋轉(zhuǎn)、俯仰,肩部三個(gè)方向旋轉(zhuǎn),肘部旋轉(zhuǎn),腕部旋轉(zhuǎn)。
零差云控表示,一款機(jī)器人可以使用到26個(gè)公司的eRob系列關(guān)節(jié)模組,eRob系列關(guān)節(jié)模組內(nèi)含扭矩傳感器、輸出端多圈絕對值編碼器、精密諧波減速機(jī)、無框力矩電機(jī)、摩擦式制動(dòng)保持器、電機(jī)端絕對值編碼器、直流驅(qū)動(dòng)器,支持EtherCAT、CANopen、Modbus等多種通信協(xié)議,體積小、高度低。其最新升級的直筒I型機(jī)器人關(guān)節(jié)eRob 90I V6長度縮短23mm,重量減少244g,增速起動(dòng)扭矩降低2.94Nm,相同工況下連續(xù)運(yùn)行3小時(shí)溫升降低近10℃。
其上游伺服驅(qū)動(dòng)、力矩電機(jī)、減速器、力矩傳感器、編碼器、空心杯電機(jī)、觸覺傳感器等企業(yè)有哪些呢?如伺服驅(qū)動(dòng)企業(yè)有峰昭科技、雷賽智能、英威騰、固高科技、泰科機(jī)器人、研控自動(dòng)化、高創(chuàng)傳動(dòng)、華成工控、橫川機(jī)器人、拓邦股份、德昌電機(jī)、匯川技術(shù)、泰格運(yùn)控;力矩電機(jī)企業(yè)有雷賽智能、大族電機(jī)、小象電動(dòng)、泰科機(jī)器人、步科電器、零差云控、匯川技術(shù);減速器企業(yè)有科盟創(chuàng)新、杉川諧波、同川精密、德鎂精密、西格傳動(dòng);
力矩傳感器企業(yè)有耐特恩、海伯森、宇宏敏芯、鑫精誠、安培龍、華力創(chuàng)、力準(zhǔn)傳感、科普瑞、藍(lán)點(diǎn)觸控;編碼器企業(yè)有睿研智能、步科電氣、零差云控、兆威機(jī)電、匯川技術(shù)、原相科技;空心杯電機(jī)企業(yè)有雷賽智能、鳴志電器、兆威機(jī)電、五顆星馬達(dá)、唯川科技、金源機(jī)電、拓邦股份、雙環(huán)全新、鑫寶達(dá)、萬至達(dá)電機(jī);觸覺傳感器企業(yè)有帕西尼、鈦深科技、越疆科技、松果體、墨現(xiàn)科技、力感科技、紐迪瑞等。
人形機(jī)器人用到多種力傳感器,以實(shí)現(xiàn)精準(zhǔn)力控、平衡穩(wěn)定和安全防護(hù)等功能,如多維力傳感器、扭矩傳感器。宇宏敏芯近日在某機(jī)器人展會(huì)上展出了多款六維力傳感器產(chǎn)品,如YHD75-200-5L,該多維力傳感器用于力和力矩的測量主要面向于機(jī)器人應(yīng)用、高等教學(xué)領(lǐng)域等,傳感器內(nèi)置高精度信號采集通訊模塊可以實(shí)現(xiàn)RS485/RS232/ETHERCAT等數(shù)字信號或模擬量輸出。檢測力在空間作用的全部信息,其測量精度高、反應(yīng)靈敏、長期穩(wěn)定性好、抗沖擊性強(qiáng)、適用廣泛,且響應(yīng)速度快。
其YHD60-150扭矩傳感器主要面向于機(jī)器人應(yīng)用、高等教學(xué)領(lǐng)域等。有多種量程可供用戶選擇,傳感器內(nèi)置信號采集通訊模塊。該扭矩傳感器有高剛性和抗過載能力,且零點(diǎn)漂移小、抗彎矩能力強(qiáng)、正反對稱性好、受徑向力影響小、靈敏度高,且安裝簡單,特別適用于機(jī)器人關(guān)節(jié)的扭矩測量。
鑫精誠可以為人形機(jī)器人各個(gè)部位提供各種傳感器,如靈巧手用單維微型壓力傳感器、微型六維力傳感,手腕、腳踝用六維傳感器,各關(guān)節(jié)用扭力傳感器。鑫精誠也是國內(nèi)最早關(guān)注病研發(fā)六維力傳感器的企業(yè)之一,可以提供世界最小應(yīng)變式六維力傳感器(直徑僅9.5mm),在國內(nèi)可以提供原理最全的六維力傳感器,包括電阻應(yīng)變式、石英壓電式、MEMS等。
寫在最后
人形機(jī)器人關(guān)節(jié)模組是連接機(jī)器人各部分、驅(qū)動(dòng)和控制動(dòng)作的關(guān)鍵組件,其組成結(jié)構(gòu)因關(guān)節(jié)類型不同而有所差異。旋轉(zhuǎn)關(guān)節(jié)模組是讓人形機(jī)器人關(guān)節(jié)進(jìn)行旋轉(zhuǎn)運(yùn)動(dòng)的裝置,線性關(guān)節(jié)模組將電機(jī)輸出的旋轉(zhuǎn)運(yùn)動(dòng)轉(zhuǎn)化為伸縮式直線運(yùn)動(dòng)。人形機(jī)器人各關(guān)節(jié)的靈活性如何,離不開內(nèi)部電機(jī)、傳感器等各個(gè)部件的共同作用。
因此可以看到,人形機(jī)器人關(guān)節(jié)模組上游產(chǎn)業(yè)鏈企業(yè)都在積極推進(jìn)產(chǎn)品創(chuàng)新,來共同促進(jìn)人形機(jī)器人技術(shù)升級,比如說靈巧手,除了電機(jī)的不斷優(yōu)化來使其手指關(guān)節(jié)更靈活,相關(guān)企業(yè)也在積極設(shè)計(jì)更適合的觸覺傳感器來提升靈巧手的觸感能力,來提升靈巧手的精細(xì)作業(yè)能力。
聲明:本文內(nèi)容及配圖由入駐作者撰寫或者入駐合作網(wǎng)站授權(quán)轉(zhuǎn)載。文章觀點(diǎn)僅代表作者本人,不代表電子發(fā)燒友網(wǎng)立場。文章及其配圖僅供工程師學(xué)習(xí)之用,如有內(nèi)容侵權(quán)或者其他違規(guī)問題,請聯(lián)系本站處理。
舉報(bào)投訴
-
電機(jī)
+關(guān)注
關(guān)注
143文章
9322瀏覽量
149883 -
人形機(jī)器人
+關(guān)注
關(guān)注
7文章
750瀏覽量
17669 -
傳感
+關(guān)注
關(guān)注
1文章
127瀏覽量
31868
發(fā)布評論請先 登錄
相關(guān)推薦
熱點(diǎn)推薦
納芯微磁傳感器技術(shù)推動(dòng)人形機(jī)器人性能提升
納芯微磁傳感器技術(shù)為人形機(jī)器人運(yùn)動(dòng)控制提供了關(guān)鍵解決方案,其高精度磁角度編碼器可精準(zhǔn)檢測

主要人形機(jī)器人廠商的電機(jī)驅(qū)動(dòng)與傳感系統(tǒng)對比
人形機(jī)器人電機(jī)驅(qū)動(dòng)與傳感技術(shù)現(xiàn)狀與趨勢 1. 電機(jī)驅(qū)動(dòng)關(guān)鍵技
國產(chǎn)替代破局:人形機(jī)器人傳感器產(chǎn)業(yè)鏈深度拆解(附技術(shù)路線對比)
傳感器為人形機(jī)器人感知層核心零部件,人形機(jī)器人對傳感器需求較大,成本占比較高,本文將對 六維力矩
實(shí)現(xiàn)“AI+”關(guān)鍵突破,剖析人形機(jī)器人里的關(guān)鍵技術(shù)和未來趨勢
乃至家庭,勢必深刻改變?nèi)祟惿鐣?huì)的運(yùn)行模式。 ? 在《人形機(jī)器人的電機(jī)控制和傳感器》專題中,瑞薩電子嵌入式處理器事業(yè)部高級經(jīng)理劉濤在接受電子發(fā)

一文讀懂德州儀器的人形機(jī)器人電機(jī)驅(qū)動(dòng)和傳感布局
機(jī)器人市場規(guī)模預(yù)計(jì)在 2029 年將達(dá)到 750 億元,2035 年更是有望突破 3000 億元。 ? 在電子發(fā)燒友網(wǎng)《人形機(jī)器人的電機(jī)控制和傳感器

ST、漢威科技和紐迪瑞入局人形機(jī)器人,多家企業(yè)亮出關(guān)鍵傳感器
傳感器、激光雷達(dá)、柔性電子皮膚、高性能慣性測量單元(IMU)及力控扭矩傳感器等在該領(lǐng)域具有較高的技術(shù)價(jià)值和市場潛力。 2025年,人形機(jī)器人
關(guān)節(jié)電機(jī)驅(qū)動(dòng),解鎖智能機(jī)器人 的“靈動(dòng)” 密碼
在智能機(jī)器人與高端設(shè)備的世界里,關(guān)節(jié)電機(jī)驅(qū)動(dòng)是賦予它們靈動(dòng)身姿的關(guān)鍵。它集成電機(jī)、減速器、傳感器

人形機(jī)器人設(shè)計(jì)中,哪些關(guān)鍵部位需要功率器件?典型電壓/電流參數(shù)如何設(shè)計(jì)?
我們正在研究人形機(jī)器人,想了解在關(guān)節(jié)驅(qū)動(dòng)、電源管理、熱控制等子系統(tǒng)中使用功率器件(如MOSFET、IGBT、IPM)。目前遇到以下問題:
? 功率器件分布不明確 :不清楚哪些關(guān)鍵部位必
發(fā)表于 03-12 14:05
中國在人形機(jī)器人產(chǎn)業(yè)鏈中占據(jù)主導(dǎo)地位
據(jù)摩根士丹利最新發(fā)布的《人形機(jī)器人100:繪制人形機(jī)器人價(jià)值鏈圖譜》顯示,人形
伺服電動(dòng)缸在人形機(jī)器人中的應(yīng)用
集成高精密減速器、高性能電機(jī)、絲桿機(jī)構(gòu)、傳感器以及伺服控制系統(tǒng),伺服電動(dòng)缸在保證更小體積的基礎(chǔ)上實(shí)現(xiàn)了驅(qū)控一體化,從而滿足了人形
發(fā)表于 02-06 09:04
洞察:人形機(jī)器人傳感器產(chǎn)業(yè)鏈概覽
內(nèi)部與性能相關(guān)的力感知能力和與外部交互相關(guān)的觸覺、視覺、聽覺能力都極為關(guān)鍵,直接影響機(jī)器人可使用的范圍。機(jī)器人各精密加工零部件國內(nèi)產(chǎn)業(yè)鏈逐步走向成熟,

泰科機(jī)器人獲獎(jiǎng),開啟人形機(jī)器人關(guān)節(jié)模組新動(dòng)力
泰科機(jī)器人攜多款產(chǎn)品及解決方案驚喜亮相2024高工人形機(jī)器人年會(huì)暨高工金球獎(jiǎng)?lì)C獎(jiǎng)典禮,并憑借深厚的技術(shù)積淀和高效可靠的供應(yīng)鏈體系榮膺“高工金

《人形機(jī)器人產(chǎn)業(yè)地圖(2024)》重磅發(fā)布!
在11月29日舉辦的2024高工人形機(jī)器人年會(huì)上,高工機(jī)器人產(chǎn)業(yè)研究所(GGII)重磅發(fā)布《人形機(jī)器人
發(fā)表于 12-02 09:17
?2582次閱讀

國內(nèi)外部分人形機(jī)器人企業(yè)一覽
人形機(jī)器人的定義人形機(jī)器人是一種仿生機(jī)器人,指形狀及尺寸與人體相似,能夠仿人類運(yùn)動(dòng)、表情、互動(dòng)及






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論